
无人机视觉SLAM环境感知发展研究
2021-08-23 09:02刘小雄黄剑雄居玉婷章卫国
计算机测量与控制 2021年8期
苗 升,刘小雄,黄剑雄,居玉婷,章卫国
(西北工业大学 自动化学院,西安 710072)
0 引言
近年来,随着无人机相关产业的大力发展,其在非国防和民用等诸多领域扮演着越来越重要的作用。室内场景飞行与感知周围环境是旋翼无人机经常需要面临的情景,如:室内救援、室内搜索及环绕障碍等。在这些复杂的环境下旋翼无人机常常难以进行自我导航,由于信号被遮挡或者存在缺失,会导致传统的GPS导航定位方法失败。无人机具有轻量化的要求,这便使得难以在上面防止过多过重的传感器,而在没有先验的地图信息之下,如何感知未知的周围环境和确定自己当前的位置和姿态便是我们首先需要解决的问题之一。准确的位姿的确定对于无人机在以后执行高级任务,如:路径规划、避障穿越、三维重建、目标跟踪等方面具有十分重要的意义。
同时定位和建图(SLAM,simultaneous localization and mapping)[1-2]便是解决这个问题目前最受欢迎的方法,它是由Smith[3]和Cheeseman在1986年在IEEE机器人技术和自动化会议首次提出的。SLAM研究方法根据传感器的不一样,可以分为基于激光雷达的SLAM和基于计算机视觉的SLAM。随着视觉传感器的广泛使用和成本的降低,基于视觉的SLAM逐渐引起人们的注意,成为目前研究的一大热点,依据实际使用的摄像头不同类型可以分为单目、双目、RGB-D的SLAM等。
经典的SLAM框架包括:前端视觉里程计、后端优化、建图、回环检测等4个主要部分。
SLAM前端又称为视觉里程计(VO,visual odometry),主要分为基于图像特征变化的特征点法和基于图像灰度的直接法两类。前者基于特征点,通过最小化两帧图像之间的重投影误差(bundle adjustment),后者是根据像素的亮度信息估计运动位姿,不需要计算描述子和关键点,在灰度假设不变的条件下,通过最小化光度误差来求解机器人的运动位姿。
在后端优化的部分,由于SLAM的运动方程和观测方程都是非线性函数,因而我们主要是采取了非线性优化的方法来优化误差函数,大致可以分为以只考虑k时刻的状态和k-1时刻状态的具有一阶马尔可夫性的扩展卡尔曼滤波[4-5]的方法和考虑k时刻与之前所有状态的非线性优化的方法。
