
基于螺旋理论的可变刚度机械臂关节研究
2021-08-28 09:49陈龙凯张帆蒋家鹏于潇潇吴凯宇
农业装备与车辆工程 2021年8期
陈龙凯,张帆,蒋家鹏,于潇潇,吴凯宇
(1.201620 上海市 上海工程技术大学 机械与汽车工程学院;2.201620 上海市 上海工程技术大学 机器人智能控制实验室)
0 引言
手术机器人在手术过程中,末端手术器械要进入病人体内,所以,要防止手术器械对病人身体进行额外的破坏[1],希望手术器械在到达指定位姿后,前端的机械臂关节能够进行有效的锁紧,以保证末端手术器械的稳定。因此,对机械臂关节进行研究很有意义。
目前,手术机器人关节常用的锁紧方式有液压锁紧、偏心锁紧和电磁锁紧。北航机器人研究所在对手术机器人的研究中采用了3 种锁紧机构:一种是电磁离合器锁紧机构。通过离合器的开合实现关节的松弛与锁紧[2-4],但是由于电磁离合器的体积大,不适于手术机器人机械臂上使用;另一种则是弹簧锁紧机构。这种装置利用弹簧拉紧外圈,通过外圈与摩擦片抱死的方式实现锁紧,但弹簧长久使用,摩擦力不能保证恒定;第3 种通过液压锁紧装置来实现关节的锁紧。液压装置一般用于机床、大型起重设备,而且对于手术环境不能够保证。针对上述问题,本文提出了一种可实现锁紧的机械臂关节,通过ADAMS仿真验证和3D 打印件进行分析验证,最终确定该关节的可行性。
1 关节机构描述
1.1 设计原则
机构约束螺旋系。关节具有一个转动自由度,通过机构的运动螺旋系,求解反螺旋得到关节机构的约束螺旋系为5 系。
(2)分支约束螺旋系。由机构的约束螺旋系可计算分支的约束螺旋系,机构的约束螺旋系由2 条并行支链提供,机构约束力为各支链的末端约束力的并集。右侧支链具有5 个约束力,左侧分支的约束力不能超出该范围[5]。
1.2 关节构型介绍
所提出的关节模型如图1 所示,由上平台、下平台和2 条分支链所组成。其中,左侧支链由依次连接的6 个转动副和连接各转动副之间的连杆组成,两端的连杆与上下平台固连;右侧支链由一个转动副和连杆组成。两端的连杆同样与上下平台固连,其中,左右两侧支链均有一个主动运动副,其余均为被动副。
