
PPK在sUAS航测中的应用及精度分析
2021-08-24 12:36刘建坡王宇鑫
地理空间信息 2021年8期
刘建坡,王宇鑫
(1.河南省有色金属矿产探测工程技术研究中心,河南 郑州 450016;2. 河南省有色金属地质矿产局 第四地质大队,河南 郑州 450016;3. 昆明理工大学城市学院,云南 昆明 650051)
小型无人机系统(sUAS)的发展使人们能够从低空飞行高度获取航空图像成为可能[1-2]。航测影像可用于多种工程应用,例如地形图,建筑物的三维(3D)建模,土方估算,3D环境建模,建筑物损坏评估,洪水危害监测,滑坡和边坡稳定性监测[3-6]。sUAS航测作业灵活,便于携带、成本低,但由于sUAS携带的是非量测相机生成的影像畸变差较大,在后续处理中需布设较多的精确控制点以进行精确的地理配准来提高成果精度,由此增加了测量工作量[7-9]。本文主要研究了GNSS-PPK技术在小型UAV系统中的应用及精度分析,研究结果表明在具有精确相机参数的前提下,不布设GCP仅基于GNSS-PPK 技术的小型UAV系统航测获取的具有cm级定位精度的影像,经严密地理配准后可以达到大比例地形图规范要求。
1 GNSS-PPK原理
GNSS动态后处理(post processing kinetic,PPK)技术是一种基于载波相位测量的后处理差分技术,随着PPK技术的日趋成熟,能够在基于IGS提供的精密星历和精密后处理情况下获得cm级的平面高程定位结果。这为基于GNSS-PPK的小型UAV系统航测提供了有力的技术保障。在一定的距离范围内(<50 km),流动站和参考站间的误差(主要包括轨道误差、电离层误差、对流层误差、卫星钟差等)具有很强的相关性。基于该相关性利用同步观测的一台参考站接收机与至少一台流动站接收机对卫星进行同步观测,内业利用相关专业软件对采集的数据进行差分后处理,对数据进行线性组合,形成虚拟的载波相位观测值,确定参考站和流动站之间的相对位置,引入精确的已知参考站坐标,最终获得流动站精确的三维坐标[10-13]。PPK只需分别把参考站和流动站获取的GNSS原始观测数据记录下来,参考站和流动站之间不需要实时 通信进行数据传输,GNSS-PPK较GNSS-RTK最大的技术优势在于可以采用事后IGS提供的精密卫星星历进行动态差分后处理,相较于RTK克服了数据传输的局限,作业距离更长,数据更稳定[14-15]。
2 PPK数据处理关键技术
在PPK工作模式下,把基准站(地面基站)获取的GNSS原始观测数据和流动站(无人机端)获取的GNSS原始观测数据分别导入相关专业后处理软件进行处理。利用IGS站提供精密星历和地面参考基站已知坐标,解算出飞机端流动站的精确三维坐标。载波相位观测值的改正值可用式(1)表达:

式中,Ri0表示IGS站提供的第i颗卫星的精密星历在t时刻的轨道精确位置与地面基站的已知坐标计算得出的参考站与卫星间的真实距离;Ni0(t)代表参考站初始相位模糊度;Ci0(t)表示参考站初始历元到观测历元的相位整周数;φi0(t)表示参考站相位观测值的小数部分;λ表示波长。
将校正值加入载波相位观测方程式得到式(2):

式中,Nri(t)表示流动站初始相位模糊度;Cri(t)表示流动站初始历元至观测历元的相位整周数;φir(t)表示流动站相位观测值的小数部分;dρ表示同一观测历元的各项残差值。理论上利用式(2)只要参考站接收机和流动站接收机同步观测4颗以上的GNSS卫星数据,利用最小二乘法就可算出流动站的精确三维坐标。
3 精度分析
3.1 研究区概况
研究区位于河南省某平原地带,研究区中心纬度为33 52′48″,经度为114 12′25″。研究区属于基本农田,生长着10 cm左右高的小麦,视野开阔,GNSS信号良好,有利于无人机的飞行试验。研究区位置卫星影像图如图1所示。