早期的SLAM最开始的应用载体是一些地面移动机器人,利用卡尔曼滤波或者粒子滤波去融合轮式里程计和传感器的信息。比较早的将SLAM技术用到无人机上是在2003年由Aouof[6]等人,他们将相机固定在飞机朝下,控制输入信息传递到飞行器而不再是里程计。2006年Angeli和Filliat[7]等采用2D的纯视觉SLAM应用在飞艇和无人机上面。在视觉处理方面,他们关联了Harries角点检测器和SIFT描述子,同时为了提高地图的精度,将径向的畸变系数也作为了卡尔曼滤波器的参数,实验结果表明该2D-SLAM系统可以提供稳定的位姿估计。2014年由Forster等人提出的著名的SVO算法[8]应运而生,该SLAM算法专门以无人机的俯视相机为目标应用平台,舍弃了对于特征点描述子的计算,并且在关键点周围4*4的区域内进行块匹配,因而速度极快且在无人机平台上实验效果显著。
无人机的SLAM相关工作已经有很多,除了上述研究成果外,吴显亮等[9]、王希彬[10]和赵良玉[11]从不同角度对SLAM技术进行相关总结。基于上述研究成果,本文从SLAM的基本结构展开,讨论了SLAM的基本框架、相关算法以及SLAM领域最新的研究进展,并对未来SLAM技术的发展进行了展望。
1 视觉SLAM的基本框架
1.1 前端提取
视觉的特征是由关键点(Detectors)和描述子(Descriptor)两部分组成的。被检测的对象一般有点特征,直线特征以及边缘,轮廓特征等。关键点常常是物体边界方向突然改变的点或两个或多个边缘段之间的交点。当图像局部或者全局存在亮度和光照变化的时候,关键点仍然稳定,在SLAM中应用较多,故在SLAM的特征提取几乎提取的都是特征点(Keypoint)。经典关键点检测器有:Harris角点检测器(HARRIS,harris corner detector,) 、SIFT角点检测器(SIFT,scale invariant transform)、SURF角点检测器(SURF,speed-up robust features)等。现代关键点检测器有:FAST角点检测(FAST,features from accelerated segment test)、ORB角点检测器[12]( ORB,oriented FAST and rotated BRIEF)等。目前效果比较好的特征点是ORB特征点,ORB是在FAST关键点的检测速度快的基础之上添加了尺度和旋转的特征,可以称为“Oriented FAST”——改进的FAST角点,其快速性可以满足SLAM实时的要求。其尺度性是在构建的金字塔的每一层去检测角点,而旋转不变性是通过灰度质心法去实现(Intensity Centroid)的。
