
自动驾驶混合交通流的交通和环境效益评估
2021-08-27 00:20胡明伟施小龙翟素云
重庆交通大学学报(自然科学版) 2021年8期
胡明伟,施小龙,翟素云,刘 鹏
(1. 深圳大学 土木与交通工程学院,广东 深圳 518060;2. 深圳大学 滨海城市韧性基础设施教育部重点实验室, 广东深圳 518060; 3. 深圳大学 未来地下城市研究院,广东 深圳 518060; 4. 弘达交通咨询(深圳)有限公司,广东 深圳 518060)
0 引 言
根据国家统计局部门相关统计,2019年底,全国汽车保有量高达2.8亿辆,2013—2019年以年均12%的速率持续增长[1]。机动车保有量的持续增长将加剧交通拥堵、交通事故以及环境污染等城市问题[2],交通管理和交通设计等传统交通改善方法逐渐遭遇瓶颈。近年来,大数据、云计算、5G通信等技术催促下,智能网联车发展迅猛[3]。据自动驾驶技术成熟度曲线(Gartner曲线),自动驾驶呈曲线发展趋势,2013—2017年,单车智能迅速发展,处于期望膨胀期;2018—2020年,由于技术成长与公众期望不匹配,单车智能将迎来低谷期。此期间,车路协同技术将带领单车智能快速度过低谷期;2020—2035年,随着自动驾驶逐渐接受市场的验证,智能车将从复苏期逐渐爬升至成熟期,预计于2035年,实现大规模产业化。Gartner曲线表明,未来道路上将出现自动驾驶车辆和手动驾驶车辆混行,并逐渐过渡到全部自动驾驶车辆的交通状况。针对这种过渡的混合交通流状况,研究评价自动驾驶车辆的交通和环境效益,可以为自动驾驶车辆的政策制定提供指导。
汽车测试是自动驾驶技术研发不可或缺的一个环节。基于实验场地的实车试验是目前自动驾驶车研发的主流平台。2016年11月,美国交通部在密歇根州安娜堡搭建世界上第一个测试自动驾驶汽车技术的试验场,M-City试验场[4]。2018年3月,百度Apollo自动驾驶汽车在实际道路上完成路测。然而,实体车与实体道路测试往往存在成本高、周期长、对底层硬件设备可靠性高度依赖,且有一定安全隐患等问题。这时就凸显了配备有虚拟驾驶环境及各种丰富的虚拟传感器的汽车智能仿真平台的重要性。贺勇等[5]利用PreScan的驾驶仿真搭建了虚拟交通场景,分析自动驾驶相关技术的稳定性; L.CUI等[6]搭建了PreScan仿真平台,用于模拟车联网车辆在网络攻击下的运行状态。
