小天体表面纹理曲线精准匹配算法
2021-08-29 06:05:48王光泽郗洪良姚文龙黄翔宇
深空探测学报 2021年3期
王光泽,邵 巍,郗洪良,姚文龙,黄翔宇
(1.青岛科技大学 自动化与电子工程学院,青岛 266100;2.北京控制工程研究所,北京 100094)
引 言
近年来,各国纷纷开展了小天体着陆与采样返回任务[1-2],为获得有价值的科学素材,需要探测器着陆到具有较高的科学价值的特定区域,这就需要探测器具备精确导航的能力。视觉导航是目前发展较为成熟的自主导航方法,并在各种深空探测任务中得到不同程度的发展与应用,其利用光学敏感器件获取天体及其表面图像,通过图像中提取的特征来确定探测器空间位置等信息。
当前用于视觉导航的地标主要分为两类。一类是使用图像中的特征点信息进行导航,例如使用角点检测算法来估计检测器的速度[3-5],Bakambu等[6]提出这类算法通常不如使用图像区域匹配稳定。特征点反映的信息量远低于边缘特征曲线,尤其对于多尺度特征点,存在无法与图像中物理纹理相对应的情况,其应用场景受限。
另一类是将天体表面的岩石和火山口等自然特征用作导航陆标。同时,这些特征还能在着陆阶段用于障碍物躲避。许多学者对陨石坑的探测和匹配方法做了很多研究[7-9]。这些算法中大多数都使用陨石坑形状、阴影等信息进行匹配,在处理沟壑、重叠的坑或不规则的岩石时容易发生误匹配[10]。
不规则曲线特征在天体表面普遍存在,可作为导航陆标进行导航。对曲线精准匹配是进行视觉导航的重要前提[11]。国内外众多学者针对曲线匹配方法展开研究。
基于描述符的方法是曲线匹配重要分支。Liu 等[12]通过按亮度划分曲线支撑区域构建了描述符IOCD(Intensity Order Curve Descriptor)。王志衡等[13]为解决描述符主方向难以确定的问题,提出了描述符IOMSD(Intensity Order based Mean Standard Deviation Descriptor),在图像受到模糊、噪声干扰时,可以保持不变性。Chen 等[14]提出梯度阶曲线描述符,对光照变化与噪声干扰有较好的鲁棒性。基于曲线描述符曲线匹配方法根据曲线支撑区域相似度来进行匹配,当局部判断为匹配时,则认为整条曲线匹配,因此基于曲线描述符曲线匹配计算量较小,但难以实现曲线精准匹配。
基于曲率的方法也是曲线匹配重要方向。Cohen等[15]提出使用B样条来近似拟合曲线,通过曲率等曲线特征的计算进一步完成曲线匹配工作。Taniai[16]等提出基于图像分割的空间曲线局部匹配算法,该算法可以得到空间曲线分段描述,并保证了曲线的光滑性[17]。Cui 等[18]通过计算等积分间隔下曲率实现曲线精准匹配,该算法具有尺度与旋转不变性。基于曲率的曲线匹配,适于处理图像中两条曲线匹配问题,当对多条曲线匹配时计算量过于庞大。
为实现曲线精准匹配,提出一种曲线描述符与曲率相结合的曲线精准匹配算法,通过描述符完成曲线粗匹配,再根据曲率完成精准匹配。本文具体结构安排如下:第一部分介绍了多尺度纹理曲线提取算法与曲线描述符构建方法;第二部分在曲线描述符粗匹配基础上,介绍尺度不变曲率计算与匹配;第三部分在光照、尺度及旋转变换下分析实验结果;第四部分对文章进行总结。
1 曲线描述符匹配
1.1 不规则曲线提取
曲线特征提取是匹配的基础,为综合多尺度纹理特征,对原始图像降采样处理,获得一系列不同分辨率图像,建立高斯金字塔模型。
基于Topal等[19]提出的Edge Drawing算法对每层图像分别进行曲线提取。根据边缘像素特点,使用Sobel算子计算梯度图,为加快计算速度,设置阈值筛选像素梯度,剔除小梯度像素。
为获得连续边缘曲线,放弃逐像素点边缘判断的思路,而采用基于节点的方法。首先根据梯度图,选择局部梯度极大值对应像素点作为节点。之后由节点开始进行像素连接,当满足以下条件之一停止。
1)当不处于边缘区域时,即当前像素点经梯度阈值筛选后,属于被剔除部分;
2)当检测边缘重复时,即对所在曲线进行像素连接过程中,当前像素点已被检测过一次。

将曲线上所有点变换到原尺度后,对离散点进行线性插值。在原尺度空间,对曲线上相邻两点坐标(x1,y1)与(x2,y2),在区间[x1,x2]上某一位置x处纵坐标取值为+