在图像中对于寻找到关键点之后,我们需要一种方法将不同的图像关键点加以对比,寻找到其中相似的关键点。描述子作为一种描述关键点周围的环境信息被人为设计出来。目前广泛被应用的描述子有基于梯度HOG描述子[13]和二进制BRISK描述子[14]。HOG的基本思想是通过物体在局部图像邻域中的强度梯度分布来描述物体的结构,计算代价昂贵。实际工程中,我们采用计算代价相对较少的二进制描述子,其核心思想是仅仅依赖强度信息(即图像本身) ,并将关键点周围的信息编码为一串二进制数字。有了关键点周围的描述子,我们便可以得到我们提取关键点周围的环境信息。
得到了带有描述子的关键点,接下来便可以在不同的图像之中进行特征匹配。计算关键点描述子的汉明距离(hamming distance),来表征描述子的相似程度。当检测到特征点数量非常大时,快速近似最近邻(FLANN)算法[15]能够满足SLAM 的实时性需求。
在SLAM领域,特征点法是比较流行的方法,但提取特征点存在着耗时长、图像信息丢失严重等缺陷。针对在无人机的应用领域,一种与特征法相对应的直接法也渐渐地受到了人们地重视。直接法基于灰度不变假设,即认为同一个关键点在两幅图片之中,其灰度值应该是不会变化的。在直接法中,我们可以选择不计算关键点周围的描述子而得到其他图像中的配对点(半直接法),通过光流[11]来跟踪关键点的运动,从而估计相机的运动;或者既不计算关键点也不计算描述子(直接法),而是选择一些有明显梯度变化的像素(半稠密直接法),或者干脆选择所有的像素点(稠密直接法)参与计算,之后根据最小化光度误差可以求解位姿。直接法对于场景的特征信息没有要求,只需要场景中存在明暗的变化情况即可。
1.2 VO里面的数据关联与PnP问题
不管是特征法,还是直接法里面的光流追踪,我们都可以得到在相邻图片中已经匹配好的特征点。如何由这相邻的两幅图片求解出相机的位姿变换是SLAM前端里程计的核心问题。根据匹配点的维数可以划分为:2D—2D、2D—3D、3D—3D三大类问题。在SLAM里面,3D点的深度信息可以由RGB-D相机给出,或者在单目相机中,可以通过三角化去恢复2D点的深度信息。2D-2D可以通过经典的八点法去求解本质矩阵E[16],恢复出旋转信息和平移信息。2D—3D是在SLAM最常见的一种匹配方式,它是在知道关键点的3D空间位置与其在图像上对应的2D点的像素坐标的前提下,去求解此时的相机位姿,这便是一个PnP问题。在SLAM中,我们可以利用3对2D—3D的匹配点信息,恢复出此时的相机位姿。大致的做法,分为两类,一种是线性化几何约束的解法,包括EPnP等算法,另一种是基于计算机视觉的非线性的解法,将其转化为一个BA(bundle adjustment)问题。为了保障求解的精度,SLAM主要采取的做法是构建最小二乘方法,用ξ表示相机的位姿,Pi表示第i个点对应的空间3D坐标,ui是第i个点对应的像素2D坐标:
(1)
通过不断调整相机的位姿ξ去使3D点重投影到图片上的2D点f(Pi)与图片上该对应关键点所在的2D点ui的误差函数的二范数最小,来达到优化的目的。
1.3 后端优化
前端的视觉里程计仅仅可以给出短时间内的轨迹和地图,随着时间的累积,无人机的位姿不确定性会越来越大,无法在实际中进行应用。因而,后端的优化部分就是为了解决在较长时间,数据量很大的情况下去求解最优的轨迹和地图。按照优化的思想大致可以分为基于滤波的方法和基于优化的方法。
1.3.1 基于滤波的后端
2007年帝国理工学院的A.J.Davison提出了世界上第一个可以实时应用的SLAM系统——Mono-SLAM[17],这是第一个基于EKF方法的实时的单目SLAM系统,虽然初步解决了实时的问题,能够在线创建稀疏的地图,但是因为存在较大的漂移量,效果不是特别好。Montemerlo[18-19]则分别研究了基于粒子滤波器(PF,particle filter)的FastSLAM的方法。在FastSLAM包含了机器人定位和特征标志位置的两个过程。粒子滤波器中可能的运动路径用粒子表示,1个粒子对应着1种可能,每条路径的好坏是由观测信息计算得到的粒子权重进行评价。在路标的估计当中,FastSLAM则采用了传统的EKF进行估计。Mourikis提出了一种融合IMU和视觉信息的滤波算法——MSCKF(multi-state constraint Kalman filter)[20],该算法不同于EKF将特征点加入状态变量,而是将不同时刻的相机位置p和姿态(四元数q表示)加入状态变量进行优化更新。由于状态变量的维度大幅度的降低,且加入了IMU信息,因而MSCKF可以适用于更剧烈的运动,且鲁棒性也有了显著性的提高。
1.3.2 基于优化的后端
2007年,同步追踪和建图算法[21](PTAM,parall tracking and mapping)这一非线性优化的SLAM首次成功应用。该算法由英国牛津大学的G.Klein和D.Murry提出并开源。PTAM的特点如下:
1)PTAM首次引入了SLAM当中的前后端的概念,提出了跟踪部分是需要实时的响应数据,而对于地图优化的部分则没有必要进行实时的计算。