图1 研究区卫星影像图
3.2 数据采集
首先在研究区进行实地踏勘,确定具体的航飞区域,做好数据采集前的准备工作。在研究区已知控制点上架好地面参考基准,参考站采用的是美国天宝公司的Trimble SPS985 GNSS接收机。地面基准站开机,输入已知控制点点名和坐标及天线高,GNSS测量模式以PPK模式启动基准站开始测量。本研究区航飞采用的是精灵4RTK,在确定好的研究区域进行航向规划,设置飞行高度80 m,飞行速度8 m/s,航向重叠80%,旁向重叠70%,拍照模式采用定时拍照,照片比例3∶2,白平衡选择晴天,云台角度设置-90 等航测参数。飞机连接网络RTK,在GNSS-RTK固定、返航点已记录并确保周边安全的情况下开始无人机起飞。本次航飞用时约7 min,共拍摄了144张影像,无人机飞行轨迹和曝光点位置如图2所示。
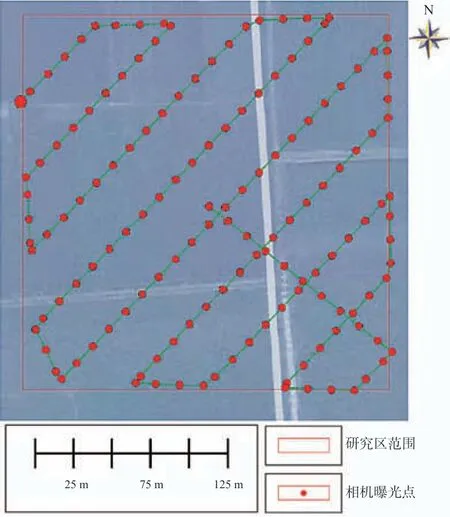
图2 UAV轨迹
3.3 数据处理
无人机携带的相机与RTK模块采用微秒级时间同步,能够把获得的每张高清照片的高精度位置信息同步记录在照片的EXIF和XMP位置区域。相机中保存了RTK标准原始数据和拍照时间信息。
3.3.1 GNSS-RTK数据处理
无人机GNSS接入的是千寻cm级高精网络RTK,能够获取每张照片的高精度POS数据,该POS数据采用的是2000国家大地坐标系,高程系统采用的是椭球高。由于原始POS数据都是大地坐标,需要根据研究区域把大地坐标投影到高斯克吕格3度带投影坐标系,这是同一个椭球不同坐标系的转换,不存在转换误差。同时利用基于1′×1′大地水准面模型(egm2008)的 Trimble Business Center把大地高转换成1985国家高程基准的高程。基于GNSS-RTK的原始POS数据 (CGCS2000大地坐标格式)见表1。转换后的基于GNSS-RTK的原始POS数据(高斯3 带投影格式)见表2。