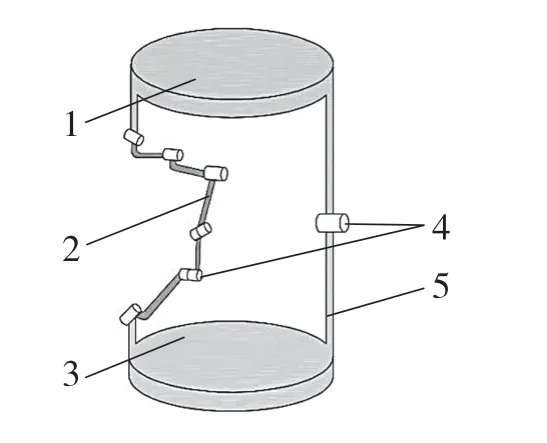
图1 关节三维模型Fig.1 Three-dimensional model of joints
1.3 锁紧条件
具体实现方式如图2 所示。首先假设Ri表示第i 个转动副,在初始位姿时,R1,R3,R6三个转动副的轴线空间汇交于一点,且于R7的轴线的延长线上,左右两条支链相当于同轴转动,此时,关节可以转动。当主动转动副R2驱动时,改变转动副R3的轴线,此时的R1,R3,R6三个转动副的轴线不再汇交,即左右两条支链不再同轴,由于约束力的变化,主动力做功的改变,导致关节处于锁紧状态。
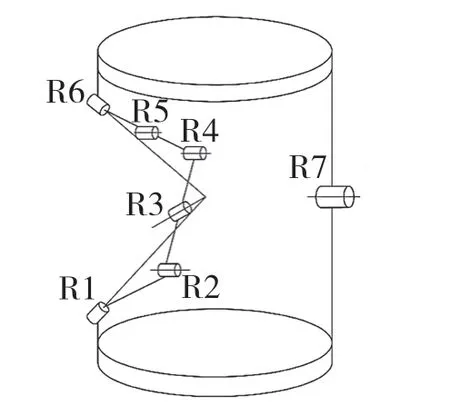
图2 关节结构CAD 简图Fig.2 CAD sketch of joint structure
2 机构的可动性研究
为了便于问题分析,建立坐标系 如图3所示。其中,坐标原点o 为R1和R6轴线的交点,x 轴沿着R3轴线的方向,y 轴沿着R7轴线方向,z 轴遵循右手定则。
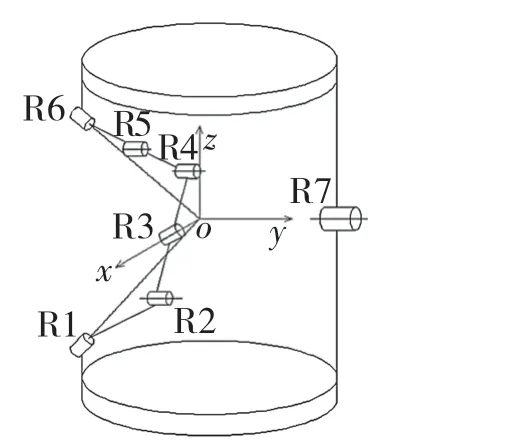
图3 机构坐标示意图Fig.3 Schematic diagram of mechanism coordinates
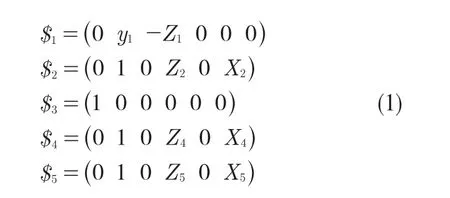
在此设R1,R3,R6三个转动副的轴线空间汇交于一点时为姿态1,当R1,R3,R6三个转动副的轴线空间不再汇交于一点时,为姿态2。在姿态1 时,关节左侧支链的运动螺旋系可表示为
动平台的速度可表示为

同时可以看到,上述6个旋量的Plücker坐标,第5 列元素均为0,该旋量集的秩为5。左侧支链存在的6 个旋量线性相关[6],必有一组非全为0 的使得动平台的速度有如下关系:

机构可动的充要条件是其支链上的所有旋量线性相关[7],其中R2可由R1,R3,R4,R5,R6线性表示。左侧支链的运动不会引起动平台的运动。