2)PTAM引入了关键帧的机制,减少了需要优化的图像数量,确保了算法的实时性。
3)PTAM是第一个采用BA非线性优化作为后端优化的方案,在PTAM提出之后SLAM逐渐转向了非线性优化为主导的后端。在PTAM提出之后,后端部分优化成为了主流的方法。
此后,研究者们逐渐注意到BA 问题系数矩阵具有一定的稀疏性(即Jacobian 矩阵中只有当前待优化变量的对应位置处为非零项,其余位置均为零),进而可基于Schur 消元将无关变量边缘化,实现BA 中线程方程组的稀疏求解[22]。稀疏化处理虽然可以缓解非线性优化的计算负担,但计算规模依然会随着时间而累积。OKVIS[23]它是由苏黎世联邦理工大学S.Leutenegge 等人提出的基于双目+惯导的视觉里程计,是一种基于滑动窗口的非线性优化紧耦合算法。该算法采用滑动窗口方法约束优化的方法满足系统的实时性要求,但它没有重定位和闭环检测等环节,而且CPU的占有率较高。Vins-mono[24]是香港科技大学沈劭劼老师开源的单目视觉惯导 SLAM 方案,其推荐的平台是微小型旋翼无人机。该算法也是融合了惯导的单目视觉系统,是目前很出名的无人机SLAM算法。该算法采用光流法进行特征点的追踪,IMU以更快的速率进行预积分[25](IMU pre-intergration),把关键帧之间的IMU测量值积分成相对运动的约束,两者的数据进行了视觉惯性联合初始化,后端是基于滑动窗口的重投影误差和IMU残差非线性优化和基于词袋模型的回环检测。
非线性优化因为数据量的巨大,以至于学者们认为该方法在本世纪初都无法实现机器人的实时SLAM,所以减少计算量就显得尤为重要。无人机的视觉导航,若我们仅仅关注无人机的定位问题,那么在后端的优化部分进行路标点的优化便会耗费大量的计算资源。有论文指出,在BA问题中放弃对于路标点的优化,而仅仅关心相机位姿之间的关联,构建位姿图(PG,pose graph)便可以大幅度降低优化的规模[26]。另一种基于概率图模型的因子图优化(FGO,factor graph optimization)算法也在降低非线性优化计算量也引起了学者的重视。因子图是一种求解最大后验概率的概率图模型[27],这种方法在2008年首次应用在SLAM中位姿图的求解,该团队研究和开发了因子图优化算法iSAM2[28],并发表了因子图算法库gtsam[29]。因子图优化的最大优势在于增量特性:在新的变量因子加入图模型前,先筛选出与其关联的因子;随后,只对受新变量因子影响的关联因子进行更新,而保持其余因子不变,如图4所示。按照这样的处理思想,我们不必再每次新增加节点的时候,对于整个图都进行优化,节省了大量的计算成本。
