
基于毫米波雷达的车辆自动紧急制动安全系统研究
2021-08-28 09:49刘景锋李炎亮沈骏黄孝慈
农业装备与车辆工程 2021年8期
刘景锋,李炎亮,沈骏,黄孝慈
(200093 上海市 上海工程技术大学 机械与汽车工程学院)
0 引言
为提高汽车行驶安全,各种主动安全技术出现,如碰撞预警、车道保持和车身稳定等,各种新型传感器技术为主动安全提供了技术可行性。
目前,主动安全技术采用的传感器方案有单传感器和多传感器数据融合等,通过传感器探测目标并进行跟踪。其中,毫米波雷达传感器是基于多普勒效应,通过发出啁啾信号测量目标的距离、速度和方位角等状态[1]。高振海[2]等人采用毫米波雷达并结合自适应卡尔曼滤波器,估计了前方车辆运动状态,被测车辆在25 km/h 的速度下行驶,速度预测结果与实际值平均相对误差在0.5 km/h 以内。其它研究则集中在融合视觉和雷达信号跟踪车辆前方目标[3-5],其先通过雷达获取到车辆位置,再快速分割视觉图像进行识别。其中,赵望宇[5]等人针对毫米波雷达信号,利用层次聚类方法区分了目标运动状态。针对自动碰撞系统的控制策略,有安全距离控制模型和碰撞时间控制等[6-7]。其中,文献[6]搭建了基于碰撞时间的倒数的控制模型并进行仿真;杨明亮[8]等人则融合多传感器设计了车辆行驶时的换道策略。
针对车辆防碰撞中目标跟踪和车辆的状态控制,本文采用大陆集团的ARS408-21 车用77 GHz 前向毫米波雷达,并结合车辆控制器,设计并实现了雷达测距防碰撞安全系统。利用毫米波雷达进行测量追踪多个目标物,在目标距离车辆较近时自动控制车辆进行制动。
1 自动制动系统方案
本文研发的自动紧急制动安全系统安装在一台非道路车辆上,该车辆运行在某企业的封闭园区环境下,且车辆行驶速度较慢。图1 所示为整个系统架构图。系统由毫米波雷达、工控机和车辆控制器等3 部分组成。一般汽车雷达主要使用24,77 GHz 两个不同的信号频段,前者雷达频段需要使用至少是后者3 倍的信号天线,故使用77 GHz 的雷达,较小尺寸,更利于在车辆上安装[1]。系统中ARS408 毫米波雷达用于感知前方目标状态,并通过CAN 总线输出目标信息至工控机。工控机根据毫米波雷达发送过来的信号,将信号进行处理并做出合理决策控制车辆。工控机做出的决策再由CAN 总线输出至整车控制器,整车控制器收到控制信息后进而控制车辆执行加速、减速和制动等动作。