国内外学者在自动驾驶混合交通流特性的研究上已取得一定的进展,涉及混合交通流的稳定性、基本图模型、交通流建模等方面。蒋阳升等[7]用全速度差模型和CACC模拟混合交通流的跟驰特性,对混合交通流的稳定性进行了分析;秦严严等[8-9]应用Newell跟驰模型作为手动驾驶车辆跟驰模型,并利用PATH实验室真车测试标定的模型作为自动驾驶车辆跟驰模型,推导出自动驾驶混合交通流基本图模型,并提出了不同自动驾驶车辆比例下的混合交通流元胞传输模型(CTM)。
机动车尾气排放模型是测算机动车尾气排放污染物的仿真模型,可分为宏观、中观以及微观三种尺度[10],其中MOVES是在国内外的尾气排放测算应用最广泛且更接近实现情况的多尺度排放模型[11]。黄文柯等[12]通过AnyLogic和MOVES耦合模型,研究出行者信息APP提供的实时交通信息对城市空气质量的影响;王亚男[13]采用VISSIM以及MOVES搭建了公交专用道设置对机动车尾气排放影响的量化分析模型;H.ABOU-SENN等[14]通过MOVES和VISSIM的结合,揭示了在高速公路上,交通量、速度、卡车占比、道路坡度和温度对CO2排放的影响;H.PERUGU 等[15]研究MOVES在印度进行轻型机动车排放模拟,提出了修改轻型汽车排放率的方法;F.LIU 等[16]研究了自动驾驶车辆对温室气体排放的影响;P.KOPELIAS等[17]对道路中运行的自动驾驶车辆带来的环境效益进行了综述。
1 建模方法
1.1 方法概述
笔者基于自动驾驶车辆的驾驶行为理论,运用VISSIM软件进行仿真建模,模拟不同市场渗透率的自动驾驶车辆在不同交通流(高峰期、平峰期、低峰期)中的运行过程,并采集路网中车辆的平均速度、路段距离等信息作为MOVES机动车尾气排放模型的数据输入,最后全面评价研究自动驾驶车辆对交通流特征以及交通环境造成的影响。
1.2 人工驾驶车辆行为
目前研究中,模拟人工驾驶车辆的驾驶行为有有刺激-反应类、生理-心理类、安全距离、人工智能类等模型。其中心理-生理模型能够较准确模拟出实际人工驾驶行为,因此笔者选用以Wiedemann模型为基础的微观仿真软件VISSIM,模拟人工驾驶车辆的驾驶行为。Wiedemann模型主要包括适用于车辆跟驰行为的心理-生理模型和适用于车辆横向运动行为描述的规则性模型。
1.3 自动驾驶车辆行为
根据技术路线的不同,自动驾驶车辆的驾驶行为可分为不同的驾驶规则,主要有自适应巡航控制系统(adaptive cruise control,ACC)和协同式自适应巡航控制系统(cooperative adaptive cruise control,CACC)两大类[18]。