经过坐标变换与插值,高斯金字塔各层曲线提取结果被变换原尺度空间。多尺度曲线提取结果如图1(b)所示,相比单尺度提取结果如图1(a),所得曲线更加全面。同时基于Edge Drawing算法提取的边缘曲线更加连续,并保证单像素宽度,另外曲线基于节点生成,边缘图像噪声较少。
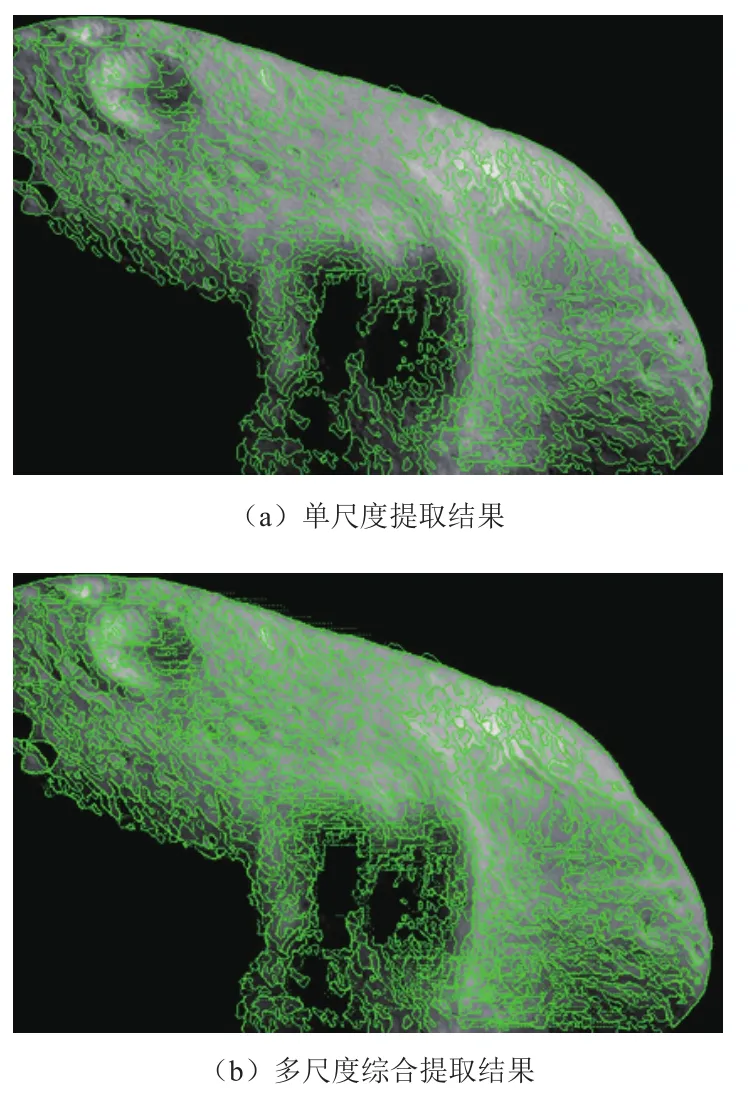
图1 曲线提取结果Fig.1 Curve extraction result
1.2 曲线描述符构建
对曲线进行描述时,采用分段描述的方法,将每段曲线近似作为直线进行描述符构建[10,20],该描述符包含曲线自身特征同时加入其周围纹理信息,具备良好的辨识性。
描述时,将近似直线两侧区域划分为m条矩形带如图2所示将近似直线两侧区域划分为m条矩形带,记作{B1,B2,B3,···,Bm},每条矩形带宽度为w,每个矩形带都是曲线支撑区域的子区域。为保证描述符的旋转不变性,将像素梯度向近似直线方向与正交方向投影。假设子区域中某像素梯度值为g,拟合直线方向为dL,与直线正交方向为d⊥,则局部梯度可表示为
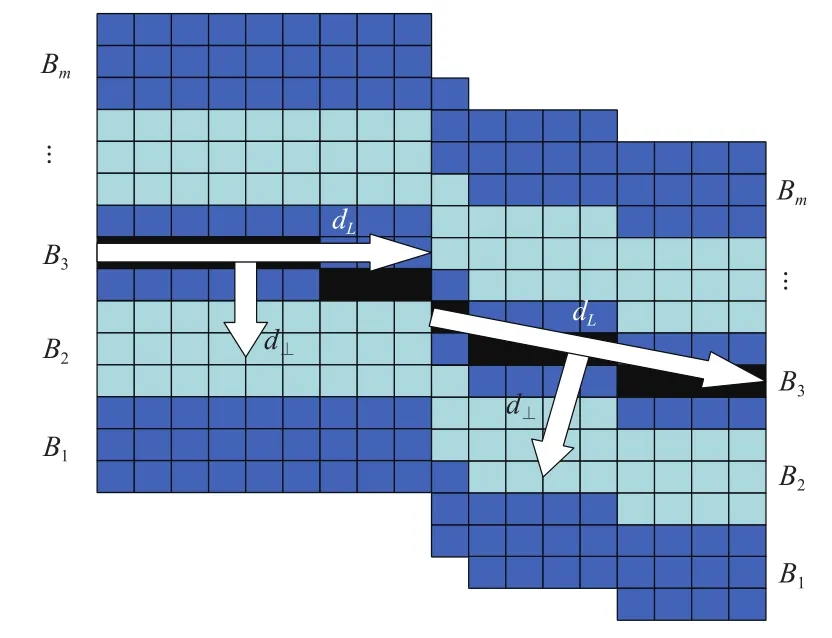
图2 曲线描述符结构Fig.2 Curve descriptor structure