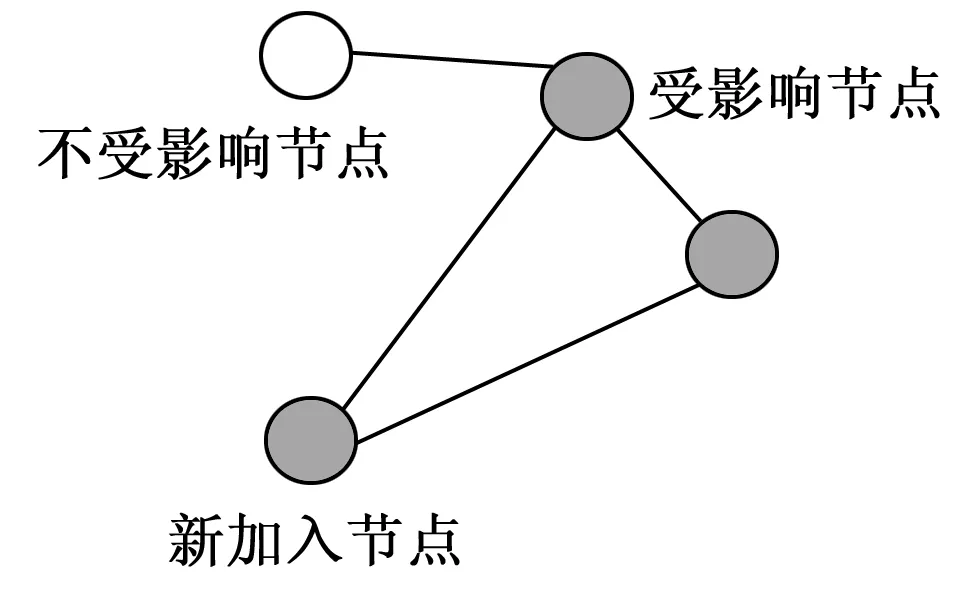
图3 因子图增量特性
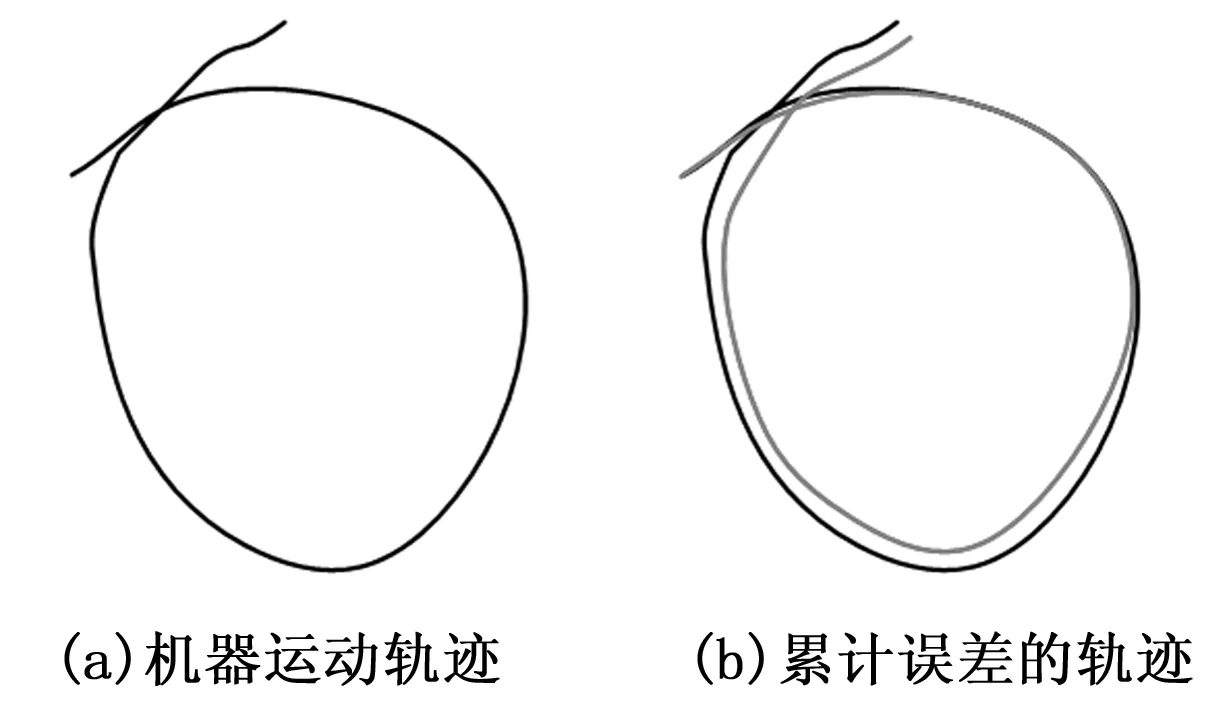
图4 轨迹图
往往,完整的VSLAM还包括全局优化部分。后端优化能够有效地保证估计精度,而对于长时间运行的情况下,系统累积的漂移误差便会成为问题,因而后端属于局部优化。闭环检测的模块主要是对于整个模块的位姿图执行优化来消除漂移误差,如图1所示,这样便可以在检测到回环的时候校正位姿,消除SLAM的累计误差,使我们得到全局一致的轨迹和地图。闭环检测一般可以按以下4步进行:

图1 SLAM的基本框架
1)检测回环发生;
2)计算回环和当前帧的运动,理论上T=I(单位阵);
3)验证闭环成立;
4)闭环。
全局优化中的回环检测很像是一个分类的问题,因而机器学习在这一部分大有作用。回环检测的类型数量很大,但是每一类的样本却很少。因而,回环检测相当于是一个对“图像相似性”的学习,即对场景的识别和理解。回环检测本身很像是一个非监督的机器学习,我们即可以利用词袋去检测回环发生,也可以用深度学习的方式去检测回环[34]。
1.4 建图
建图(mapping)作为SLAM的主要目标之一,对于无人机的导航定位、避障重建及人机交互等具有重要的意义。常见的地图可以分为:拓扑地图、栅格地图、路标地图、点云地图和认知地图。
拓扑地图使用关键帧作为地图的节点,关键帧之间共同的数据关联作为地图的边,该地图可以用作路径规划。栅格地图是将三维空间划分为独立的,均匀的立方体,每个立方块代表真实环境中的一个三维空间区域。立方块的值表示障碍物的概率。栅格地图可以用于导航,路径规划等应用,并且易于统合其他传感器的信息,但是随着时间的累计需要的存储空间也在增加。路标地图也称为稀疏点云地图,其可以满足SLAM的定位需求, ORBSLAM2[30]所创建的便是这种稀疏地图。点云地图是一种稠密的地图,实际上是环境中所有物体的3D点的集合。在稠密地图中,除了特征点的其他3D点可以通过极线搜索和块匹配技术恢复出它的深度信息。点云地图需要较大的存储空间去存储所有的点云信息,可以用于无人机的导航,定位避障和三维重建等任务。认知地图将语义的概念和地图中的元素联系了起来,使移动机器人可以在语义地图中更加智能的完成任务,执行更加复杂的行动。

图5 稀疏点云地图
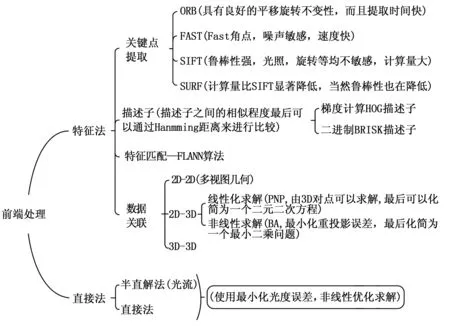
图6 前端处理概述图