ACC算法较简单,直接计算所需的精确加速度以达到最小的安全距离,并且加速度也需要满足期望车头时距。核心算法如式(1)~式(7):
(1)
(2)
(3)
bound(x,y,z)=max(min(x,y),z)
(4)
Ifaself≤asafeandasafe≤0:
(5)
thenanew=bound(aself,amax,amin)
(6)
elseanew=bound(atarget,amax,amin)
(7)
式中:aself为达到最小安全时距的加速度;atarget为达到期望车头时距的加速度;vself为当前车辆的速度;anew为决定的加速度;amax为最大的加速度;amin为最小加速度;vlead为当前车辆前车的速度;sspace为当前的车头间距;hhd为当前的车头时距;hhd,min为最小的安全车头时距 默认为3 s;hhd,target为目标车头时距;bbuffer为最小的安全空间距离;sstep为时间步长,默认为0.1 s。
从ACC和人工驾驶车辆驾驶特性对比角度来看,ACC的运行特性最终通过驾驶员反应时间、安全距离、最小车头间距和变道行为这些驾驶行为参数反映。因此,在VISSIM中对驾驶行为参数的加以设定,从而模拟自动驾驶车辆运行特性和效果。具体设置过程如图1。

图1 自动驾驶车辆驾驶行为参数设置过程Fig. 1 Setting process of driving behavior parameters of autonomousvehicles
笔者的自动驾驶行为模型中,采用了VISSIM中的Wiedemann 99车辆跟驰子模型[19],与其他可用的汽车跟随子模型相比,该模型提供了更多的可修改参数,因此对于调整自动驾驶行为具有更大的灵活性。其中模型的阈值与参数取值关系如式(8)~式(13):
AX=L+CC0
(8)
BX=AX+CC1×v
(9)
式中:AX为静止车辆停车期望距离;BX为最小的安全跟驰距离;L为前车车身长度;若后车的行驶速度小于前车速度,v为后车速度,否则为前车速度。
SDX=BX+CC2
(10)
(11)
(12)
(13)
式中:SDX为跟驰过程中驾驶员意识到距离变大的阈值;SDV为距离较大时速度差的阈值,表示驾驶员意识到正在接近一辆低速行驶车辆的速度差临界点;CLDV为前后车距离变小时,驾驶员意识到很小的速度差并且距离减小的阈值,是区分跟驰车辆处于逼近前车和跟驰驾驶的重要阈值;OPDV在前后车距离变小时,驾驶员意识到很小的速度差并且距离增大的阈值;Δx为车头时距;δ取值为1或0。