由式(1)可知,左侧分支的运动螺旋系为5 系,该分支对动平台的运动提供一个约束螺旋为

式(4)表明,左侧支链的约束螺旋系仅包含沿y 轴方向的约束力,即该分支限制了动平台沿y 轴移动的自由度。
右侧分支提供固定约束,运动螺旋系可表示为

该分支的运动螺旋系为1 系,那么约束螺旋系为5 系。由互易积理论有
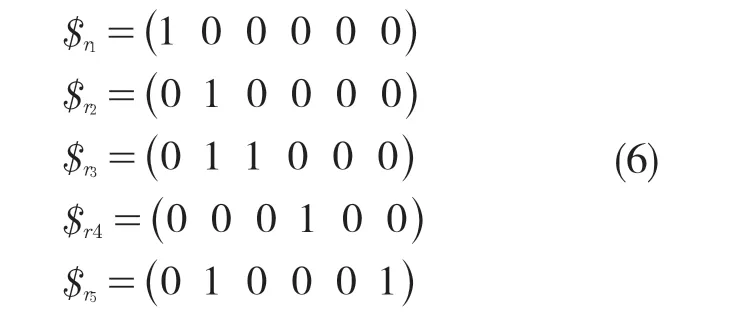
式(6)表明,右侧支链的约束螺旋系包含3 个轴线互相垂直的约束力和两个分别垂直于xoy 面和yoz 面的约束力偶,即该分支约束了动平台空间内的3 个移动自由度和两个垂直于xoy面和yoz 面的转动自由度。并联机构的自由度可利用修正Grubler-Kutzbach 公式进行计算[8],即

式中:M——机构的自由度数;λ——机构的阶数;n——机构的构件总数;g——机构运动副总数;fi——第i 个运动副的自由度数;μ——冗余约束数;ξ——局部自由度数。
对于图3 所示机构,姿态1 时:λ=6,n=7,g=7,,μ=0,ξ=0,代入式(7)得该机构自由度M=1。
动平台的约束为两条支链的交集,在姿态1时,机构的动平台仅含有一个沿y 轴转动的自由度;姿态2 时,即在R2的驱动后,R3的轴线发生变化,此时,R1的轴线、R3的轴线和R6的轴线不再汇交。R3对应的运动螺旋可表示为

此时,提供固定约束的R7与R1,R3,R4,R5,R6线性无关,左侧支链不参与运动,故当R2和R7同时驱动时,即R3转动副的轴线发生改变时,关节不满足转动要求,可达到有效锁紧能力。
3 ADAMS 仿真
在ADAMS 中建立模型,上下关节均采用相同圆柱体简化,其中下关节用固定副固定在大地上,各连杆之间通过转动副连接,各连杆之间的几何位置关系跟上文表述一致。其中,模型中的细圆杆为各转动副的轴线方向,设置仿真时间为3 s;R2主动副对应的驱动函数:STEP(time,0,0d,2,0d)-STEP(time,2,0d,3,30d);R7主动副对应的驱动函数为:30.0d×time。具体参数见表1。