表1 基于RTK的POS数据/m

表2 基于RTK的POS数据/m
3.3.2 GNSS-PPK数据处理
把地面基准站和无人机移动端采集的原始GNSS数据都导入计算机。因为全球每个GNSS厂家都有自身的数据文件格式,因此需要把地面基准站和无人机移动端采集的原始GNSS数据统一转换成标准RINEX数据格式,再把RINEX格式数据文件转换成PPK后处理软件需要的数据文件格式。最后利用相应的PPK后处理软件进行后处理差分,生成PPK后处理差分数据成果。
本研究区地面参考站采用的是天宝SPS985接收机,后处理软件采用NovAtel公司Waypoint产品组研发的强大的、可配置度高的事后处理软件InertialExplorer8.7。所以需要前提是把地面基准采集的GNSS原始数据(T02格式)利用天宝的数据转换软件Convert To RINEX转换成标准RINEX格式,再把地面端RINEX格式数据文件转换成后处理软件InertialExplorer8.7需要的数据文件格式。把移动端RTCM3.2 MSM5 格式的卫星观测值数据及星历数据利用rtkconv软件转换成标准RINEX格式数据,然后把无人机的RINEX格式数据文件也转换成后处理软件InertialExplorer8.7需要的数据文件格式。
后处理过程主要包括: ①新建项目。②分别导入地面基准站端和无人机流动站端观测数据。输入对应的天线类型、量高方式、天线高度以及参考基站的已知三维坐标。③PPK后处理可以从IGS站下载精密星历也可以不下载精密星历,本研究下载了精密星历。进行相应的处理参数设置,进行PPK后处理,解算完成后,得到每个曝光点对应的固定解,将处理结果导出[16]。其PPK处理后的固定解结果见表3、4。该成果是相机曝光时刻飞机端GNSS天线相位中心坐标位置。再采用摄影测量软件对影像进行处理时还需要加上相机改正值,以把GNSS天线相位中心的位置坐标转换到相机中心位置坐标。把PPK解算出的飞机端GNSS天线相位中心的位置坐标加上天线相位中心的位置到相机中心位置的补偿值后得到的相机中心位置坐标(即POS数据),见表5、6。PPK处理前UAV飞行轨迹与地面基准站位置见图3,PPK处理后UAV飞行轨迹、曝光点时刻飞机端GNSS天线相位中心位置及地面基准站位置见图4。