此外,仿真模型中还具有可以更改的车辆换道参数。笔者调研了10个被认为最能代表自动驾驶行为的参数,包含8个跟车参数和2个换道参数[20]。按图1中自动驾驶车辆驾驶行为参数设置流程,多次试验标定得到10个参数值,如表1。
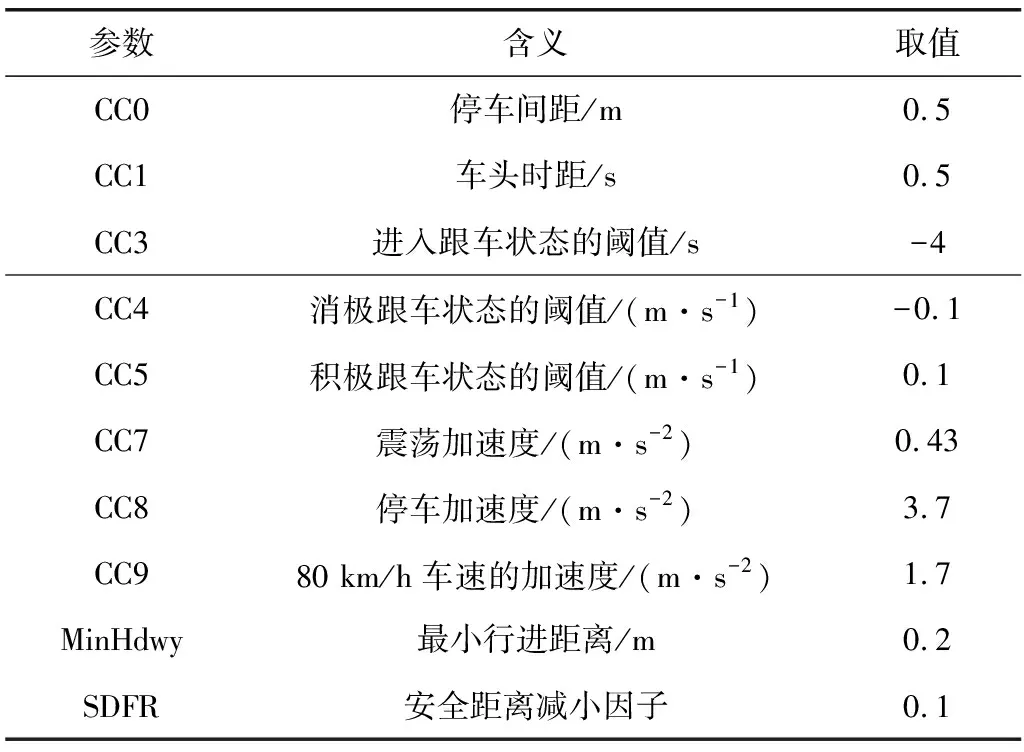
表1 自动驾驶车辆驾驶行为参数Table 1 Driving behavior parameters of autonomous vehicles
1.4 微观交通仿真模型
利用VISSIM搭建微观交通仿真模型主要包括交通环境搭建、交通流输入、交通参数配置、仿真运行4个步骤。交通环境搭建的主要是通过加载背景图作为仿真布局,添加路网模块,车辆输入,交叉口控制模块,根据实际情况为对应的交通环境模块设置其属性。交通参数设置中的自动驾驶行为参数设置,主要是利用VISSIM仿真软件提供的二次开发COM接口完成对车辆的控制。通过Python编程语言完成式(1)~ 式(7)中的ACC规则核心算法、ACC换道行为模型以及表1的自动驾驶车辆行为参数的输入,从而完成ACC模块的开发。主要仿真流程如图2。

图2 VISSIM仿真流程Fig. 2 Flowchart of VISSIM simulation
1.5 机动车尾气排放模型
笔者采用MOVES微观尺度(Project level)建立机动车排放模型。其运算和计算如式(14):
Tp,s=(∑Ep,b×Ac,b)×Aj,p
(14)
式中:T为机动车总排放量;p为机动车排放过程;s为排放源类型;b为排放源和工况区间;E为排放速率;Ac,b为行驶特征;Aj,p为调整因子。
构建MOVES排放模型主要有3个步骤:①RunSpec面板参数设置;②在数据管理器(MOVES project data manager)中创建一个微观层面的数据库,来输入交通仿真软件VISSIM模型输出的数据以及其他参数。其中交通仿真输出的数据主要有车辆组成及其分布,自动驾驶车辆比例,路段长度,路段流量,路段平均速度等。VISSIM微观仿真模型和MOVES排放模型的耦合测算步骤如图3,其他参数如具有区域特征的信息(如气象条件)则需要根据深圳市的实际情况进行本地化;③经过模型测算后,输出尾气排放清单结果,存储在MySQL数据库中。
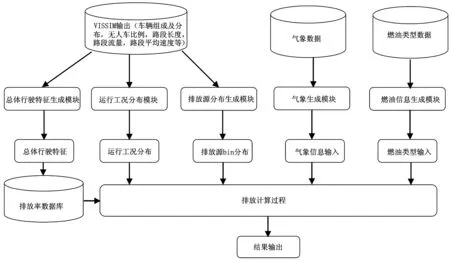
图3 VISSIM仿真和MOVES排放模型的耦合测算步骤Fig. 3 Coupling calculation steps of VISSIM simulation and MOVES emission model