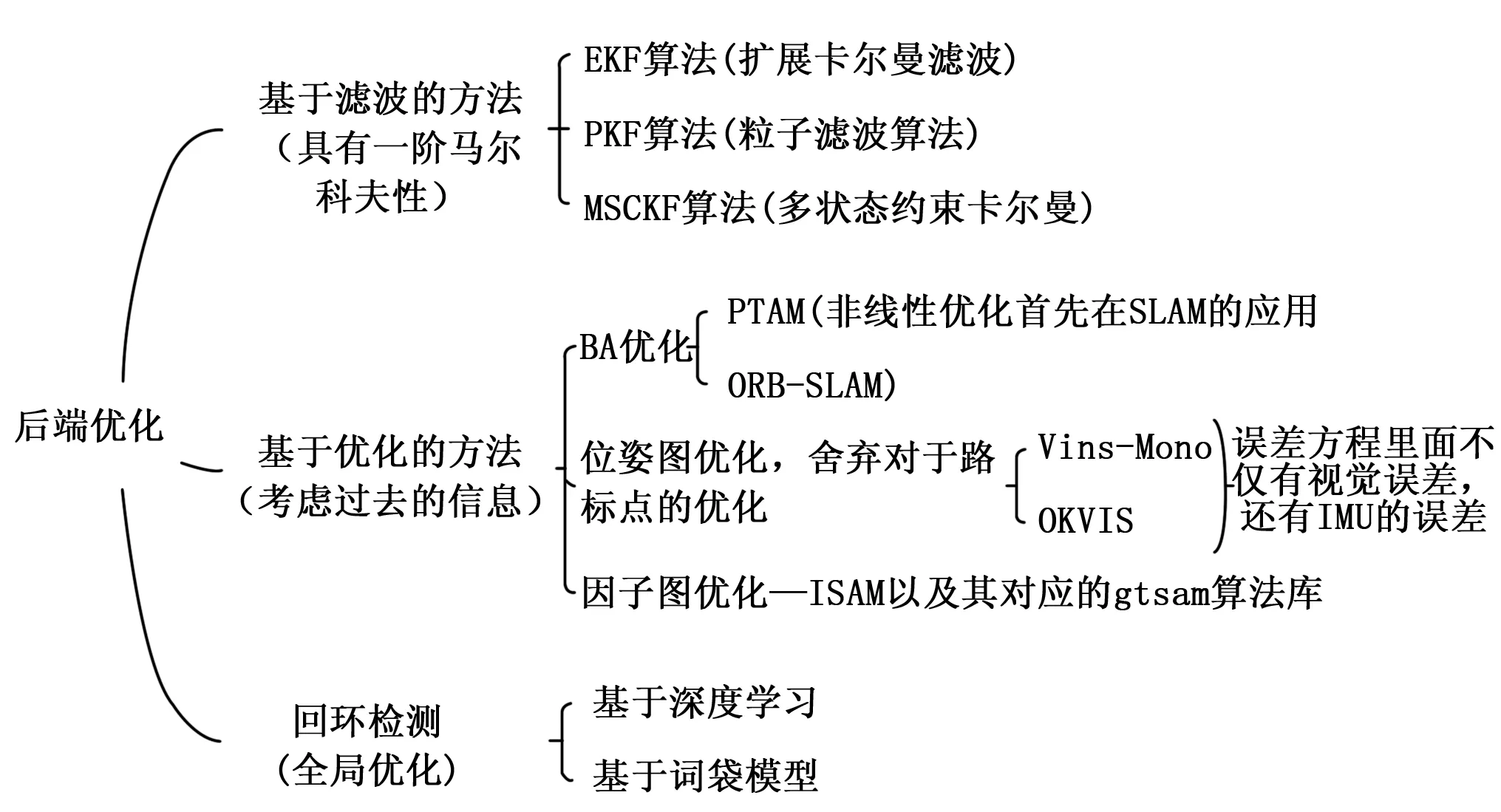
图7 后端优化概述图
2 无人机应用的开源SLAM框架的对比和世界著名实验室
已面世的SLAM 方案虽多达上百种,世界上研究SLAM的研究者也越来越多。表1给出了目前主流和具有代表性的SLAM 框架,表2给出了世界上著名的研究机构和其方向。

表1 SLAM开源框架的基本特点归纳
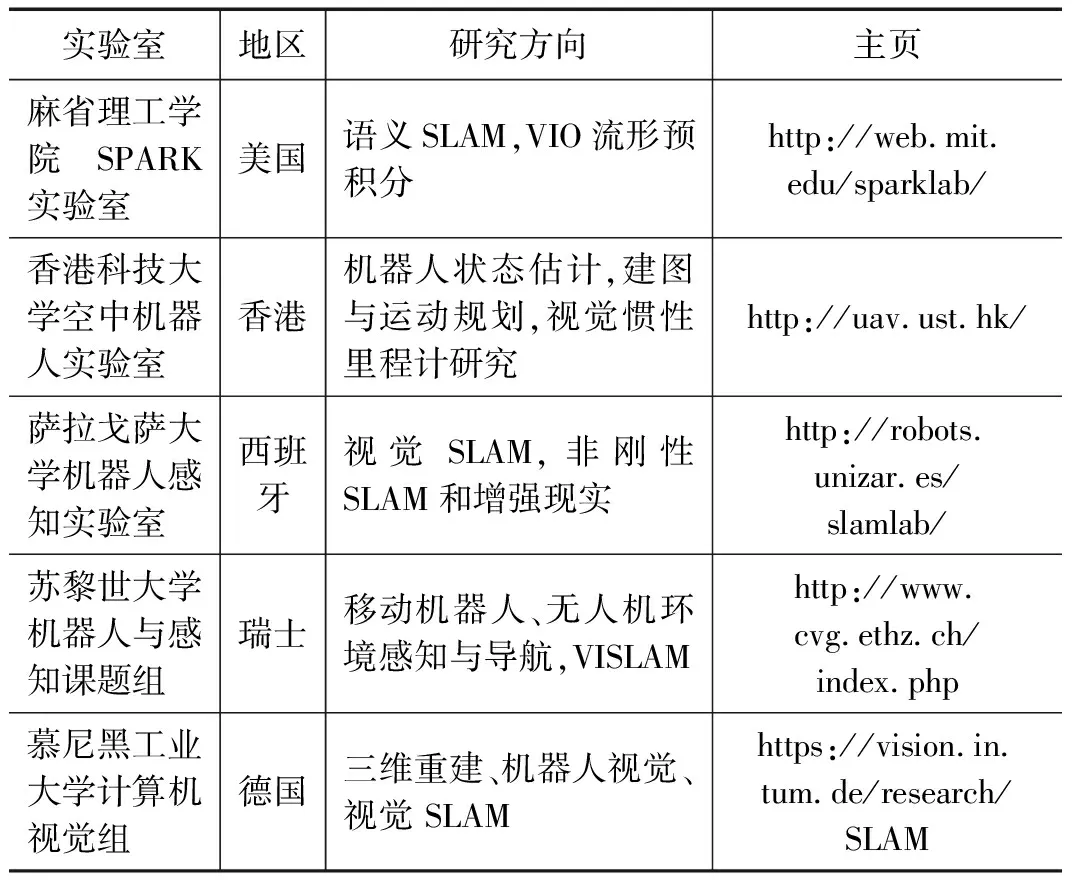
表2 SLAM世界著名研究机构
3 用于无人机的SLAM当前的研究重点
3.1 多无人机协同的SLAM
相比于单无人机的SLAM建图与定位,多无人机协同建图定位渐渐也成为了研究者关注的焦点问题。多无人机协同SLAM(C-SLAM, cooperative visual simultaneous localization and mapping)可以提高定位精度并不断与队友共享信息,加速地图的创建速度,扩大建图的范围。传统的CSLAM是各个无人机将信息传递给中央的卡尔曼滤波器,但是这样的SLAM结构将会对噪声信息非常的敏感,影响定位和建图的精度。Nemra提出一种非线性H∞的滤波方法[31],不对噪声信号统计并且将线性化的结果降至最低。通过作者给出的仿真实验表明,C-SLAM的xyz3轴位置计算精度要比一架无人机的精度高。Trujillo[32]为每一个UAV提供了单目相机,测量每一个无人机之间的相对距离来测量更新EKF以提高系统的精度,并且多无人机协作的系统可观测性优于单个无人机系统的可观测性,减少了地标的不确定性。
3.2 人工智能技术促进SLAM
3.2.1 深度学习技术
随着深度学习的不断发展,目前SLAM存在的很多缺陷是可以通过深度学习去解决的。目前已经发表两者结合的文章包括,深度学习的算法可以用于帧间的估计,SLAM的闭环检测环节;在建图方面,结合深度学习可以将图像和语义进行关联,构建环境的语义知识库,供无人机进行高级智能任务的决策等。DeepVO[33]中,位姿估计去结合有监督的学习,能够通过深度递归神经网络学习(RNN) 隐式地学习图像间的动力学关系及内在联系。在特征提取方面,相邻两帧图像在通道上进行组合,堆叠成六通道的图像,然后通过多层CNN 网络对图像进行提取,将提取的特征输入到RNN 网络中,再输出位姿。DeepVO舍弃了前端点的跟踪,后端优化等一系列的过程,提出了端到端的SLAM,节省了计算的时间。清华大学高翔[34]提出基于无监督学习的SDA ( stacked denoising auto-encoder)自动编码器去进行回环检测,仿真结果显示该方法比传统基于词袋模型的回环检测有着更强的鲁棒性。