表3 PPK固定解数据/m

表4 PPK固定解数据/m

表5 基于RTK的POS数据/m

图3 PPK处理前UAV轨迹

图4 PPK处理后UAV轨迹
3.3.3 UVA航测影像数据处理
影像处理采用专业的影像后处理软件,影像后处理软件有俄罗斯的AgisoftMetashape(以前称为PhotoScan)、瑞士的Pix4D公司Pix4Dmapper、Bentley公司的ContextCapture(以前称为Smart3D)以及美国天宝公司的UASMaste和Trimble Business Center 等。本研究区影像处理软件采用的是瑞士的Pix4D公司Pix4Dmapper,具体的处理流程包括:①新建一个项目;②把获取的航测影像导入Pix4Dmapper;③进行坐标系统设置;④根据影像中内嵌POS数据决定是否需要独立的POS数据;⑤输入相机参数;⑥根据需要进行处理选项设置;⑦软件一键开始自动初始化处理、点云和纹理的生成以及正射影像图(DOM)、数字表面模型(DSM)等成果产品。该研究区的DOM成果见图5;DSM成果见图6;局部三维立体模型见图7;局部密集点云成果见图8。
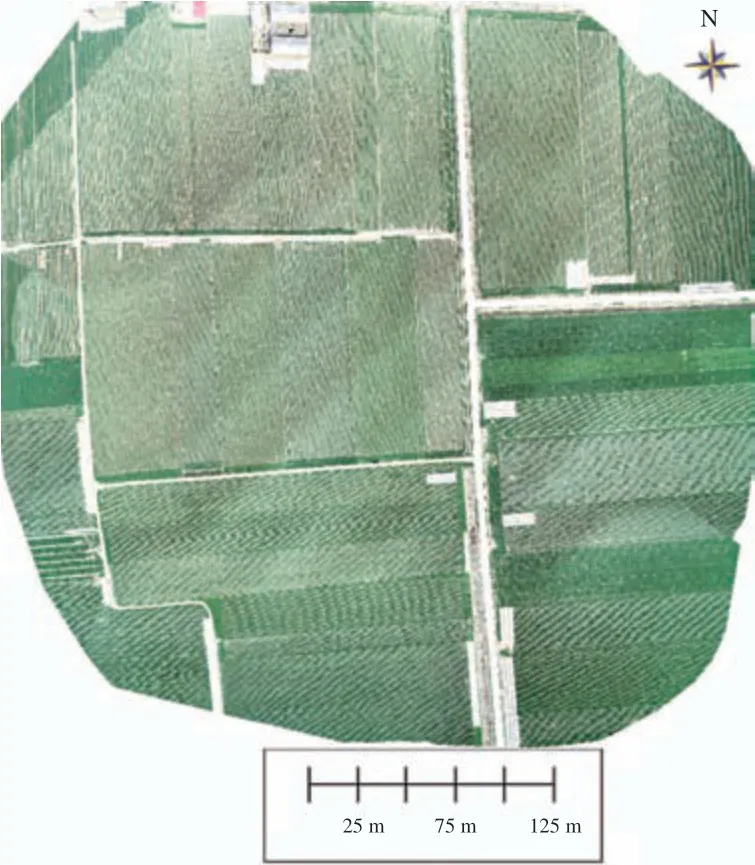
图5 研究区DOM成果
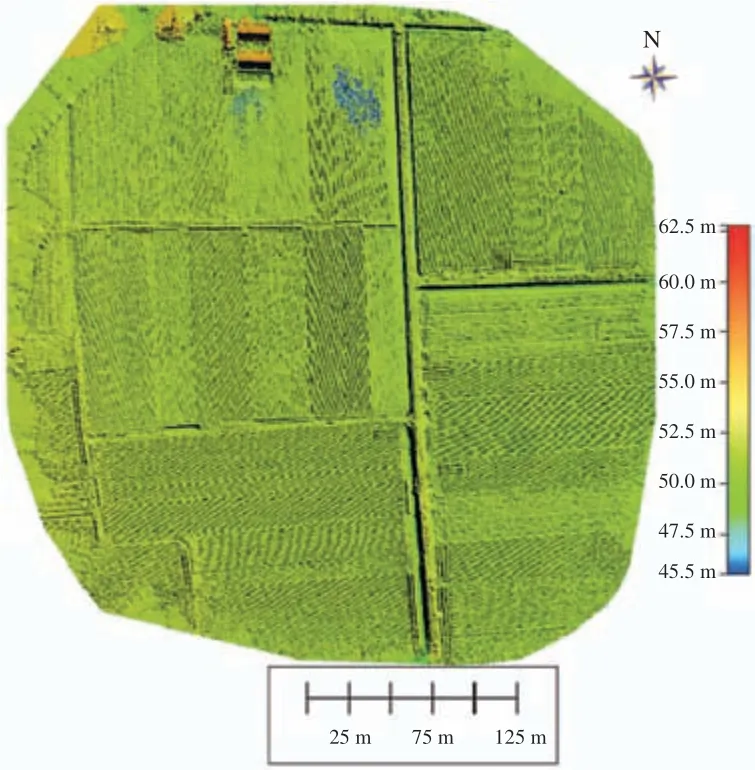
图6 研究区DSM成果