2 案例研究
为更加准确研究自动驾驶车辆对城市交通和环境效益的影响,笔者选取了典型的快速路交织区进行实例研究,以深圳市滨海大道及滨海大道辅路交织区为例,如图4,有1条东西走向的快速路,分流合流辅路各1条。快走路中1条车道设计通行能力为1 200 veh/h,一条辅路车道设计通行能力为600 veh/h,实验设计高峰期、平峰期和低峰期3个不同时段的具体车流量如表2。

图4 仿真路网示意Fig. 4 Schematic diagram of the simulated road network

表2 不同时段(高峰期、平峰期、低峰期)车流量Table 2 Traffic volume during different periods (peak, flat peak andlow peak period) veh/h
按照微观交通仿真模型的具体建模步骤,设置路网的仿真时长为5 400 s。为使仿真符合实际情况,仿真时长被细分为较小的时间段,包括1 800 s的预热和4个900 s的增量时间。这个时间分割模式,可让仿真模型捕获到周期内需求的时间变化及对交通运营的影响,如堵塞,队列传播和耗散。在交通仿真中控制车辆构成,设重型车占比5%,剩下95%占中构建的自动驾驶车辆的占比从0~100%(步长为10%),并根据表1中自动驾驶车辆和传统车辆的驾驶行为参数设置驾驶特性,建立仿真模型。最后根据表2中不同时段的车流量进行输入,建立交通网络微观仿真,以评估不同比例的自动驾驶车辆在交通效益上带来的变化。
利用MOVES软件中微观尺度进行机动车尾气排放模型的搭建,排放模型的本地化参数及输出指标如表3。
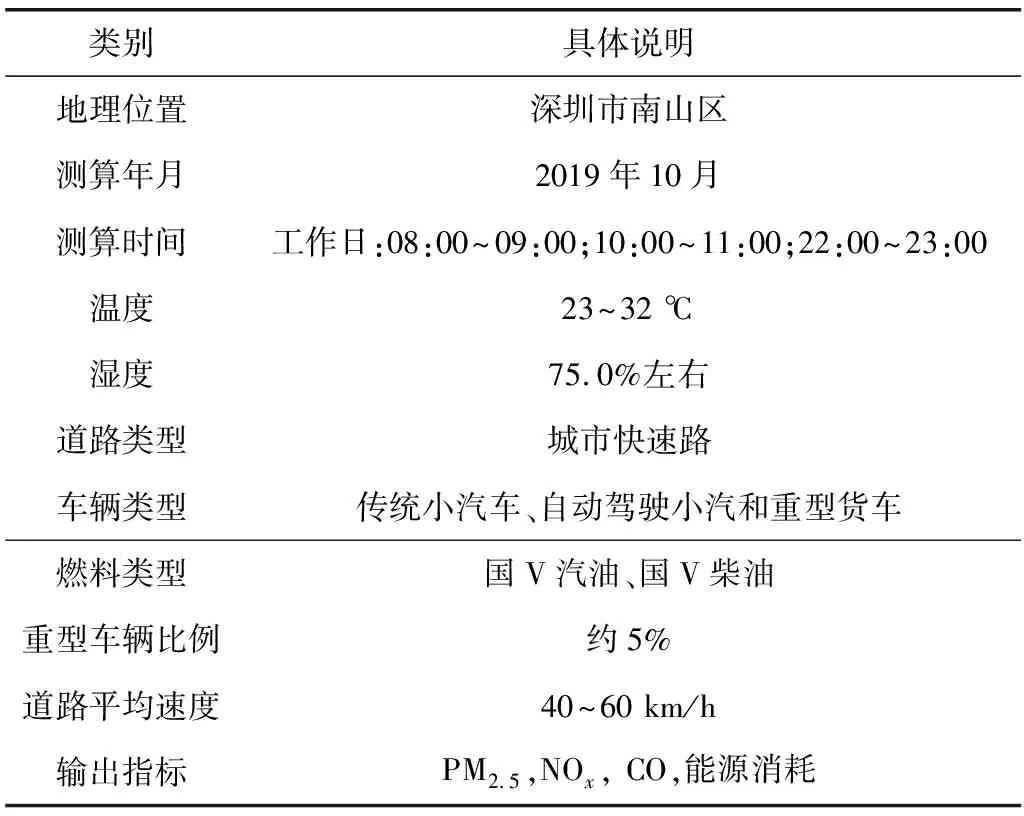
表3 MOVES研究案例参数汇总Table 3 Summary of MOVES project-level parameters
3 结果与讨论
通过笔者搭建的综合仿真体系,模拟仿真了不同比例的自动驾驶车辆在不同交通流(高峰期、平峰期、低峰期)中的运行过程。基于仿真运行的数据,交通效益以平均速度、平均停车次数、平均延误以及总出行时间进行评价研究,环境效益则选取NOx、PM2.5、CO污染物排放量和能源消耗量为研究指标[12]。
3.1 交通效益
混合交通流中的自动驾驶车辆,整体上有助于交通效益提升,且随着其占比增加,交通效益呈稳定线性上升趋势,如表4。由表4可知,自动驾驶车辆对于交通效益的作用,高峰期明显优于平峰期和低峰期。