对于第i段曲线支撑区域的Bj矩形带,通过对第k行不同方向梯度值求和可得
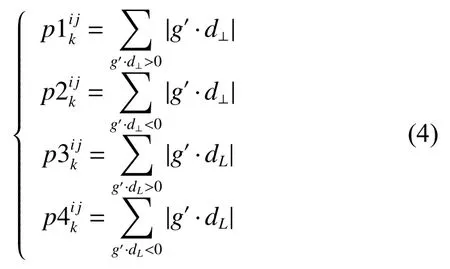
对所有曲线段梯度值求和,可得整条曲线Bj矩形带的第k行梯度信息
将每行不同方向梯度之和堆叠,可得曲线Bj矩形带梯度矩阵
其中:n为计算第j条矩形带所需行数

对Hj每行进行均值向量Uj与标准差向量Sj的求解计算,同时为满足光照不变性进行归一化处理,两者共同构成曲线矩形带Bj的描述符BDj可表示为

通过对所有矩形带描述符进行求解,获得曲线描述符CBD
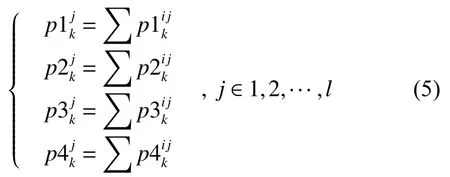
根据最近邻距离比例原则,采用BF匹配算法匹配曲线描述符,曲线粗匹配结果如图3所示。
图3 曲线粗匹配Fig.3 Curves rough matching
2 曲线曲率匹配
2.1 三次B样条曲线拟合
基于曲线描述符的曲线匹配算法仅能对曲线粗略匹配,难以实现最相似部分匹配,影响后续导航精度。本文在此基础上加入基于曲率的曲线匹配算法,以实现对曲线的精准匹配。原始曲线为离散数据形式,为尽可能准确计算曲线曲率,需对曲线数据进行平滑拟合,同时削弱噪声的影响。
传统的贝塞尔曲线拟合方法仅需少量控制点即可生成复杂平滑曲线,控制简便且具有较强控制能力,但灵活性较差,难以修改局部特征,某一控制点发生改变对拟合曲线整体都有影响。针对贝塞尔算法的缺点,B样条拟合算法被提出,该算法逼近多边形特征精度更高,且具备局部修改性[21],B样条算法曲线拟合表达式为

其中:n表示用来拟合曲线的点个数;Pi表示拟合曲线的离散点;Fi,k(t)表示的K阶基函数定义为

三次B样条曲线相比二次B样条曲线更加光滑,同时计算量在可接受范围。通过4个相邻离散点计算可得三次B样条曲线,对式(11)进行求解可得
将式(12)代入式(10),得到三次B样条曲线表达式为