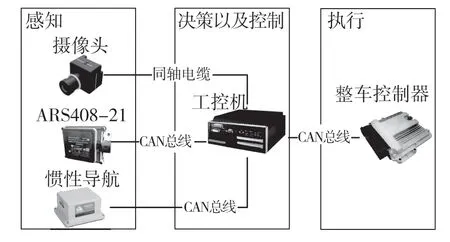
图1 自动紧急制动系统框图Fig.1 Block diagram of automatic emergency braking system
ARS408 毫米波雷达固定在车辆前保险杠的中间位置,在车辆后方看雷达的插接器朝向车辆左侧,如图2 所示。其它硬件设备安装在车厢内,其中工控机的CPU 为Intel 的i5-6440,并搭载Ubuntu16.04 的Linux 操作系统,选用Linux 系统则是利用了其开源且稳定的特点。
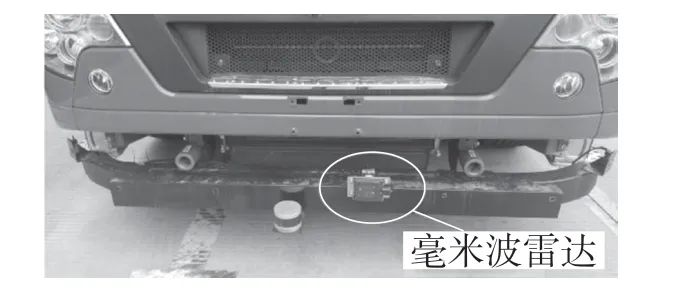
图2 实车测试平台Fig.2 Real vehicle experimental platform
2 雷达信号采集及处理
2.1 雷达扫描范围
采用ARS408 毫米波雷达是因为该雷达可以进行0.25~70 m 范围内的近距离扫描和0.25~250 m 范围内的远距离扫描,其扫描角度分别为±60°和±9°。雷达在每50 ms 采样周期内通过交替发送不同频率的啁啾信号完成短距离和长距离扫描。该雷达实现远近距离两种扫描范围依赖于信号发送(TX)天线和信号接收(RX)天线,天线数量分别有2 个TX 天线和6 个RX 天线。由毫米波雷达测距原理可知,当目标接近雷达平面时,反射信号频率将高于发射信号频率;反之,当目标远离雷达平面时,反射信号频率将低于发射频率。经过计算差值信号可以得出目标物体速度、距离和方位角等信息。如图3 所示,车辆A为装有自动紧急制动系统的车辆,目标B 为雷达所能探测到的物体。
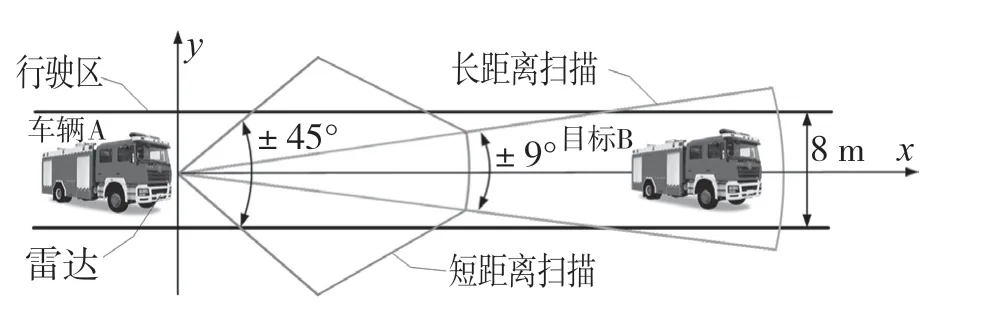
图3 毫米波雷达测量范围图Fig.3 Millimeter wave radar measurement range map
2.2 目标物筛选方法
在毫米波雷达探测范围内,单个测量周期雷达最多可通过CAN 总线传输255 个目标的状态信息,被追踪的目标雷达会在下一周期内再次发送,直到目标消失为止。每个目标雷达都可以给定ID 号。例如,检测到的第一个目标ID 为0,则其它目标的ID 依次排序;如果其中某个目标在雷达扫描范围内消失,则其ID 会重新分配给其它新出现目标并发出ID 变更报告。