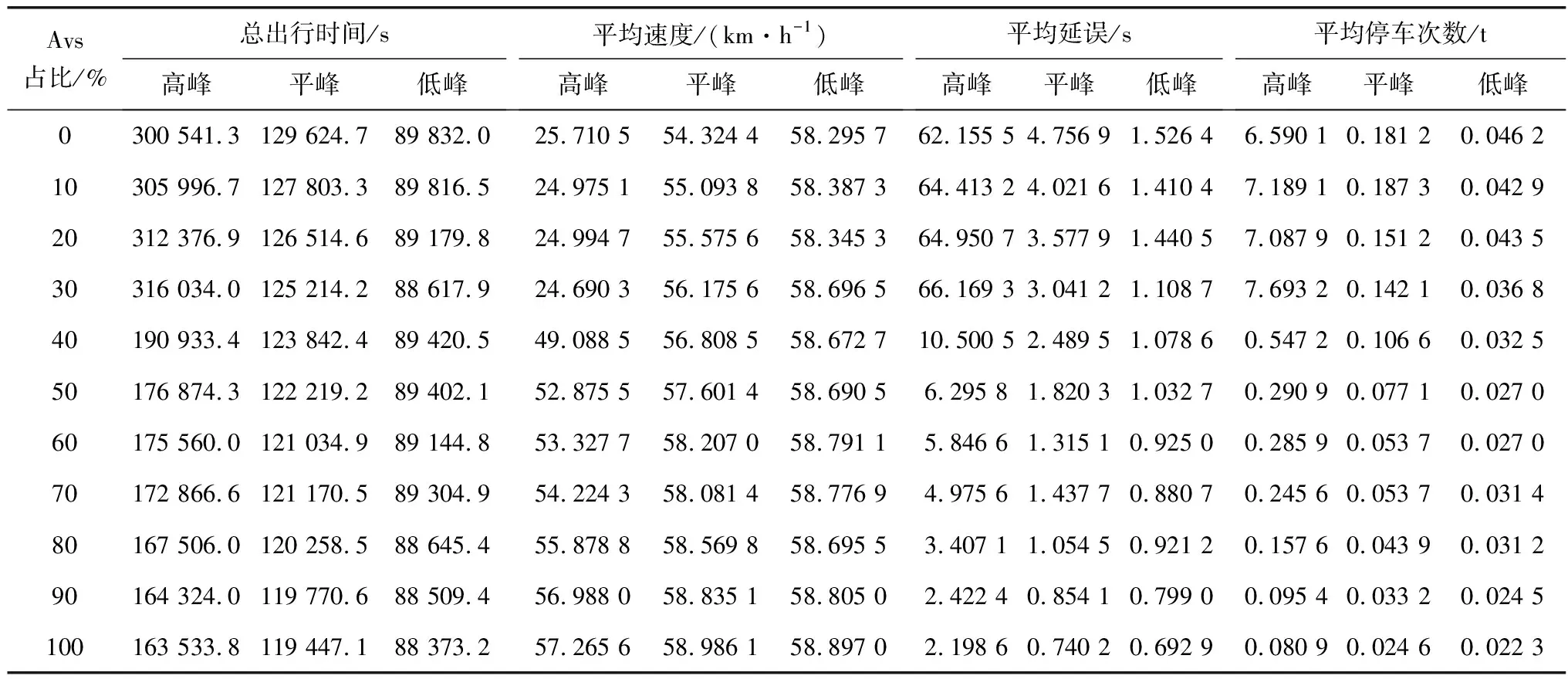
表4 仿真路网交通效益评价指标运行结果Table 4 Running results of traffic benefit evaluation index of the simulated road network
高峰期中,当自动驾驶车辆(Avs)在交通流中的比例小于30%时,自动驾驶车辆与人工驾驶车辆的混合行驶容易造成平均速度降低,增大平均延误、平均停车次数和总出行时间。这可能是因为高峰期车流量大,路网交通复杂,自动驾驶车辆小比例突然加入,致使整个道路系统的交通行为更为复杂,混和交通流处于不稳定状态,导致交通效益波动[21-22]。自动驾驶车辆占比大于30%时,自动驾驶车辆逐渐成为路网的主流车辆,才可有效提升混行交通流的交通效益,且占比在30%~40%范围时,交通效益有大幅度提升。当自动驾驶车辆达100%时,可降低45.59%的总出行时间、98.77%的停车次数和96.46%的平均延误,提升122.73%的平均旅行速度。
平峰期状态下,交通效益提升较缓慢。在系统中全部是自动驾驶车辆的下,总出行时间提升7.85%,平均旅行速度提升8.58%,而在平均延误和平均停车次数上则相对来说改善效果较显著,可降低84.43%的平均延误和86.42%的停车次数。
低峰期状态下,实际车辆本身处于一个自由行驶的状态,自动驾驶车辆的介入对总出行时间和平均速度改善不大。在全部都是自动驾驶车辆的交通系统,只降低了1.62%的总出行时间,提升了1.03%的平均旅行速度。
3.2 环境效益
随着混合交通流中自动驾驶车辆占比的提升,环境效益评价(PM2.5、NOx和CO)以及能源消耗的指标值逐渐降低,即交通环境效益逐渐提升,如表5。
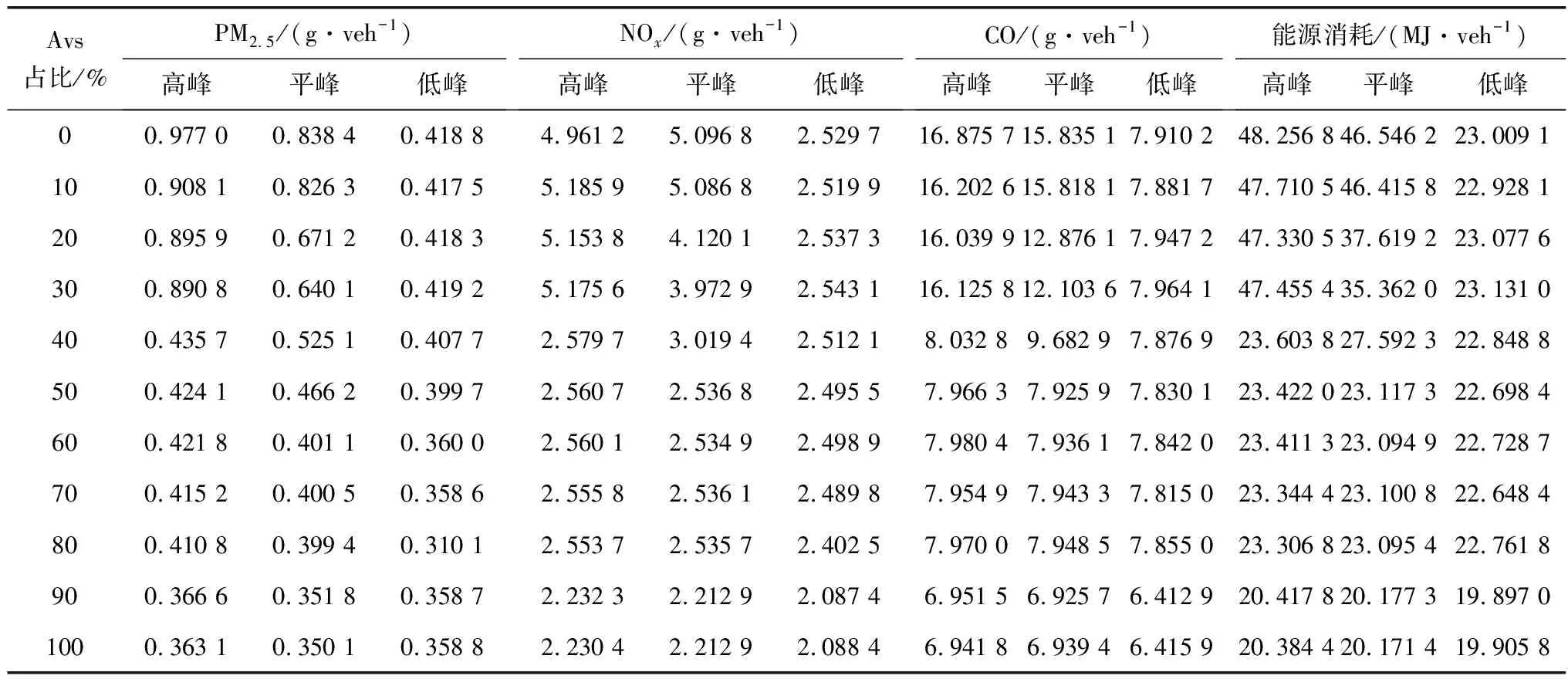
表5 仿真路网环境效益评价指标运行结果Table 5 Running results of environmental benefit evaluation index of the simulated road network
高峰期状态下,当自动驾驶车辆占比小于30%时,此时交通系统不稳定,导致环境效益处于一个波动状态。当自动驾驶车辆的占比达到100%时,在能源消耗方面,整个交通系统可少消耗约57.76%的能源,相应的PM2.5由0.977 0 g/veh减排到0.363 1 g/veh,减排率高达62.84%。在其他机动车主要污染物,NOx减少55.04%,CO减少58.86%。