分别用2种算法拟合曲线,结果如图4所示。与3次B样条曲线拟合图4(b)相比,贝塞尔曲线拟合结果图4(a)整体趋势平滑,但对曲线细节表现力较差。基于曲率的曲线匹配算法是根据曲线弯曲程度进行匹配,对曲线细节拟合要求高,贝塞尔拟合曲线易造成误匹配,故B样条曲线拟合算法更适合。
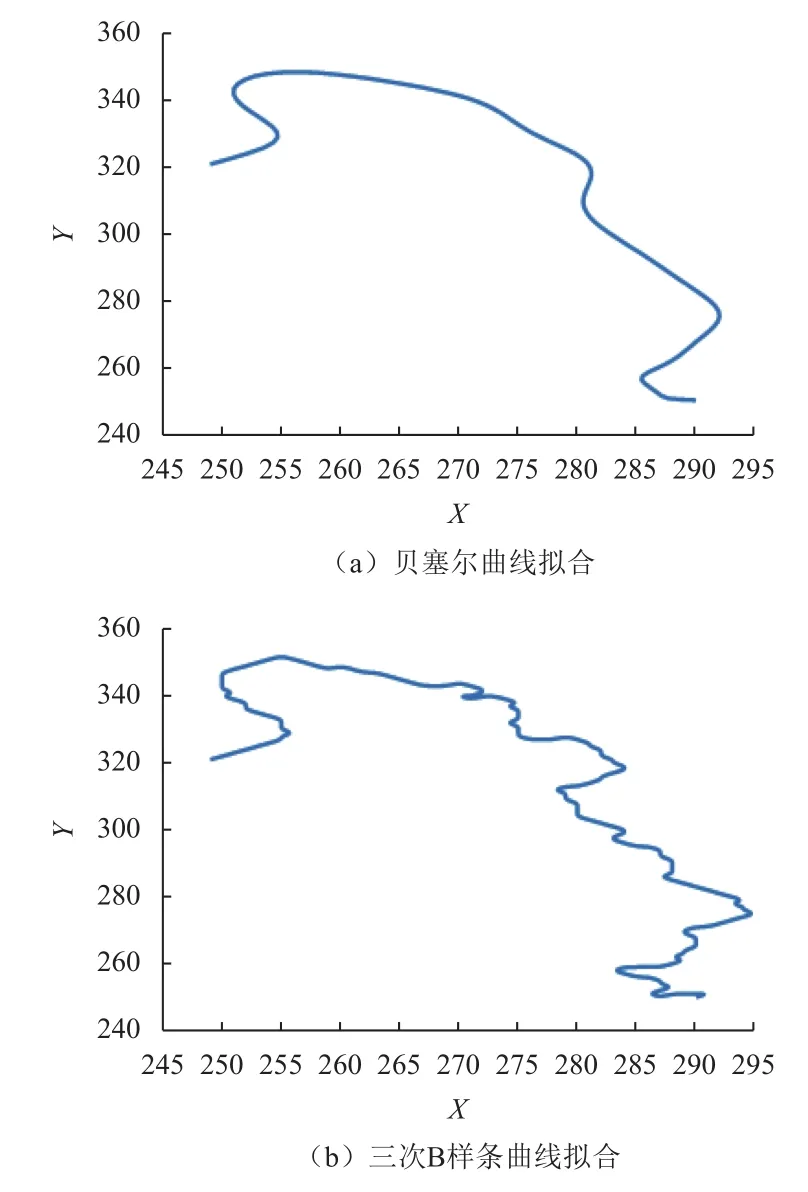
图4 曲线拟合结果Fig.4 Curve fitting results
2.2 尺度不变性曲率计算
对于图5中连续曲线,曲率表示为曲线弧切线转角与弧长之比
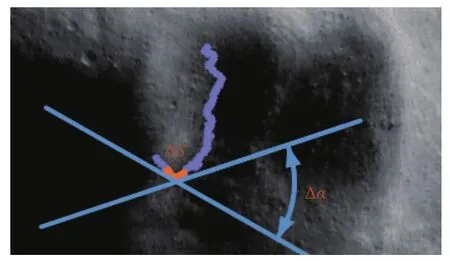
图5 连续曲线曲率Fig.5 Curvature of continuous curve

在曲线曲率基础上进行曲率积分计算,由于曲线中存在拐点,且有符号曲率积分非单调变化,导致同一积分数值可能对应多个曲率值,因此本文选择使用无符号曲率积分。给定弧长为l的曲线,曲线曲率绝对值积分为