如图2 所示,雷达安装在车辆前部中心位置,垂直于雷达前平面即车辆前进方向的设为纵向x;平行于雷达前平面设为横向y,其中雷达左侧为正数,右侧为负数。本次研发的系统安装的车辆运行速度不超过20 km/h,且车辆运行的车道宽度在的8 m 左右,雷达能够扫描到的目标所在区域大于车辆行驶的范围,故可通过横向和纵向距离对目标进行约束以剔除不对车辆造成危险的目标。进行筛选后的目标应该满足式(1):

3 制动安全车距模型
在初步筛选出危险目标B 后,车辆A 与目标B 之间的前后距离是车辆行驶时需关注的问题,通过式(1)筛选出的目标在与车辆A 间的距离小于某值时将对车辆行驶构成威胁,车辆A 发现前方危险目标B 后进行紧急制动的制动安全距离模型为

式中:SA——车辆A 开始制动时与目标B 的临界值;vA,vB——车辆A 和目标B 的速度;aA——车辆减速度;aB——毫米波雷达检测到目标B 的加速度;vrel——车辆A 和目标B 的相对速度;ts——控制系统到执行系统的延迟时间;d0——车辆A 停车后与目标B 的距离,其保证了两者之间的安全。
本次研发的系统所搭载的车辆A 行驶速度在20 km/h 左右,车辆的总质量、侧偏刚度和转动惯量等因素影响SA的大小,当SA小于雷达探测的目标B 的距离时,车辆会紧急制动。因受路况等其它因素影响,车辆停车后d0一般在4~6 m之间。
4 试验结果与讨论
4.1 雷达探测结果
为了验证系统效果,在开放场地进行了实车试验,获取了毫米波雷达信号并记录整车速度。如图4 所示为通过CAN 监控工具采集的毫米波雷达的原始信号,包括目标ID、纵向距离x、横向距离y、纵向相对速度和横向相对速度等。
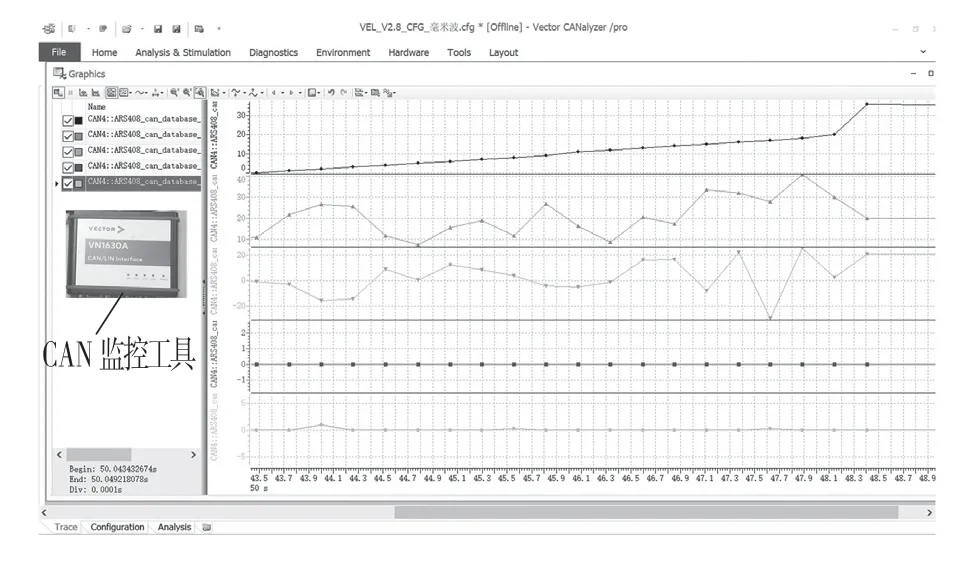
图4 雷达单采样周期信号Fig.4 Radar single sampling period signal
试验时,为了更加直观地看到毫米波雷达检测到的目标,将雷达识别的目标在屏幕中进行显示。通过将目标物体的相对车辆的纵向距离x 和横向距离y 进行比例缩放,直观地展示车辆与目标相对位置。通过50 ms 的刷新频率,屏幕实时显示雷达所能检测到的目标。如图5 和图6 展示了从开始试验至50 s 时雷达单采样周期内目标物鸟瞰图和分布状况。
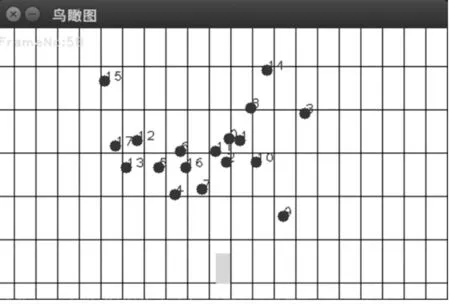