图7 局部真三维立体模型成果
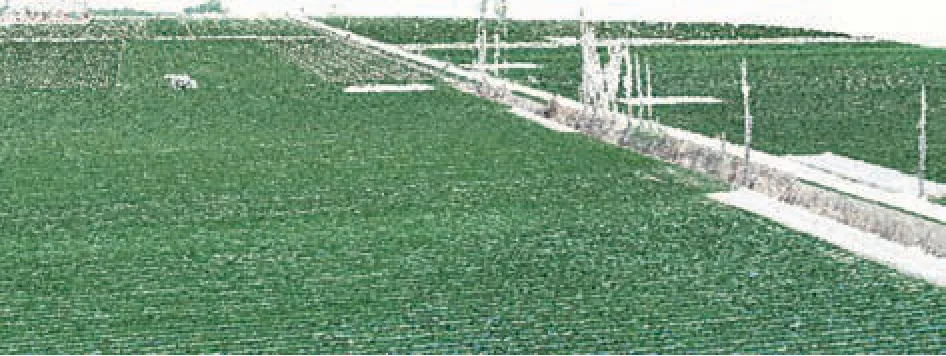
图8 局部三维密集点云成果
3.4 精度评定
为检核基于PPK的sUAV系统的航测成果精度,首先把基于PPK的sUAV系统的航测原始GNSS数据经PPK后处理软件处理固定解数据+移动端GNSS天线到相机中心改正值后的POS数据与基于RTK的sUAV系统的航测POS数据进行比较,这用于检查PPK的内符合精度。研究区实地布设5 个靶标点,采用基于网络RTK技术的美国TrimbleSPS985接收机随机检测 16个特征地物点,用这些检查点检查PPK的外符合精度。
3.4.1 内符合精度
利用基于PPK的sUAV系统的航测原始GNSS数据,经PPK后处理软件处理后的固定解数据+移动端GNSS天线到相机中心改正值后的POS数据,与基于RTK的sUAV系统的航测POS数据进行比较。利用公式(1)、(2)、(3)分别计算出每张影像POS数据的三维坐标差,三维坐标差统计表(见表6)。北坐标x中误差按式(5)计算,东坐标y中误差按式(6)计算,高程中误差h按式(7)计算[17]。统计结果显示△x的误差区间为[-13mm,5mm],△y的误差区间[-15mm,2mm],△h的误差区间[-3mm,45mm]。计算得出坐标x的中误差为 5mm,坐标y的中误差为 8mm,坐标h的中误差为 22mm。为了直观显示三维坐标的差值的分布情况,绘制了三维坐标差值分布图(见图9)。东坐标误差分布图见图10,北坐标误差分布图见图11,高程误差分布图见图12。因为网络RTK的精度是cm级精度,统计结果表明内附合精度比较高,基于PPK的sUAV航测能够代替基于RTK的sUAV航测。
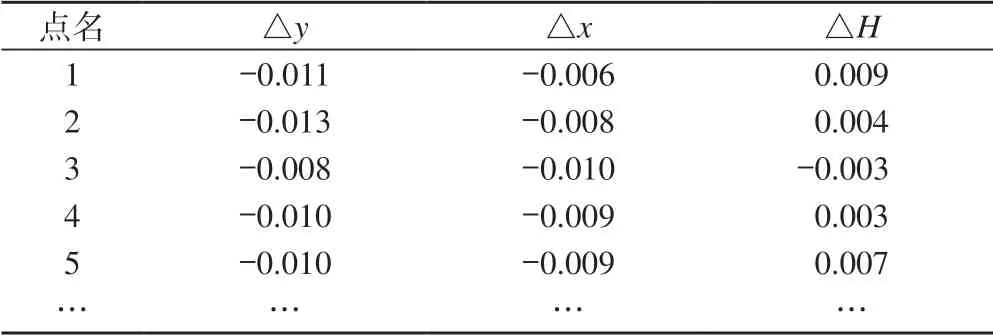
表6 三维坐标差统计表/m
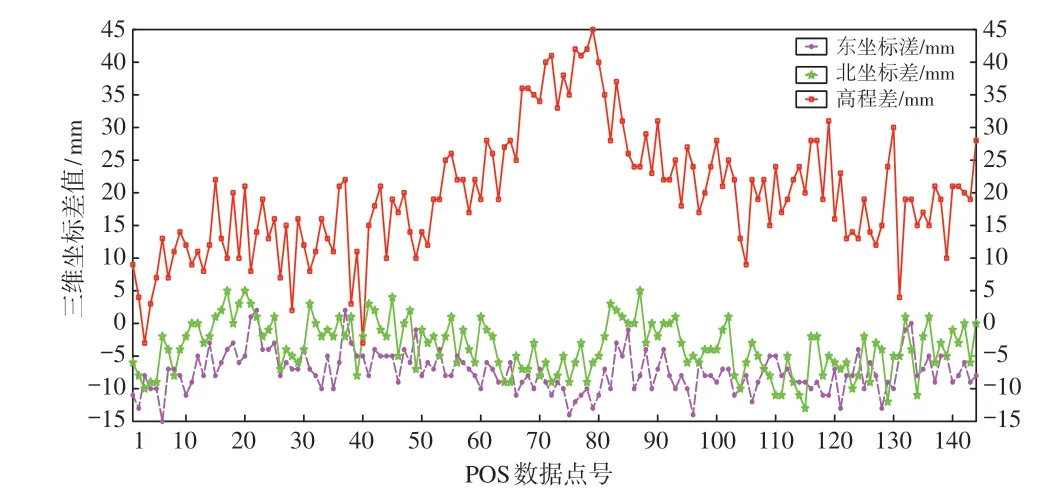
图9 三维坐标差值分布图