其中,K(0∶l)为曲率绝对值之和。将该曲线缩放a倍得到新曲线,其曲率绝对值之和为

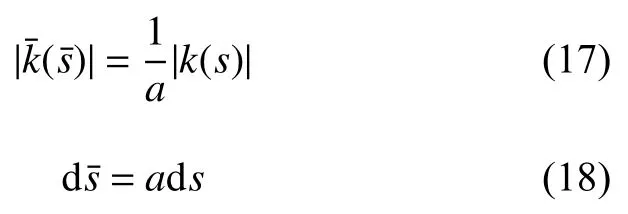
将式(17)与式(18)代入式(16)可得
由式(19)可得曲率积分的尺度不变性,即如果两输入曲线具有相同的部分,则对曲线进行尺度变换,且两者尺度因子为m,则它们在弧长轴上(坐标轴横轴)的跨度之比也为m,且曲率积分(坐标轴纵轴)跨度相等[19],如图6所示。
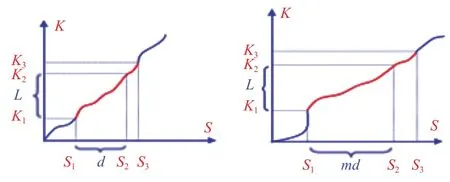
图6 曲率积分尺度不变性Fig.6 Scale invariance of curvature integral
利用曲率绝对值积分尺度不变性,以等曲率积分间隔对曲率进行采样,使采样后曲率具有尺度不变特性。对于尺度不同但存在相似部分的两条曲线,其曲率在经过采样处理后,其相同部分在横轴上跨越相同长度,两条曲线精准匹配问题转换为采样后两曲率曲线的精准匹配问题,简化匹配难度。
等积分间隔采样后,原曲率曲线变化剧烈处被拉长,而变化较平缓处被压缩。在设置采样间隔时,曲率积分间隔越小,曲线细节信息越准确,但同时会保留更多噪声,且计算量大;而间隔增大时会丢失部分数据信息,但可以削弱噪声影响并且减小计算量,如图7所示。经实验,积分间隔设置为5时,能保证数据精度同时加快运行速度。
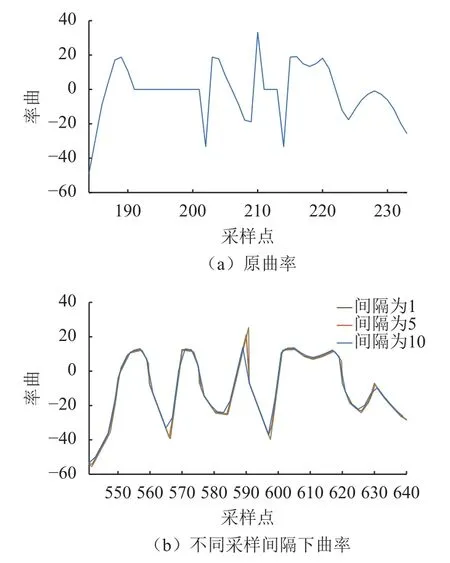
图7 原曲率与采样后曲率Fig.7 Original curvature and sampled curvature.
2.3 归一化互相关匹配
对于两条曲线采样后曲率匹配,采用归一化互相关算法进行相似度计算,计算公式为

其中:f为较短曲线中的一部分,作为模板窗口沿着较长曲线滑动;u为两条曲线的偏移量;为模板内曲率均值;为滑动窗口在第二条曲线上曲率均值;v取值范围为[–1,1],数值越大相似度越高。
为确定两曲线最相似部分,从较短曲线a中截取所有可能曲线段与另一曲线b进行曲率匹配。对于截取的第i条曲线段ci在曲线b上滑动匹配时,将互相关系数最大处(图8 P点)作为曲线段ci与曲线b的匹配度。曲线a上所有可能曲线段完成计算后,将匹配度最高曲线段作为两曲线最相似部分。
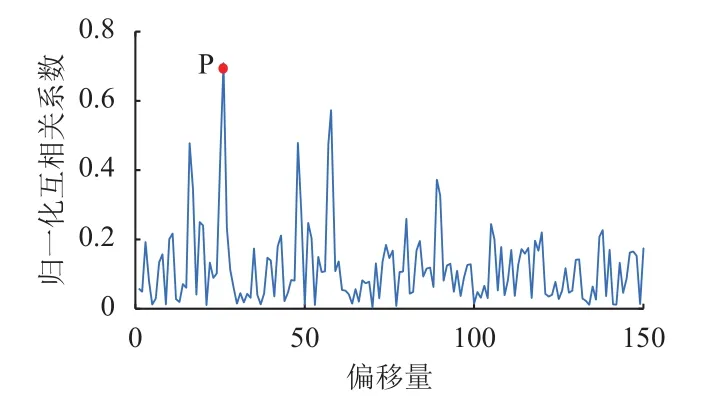
图8 曲线段匹配度Fig.8 Curve segment matching score
对于所有可能曲线段进行匹配时,曲线段越短通常相关系数越大,直接利用归一化互相关系数暴力匹配,计算量大且得到的大多是长度短、难以利用的曲线如图9所示。
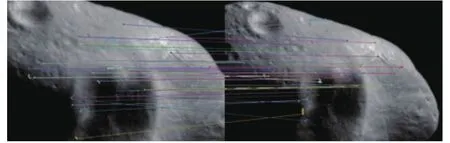
图9 暴力匹配结果Fig.9 Brute force match results
为提高匹配效果并减小计算量采取以下策略。
1)设置曲线段长度与步长
精准匹配时对曲线a中所有曲线段进行互相关计算效率较低。经多次试验,设置步长与截取曲线长度为