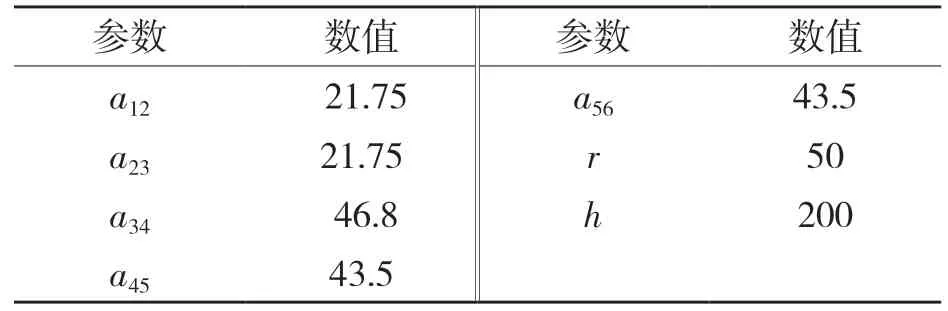
表1 机构的结构参数Tab.1 Structural parameters of mechanism
表1 中:aij——第i 个转动副与第j 个转动副之间连杆的长度;r——上、下关节的半径;h——上、下关节之间的高度。
在位姿1,即R1,R3,R6的转动副轴线汇交于一点时,仅有R7主动副驱动时,关节只含有一个绕y 轴的转动自由度,此处只考虑上关节在x 轴方向的运动,分别测量了质心点在x 轴方向的运动情况,如图4、图5 所示。
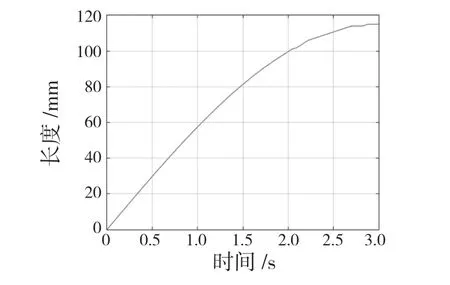
图4 质心点在x 轴方向的位移曲线Fig.4 Displacement curve of centroid point in x-axis direction
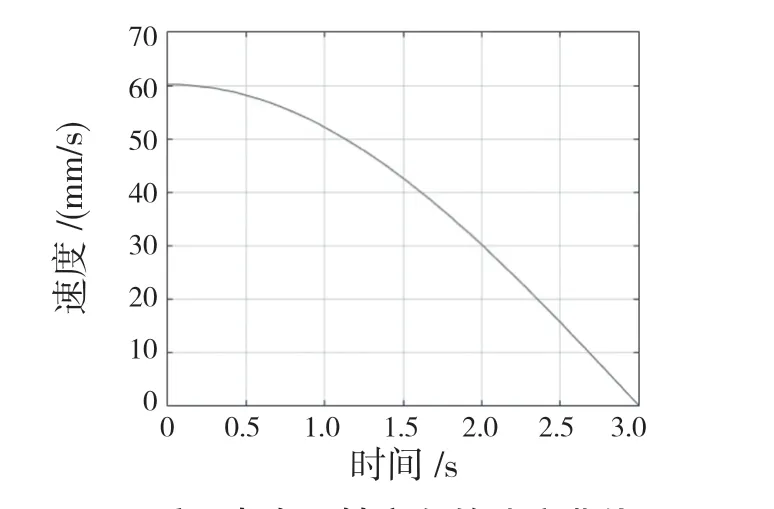
图5 质心点在x 轴方向的速度曲线Fig.5 Velocity curve of centroid point in x-axis direction
当R2和R7主动副共同驱动时,即0~2 s 时间内,第3 转动副的轴线未改变,2 s 后,第3转动副的轴线开始发生变化。上关节质心点在0~3 s 内的运动情况如图6、图7 所示
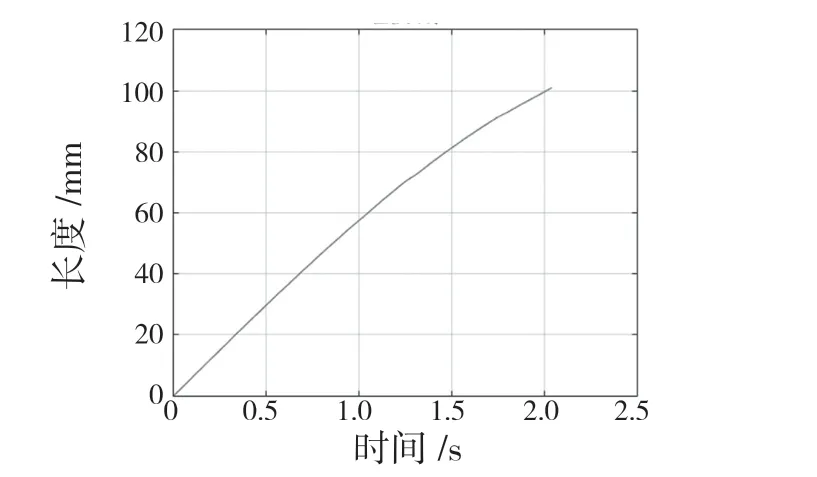
图6 质心点在x 轴方向的位移曲线Fig.6 Displacement curve of centroid point in x-axis direction
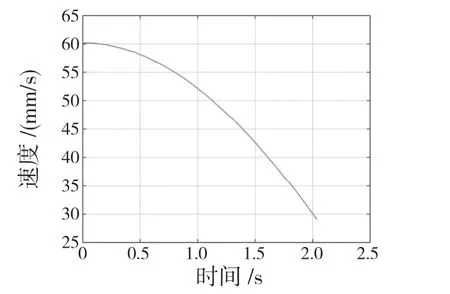
图7 质心点在x 轴方向的速度曲线Fig.7 Velocity curve of centroid point in x-axis direction