图10 △y频率直方图

图11 △x频率直方图

图12 △h频率直方图


式中,△yi表示第i张影像的POS数据东坐标差;yppki表示基于PPK的第i张影像的POS数据东坐标;yrtki表示基于RTK的第i张影像的POS数据东坐标;△xi表示第i张影像的POS数据北坐标差;xppki表示基于PPK的第i张影像的POS数据北坐标;xrtki表示基于RTK的第i张影像的POS数据北坐标;△hi表示第i张影像的POS数据高程差;hppki表示基于PPK的第i张影像的POS数据高程;hrtki表示基于RTK的第i张影像的POS数据高程;Mx表示坐标x的中误差;My表示坐标y的中误差;Mh表示高程h的中误差;n表示检测点数。
3.4.2 外符合精度
为检核航测成果的精度,在研究区布设5个靶标点,并在研究区内采用 GNSS RTK技术随机采集16个外业检查点,这些采集点都远离植被、建筑物等建构 筑物。这21个点的坐标记作(yrtki,xrtki,hrtki),其中i=1,2,3,…,21。在UAV航测生成的成果中提取对应这21个点的坐标记作(yUAVi,xUAVi,hUAVi),其中i=1,2,3,…,21。东坐标误差△y按式(9)计算,北坐标误差△x按式(10)计算,高程误差△h按式(11)计算。
经统计计算得出UAV免相控成果精度见表7。 21个检查点与 DOM、密集点云上对应点比较表明,在没有遮挡地物的地区东坐标中误差为 0.039 m,北坐标中误差为 0.031 m,高差中误差为 0.046 m。检查结果表明在没有植被或较少植被覆盖的地形采用基于PPK的小型UAV航测成果可以满足1∶500地形图规范要求。在有植被、建构筑物等遮挡区域高程精度会受到较大影响,这还需要采用其他测量方法如无人机激光雷达方法进行补充测量。

表7 三维坐标差统计表/m
4 结 语
本文对基于PPK和RTK的sUAS获取的POS数据进行了精度分析研究,通过分析得出基于PPK和RTK的小型UAS获取POS数据具有较好的一致性。通过探索在没有GCP仅依靠 GNSS-PPK技术获取的具有精确定位的影像实现地理配准。并把基于GNSSRTK技术获取的具有精确定位影像的地理配准成果与通过地面GNSS-RTK技术采集的检查点进行了比较。研究分析结果表明在相机校准的前提下,不采用GCP仅依靠 GNSS-PPK技术获取的具有精确定位影像的地理配准成果也可以达到cm级定位精度,在没有网络RTK信号覆盖的区域可以采用基于PPK的sUAS进行低空摄影测量。这项研究的结果和结论可以帮助从业人员开展sUAS航测作业。
猜你喜欢
当代陕西(2020年23期)2021-01-07
今日农业(2020年20期)2020-12-15
能源(2018年10期)2018-12-08
能源(2016年10期)2016-02-28
安徽地质(2016年4期)2016-02-27
中国高新技术企业(2015年15期)2015-05-04
黑龙江工程学院学报(2015年2期)2015-04-19
全球定位系统(2015年4期)2015-02-28
浙江国土资源(2014年5期)2014-04-28
汽车与新动力(2013年3期)2013-03-11