其中:step为步长;nj为截取曲线长度;A为截取曲线长度集合;ns为曲线a长度。
2)修改曲线段匹配度计算方式
考虑到曲线长度较长时,计算所得相关系数一般较低,为获得较长曲线匹配结果,计算匹配得分时加入曲线长度作为权重系数

其中:S为匹配结果最终得分;L为曲线段c的长度。
设曲线a长度为ns与b长度为nl,暴力匹配方法截取曲线长度nj∈[1,ns],此时匹配计算复杂度
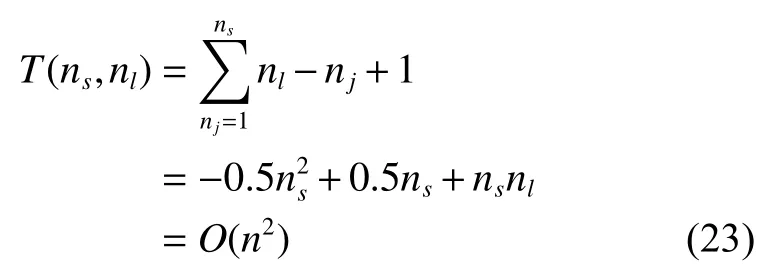
采取两策略后,匹配时间复杂度为
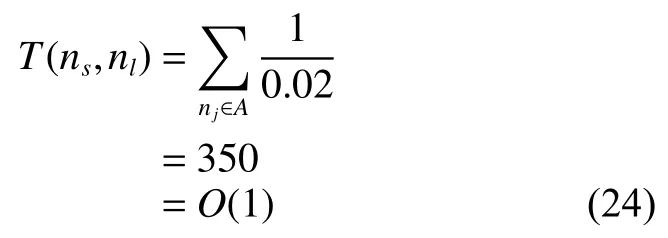
比较式(23)与式(24)可知,匹配时间复杂度最高次项由2次降为0次,计算量大幅减少,同时匹配效果得到提升如图10所示。
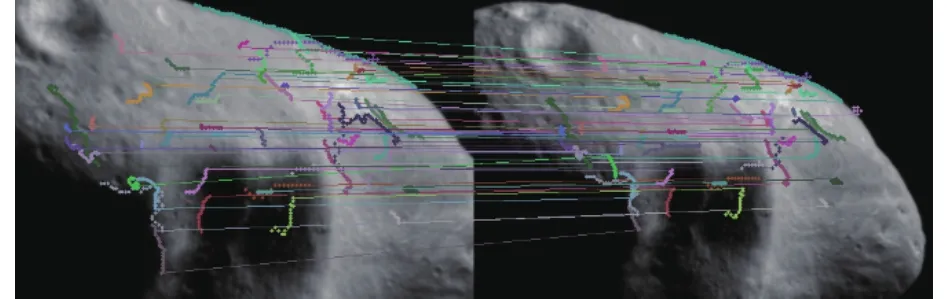
图10 采取策略后匹配结果Fig.10 The matching result after adopting strategies.
3 实验结果分析
对于本文提出的曲线精准匹配算法,从时间复杂度与精准匹配率两方面进行分析。
曲线匹配时间与硬件环境密切相关,因此使用算法执行所需要的计算工作量即时间复杂度来进行比较。基于描述符进行曲线匹配时,采用最近邻比率原则,需要找到最近邻和次近邻匹配项,设两匹配图像提取到的曲线数分别为n1与n2,则描述符匹配时间复杂度为