从上述的测量曲线可以发现,在只有R7驱动时,整个关节可以转动到仿真结束,但是在R2和R7共同驱动时,在2 s 后仿真便结束。实质上在0~2 s 时,主动副R2在0~2 s 不起作用,等价于R7主动副单独驱动;在2~3 s 时,属于R2和R7共同驱动。R2主动副一旦驱动,R3的轴线将发生变化,此时关节的位姿从姿态1 转变到位姿2,所以此时机构不可动,仿真结束。ADAMS 运动学仿真与上文中的理论分析完全吻合,该关节可以实现相邻关节之间的有效锁紧。
4 实验验证
建立三维模型如图1 所示,并打印分析。如图8 所示,下关节固定在实验平台上,在模型的右支链与上关节连接处系细绳,通过绳子系住不同质量的砝码(分别为30,40,50 g)。
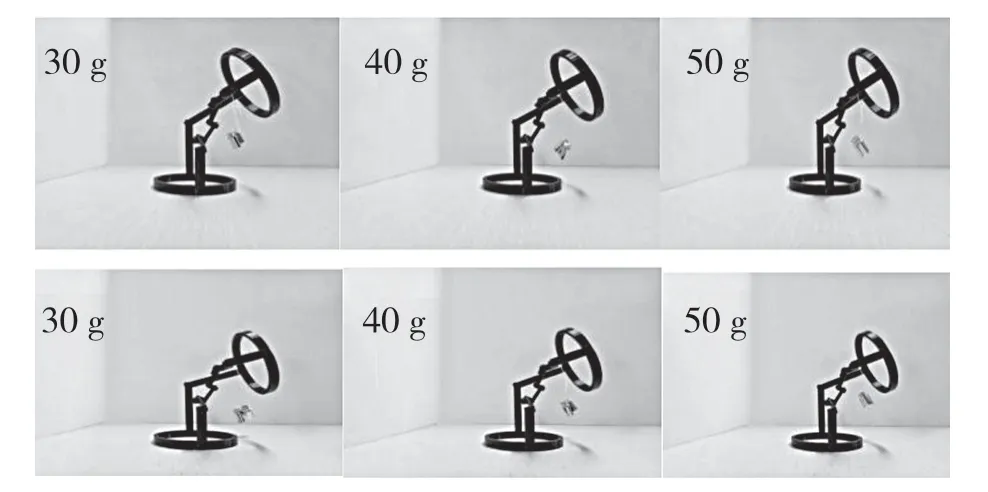
图8 姿态2 不同转角下关节的负载实验Fig.8 Joint load experiment at different rotation angles in posture 2
让砝码在重力作用下自然下垂,进行负重实验,在两处不同的锁紧状态下(135°和120°)均可承受一定的载荷,可以证明关节能够实现不同转角下的有效锁紧。
5 结论
本文中提出了一种可进行有效锁紧的机械臂关节。通过螺旋理论对关节的两种姿态进行分析,线性相关性分析关节的可动性,确定关节的转动与锁死两种状态,建立ADAMS 模型进行运动学仿真。最终对3D 打印件在锁死状态下进行负重实验,可以进行少重量的负重,证明该关节机构可以实现关节的有效锁紧。
猜你喜欢
农业机械学报(2021年10期)2021-11-09
北京测绘(2021年7期)2021-07-28
计算机应用与软件(2021年2期)2021-02-25
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
北京航空航天大学学报(2019年3期)2019-04-08
山东青年(2016年10期)2017-02-13
中国市场(2016年31期)2016-12-19
商场现代化(2016年3期)2016-04-08
小学教学参考(综合)(2016年1期)2016-01-29