平峰期状态下,当自动驾驶车辆的占比达到100%时,整个系统减少了约56.66%的能源消耗,减少排放了58.24%的PM2.5,56.58%的NOx,56.18%的CO。
低峰期状态下,由于车辆一直处于自由行驶状态,自动驾驶车辆对其环境效益改善较小,在全部都是自动驾驶车辆的交通系统上,能源消耗也只减少了13.49%,相应PM2.5减少了14.33%,NOx减少了17.47%,CO减少了18.89%。
4 结 语
笔者通过耦合VISSIM微观仿真模型和MOVES机动车尾气排放模型,搭建了一套基于自动驾驶车辆的驾驶行为的综合仿真体系,并应用在城市快速路上进行了仿真模拟,对不同市场渗透率的自动驾驶车辆在三种场景(高峰期、平峰期、低峰期)中的交通和环境效益进行了评价研究。得出如下结论:
1)在高峰期,交通效益方面,高峰期的总出行时间、平均旅行速度、平均延误和平均停车次数均有显著改善,当自动驾驶车辆达100%时,可降低45.59%的总出行时间、98.77%的停车次数和96.46%的平均延误,提升122.73%的平均旅行速度;环境效益方面,整个系统可减少了约57.76%的能源消耗,减少排放了62.84%的PM2.5,55.04%的NOx,58.86%的CO。
2)在平峰期,交通效益方面,仅有平均延误和平均停车次数较明显改善,当自动驾驶车辆达100%时,可降低84.43%的平均延误和86.42%的停车次数;环境效益方面,整个系统可减少了约56.66%的能源消耗,减少排放了58.24%的PM2.5,56.58%的NOx,56.18%的CO。
3)在低峰期,自动驾驶车辆的介入对交通效益改善并不大,当自动驾驶车辆达100%时,只降低了1.62%的总出行时间,提升了1.03%的平均旅行速度;环境效益方面,能源消耗也只减少了13.49%,相应PM2.5减少了14.33%,NOx减少了17.47%,CO减少了18.89%。
猜你喜欢
童话世界(2020年32期)2020-12-25
测控技术(2018年5期)2018-12-09
测控技术(2018年2期)2018-12-09
小学生导刊(2018年16期)2018-07-02
现代园艺(2017年21期)2018-01-03
中国工程咨询(2017年9期)2017-01-31
西南交通大学学报(2016年3期)2016-06-15
中国工程咨询(2016年1期)2016-02-14
植物营养与肥料学报(2014年1期)2014-03-11
中学英语之友·上(2008年1期)2008-03-20