如2.3节中所述,在曲率匹配中一对曲线计算时间复杂度为O(1),则曲率匹配总体时间复杂度为

其中nd为基于描述符匹配得到的匹配曲线对数。
将描述符与曲率结合后算法时间复杂度为

比较式(25)、式(26)、式(27)可得,在基于描述符匹配基础上,加入曲率匹配后时间复杂度仍然为O(n2)。本文提出曲线精准匹配算法与基于描述符的匹配算法相比,算法时间复杂度保持不变。
在精准匹配率方面,由于探测器下降阶段,图像纹理特征会发生缩放、旋转及光照变换,故分别在3种情况下进行实验。为评价不同变换下曲线精准匹配效果,对匹配曲线进行离散弗雷歇距离计算[22]。对于2条匹配曲线,根据两者长度之比设置采样间隔,得到长度相等的两曲线A、B。之后通过旋转、平移将两曲线端点重合如图11所示。
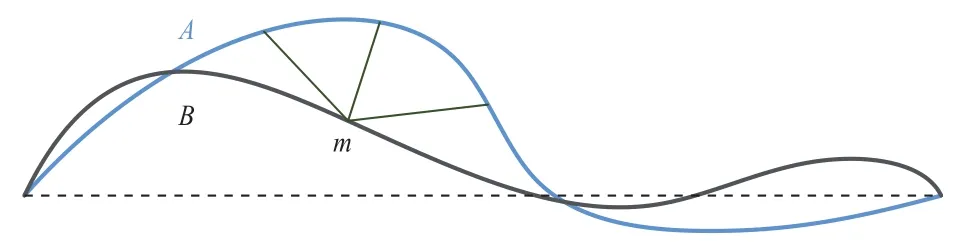
图11 弗雷歇距离计算Fig.11 Fréchet distance calculation.
计算两曲线弗雷歇距离时,对于曲线B上一点m,计算该点到曲线A上各点欧氏距离,将所有欧氏距离中最小值作为候选弗雷歇距离。对曲线B中各点完成计算后,将候选弗雷歇距离最大值作为曲线A与曲线B的弗雷歇距离。经实验,在评估时将弗雷歇距离小于5的结果作为精准匹配。
实验所用为从NASA官网得到的真实小天体图像。图12为尺度、旋转与光照变换下描述符匹配算法实验结果,表1为3种变换下相应精准匹配率。结合图12与表1可知,基于描述符匹配算法在尺度与旋转变换下精准匹配效果较差。
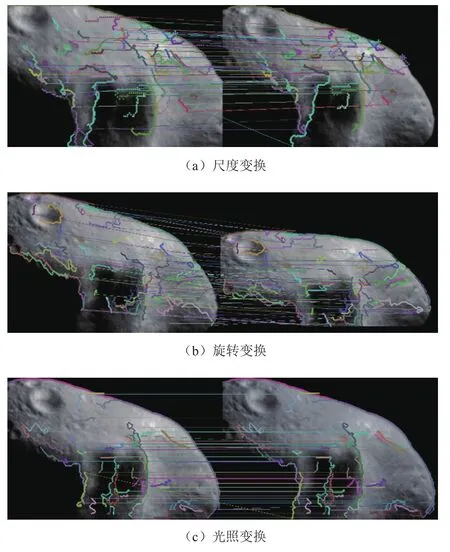
图12 不同变换下描述符匹配算法实验结果Fig.12 The experimental results of descriptor matching algorithm under different transformations

表1 不同变换下描述符匹配算法精准匹配率Table 1 The accurate matching rate of descriptor matching algorithm under different transformations
图13~15展示了尺度、旋转与光照变换下本文所述曲线精准匹配算法实验结果,表2为3种变换下相应精准匹配率。结合图13~15与表2可以看出,在尺度、旋转与光照变换下,本文描述的描述符与曲率相结合的曲线精准匹配算法可以达到84%以上精准匹配率。