图5 实车测量鸟瞰图Fig.5 Aerial view of real vehicle survey
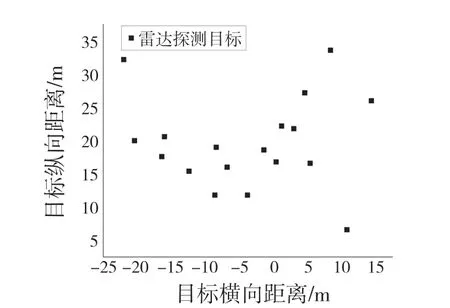
图6 单采样周期内目标分布图Fig.6 Target distribution in a single sampling period
4.2 车速控制结果
如图7 所示,曲线1 为车辆A 离目标B 的距离变化曲线,曲线2 为整车从启动到制动停止后速度变化曲线,曲线3 为工控机根据目标B 距离变化输出给整车控制器的期望车速。从图7 可以看出,目标距离从50 m 左右逐渐减小,整车开始时刻先进行加速,在59.8 s 时,目标与车辆的距离小于20 m,此时,工控机输出的期望车速为0,最终整车3 s 后距离目标5.5 m 时停车。从试验结果可以看出系统达到了设计要求。
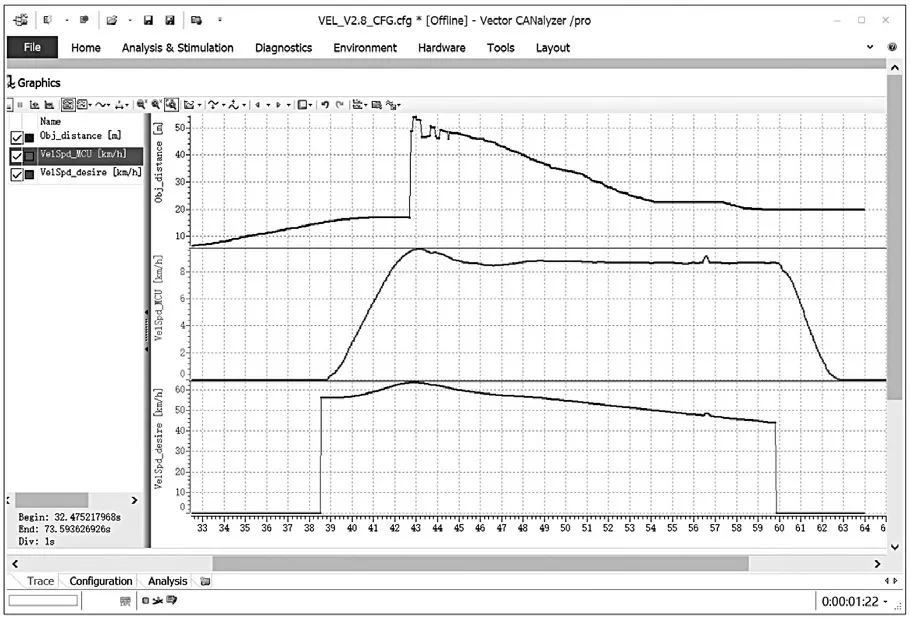
图7 实车车速变化图Fig.7 Change chart of real vehicle speed
5 结论
本文提出了一套用于非道路车辆的自动紧急制动安全系统。系统先对ARS408-21 毫米波雷达原始信号进行过滤,筛选出了对车辆可能产生影响的运动目标,然后通过目标物状态判断车辆是否进行紧急制动。测量结果表明,车辆在低于20 km/h 的时速下系统可以准确探测50 m 范围内的目标,当目标对车辆行驶造成威胁时,自动紧急制动系统能够进行工作,进而将车辆停止在安全距离范围内。
本次研发的系统车辆行驶速度较慢,不能适用于更多工况,需进一步开发可用在时速高于50 km/h 车辆上的系统。
猜你喜欢
电子制作(2019年15期)2019-08-27
航天电子对抗(2019年4期)2019-06-02
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生导刊(2018年34期)2018-12-18
电脑知识与技术(2016年21期)2016-10-18
山东青年(2016年3期)2016-02-28
百科探秘·航空航天(2015年4期)2015-11-07
印刷技术·数字印艺(2015年7期)2015-08-31
现代电子技术(2015年5期)2015-03-31
母子健康(2015年1期)2015-02-28