表2 不同变换下精准匹配率Table 2 The accurate matching rate under different transformations
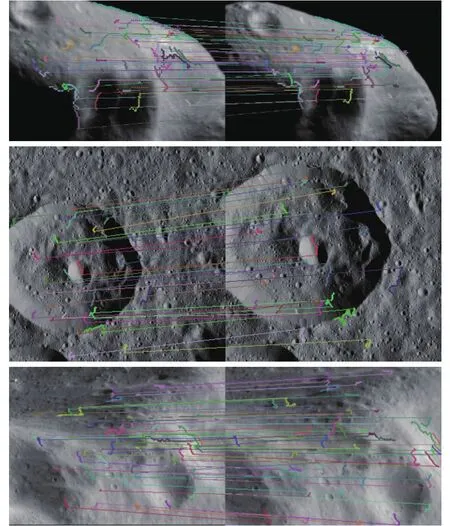
图13 尺度变换下实验结果Fig.13 The experiment results with scale variation
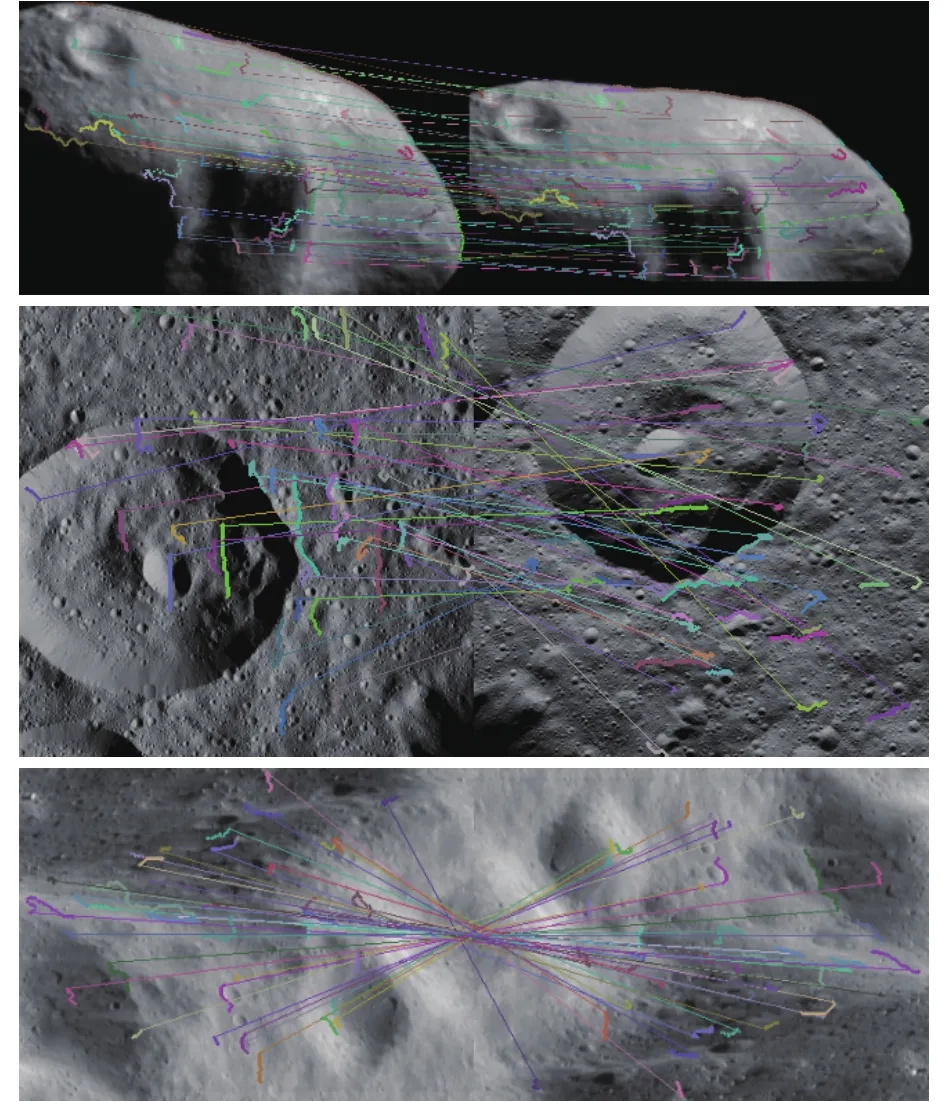
图14 旋转变换下实验结果Fig.14 Matching score with illumination variation
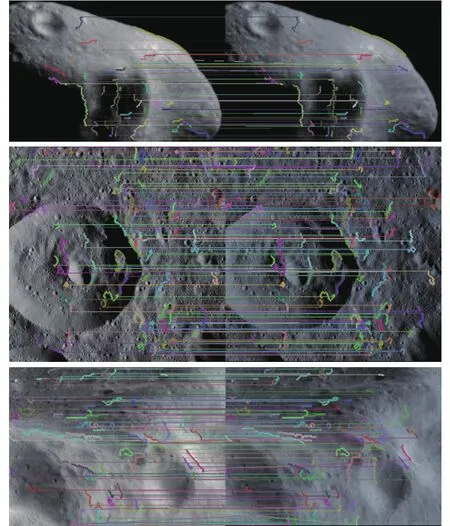
图15 光照亮度变换下实验结果Fig.15 The experiment results with illumination variation
4 结 论
针对曲线描述符难以精准匹配、曲率匹配仅能处理两条曲线的问题,本文提出一种将两者相结合的曲线精准匹配算法,主要包括曲线提取、描述符匹配与曲率匹配3部分。曲线提取部分根据Edge Drawing算法进行边缘曲线检测;描述符匹配部分对曲线及周围支撑区域信息进行描述,根据最近邻距离比率原则完成粗匹配;曲率匹配部分根据无符号曲率积分对曲率曲线重采样,并根据归一化互相关算法完成曲线精准匹配。实验结果表明,本文提出的算法可以达到84%以上的精准匹配率。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28 05:28:26
数学物理学报(2022年4期)2022-08-22 04:07:52
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14 03:54:42
测绘学报(2022年12期)2022-02-13 09:13:01
数学物理学报(2019年5期)2019-11-29 07:46:28
数字通信世界(2018年1期)2018-04-18 11:05:22
制造技术与机床(2017年7期)2018-01-19 02:30:00
软件(2017年6期)2017-09-23 20:56:27
计算机测量与控制(2017年6期)2017-07-01 16:24:14
测绘科学与工程(2017年5期)2017-05-07 06:30:44