3.2.2 语义SLAM
语义建图时当下比较热门的研究方向,高智能的无人机在未来执行复杂任务的时候,对于自己所处的环境信息要有一定的理解。语义地图,这一既包含空间的路标信息又包含环境语义信息的地图渐渐引起来研究者的注意[35]。Davison[36]提出使用卷积神经网络(CNNs)结合SLAM系统(ElasticFusion)。经验证,该算法在25Hz的RGB-D视频长时间之内可以接收2D图像并且返回每个像素的分类概率分布,然后递增的贝叶斯更新模型将跟踪每个曲面的分类概率分布,然后使用SLAM系统提供的数据关联来基于CNN的预测更新这些概率,最终进行语义建图。对比单帧CNN 语义的准确率,该算法融合了额外的观测点来对于单帧的检测率进行了改进和提高,性能从43.6%提升到48.3%。东南大学[37]在以LSD-SLAM为基础与CNNs进行了融合,对于关键帧进行了语义分割,从二维图进行语义提取然后映射成三维的语义信息。该方案对于周围的环境没有要求,且计算量也显著降低。清华大学在ORBSLAM的基础之上提出DS-SLAM[38],加入了语义分割的部分,语义分割采用SegNet, 通过光流法估算图片的特征点的位置,通过极线的距离去判断该物体是否是运动的物体,并对动态的物体进行分割。
3.3 多传感器融合的SLAM用于无人机
无人机在单一传感器的条件下导航容易受噪声的影响,效果可能不太理想。VLSAM主要依靠环境的纹理信息,IMU会随着时间的累计误差逐渐增大,GPS的使用则局限于室外开阔的条件。若单一使用传感器则无人机的导航实用性不高,实际应用中经常是将二者甚至是三者结合起来使用,导航的精度会得到显著的提高。
目前的视觉惯性里程计(VIO)是在无人机是应用最多的导航设备之一,在前面的部分已经略有涉及,IMU提高的角速度和加速度在短期内的精度很高,但是长期使用可能会发散。SLAM则对于纯旋转或者无纹理的环境会跟丢,但是两者的结合优势互补,效果显著。ROVIO[39]是Bloesch提出的一种将视觉和IMU进行融合的视觉惯性里程计,该算法将光度误差放入到迭代卡尔曼滤波进行更新。目前VIO的主要融合框架分为松耦合和紧耦合。松耦合是指IMU和SLAM给出各自的信息,通过一些融合算法,比如EKF,UKF等进行两者的信息融合。相比于松耦合,紧耦合是指IMU状态变量和相机的状态放入一个误差方程进行优化。通常情况下,紧耦合具有更好的定位效果。
4 结束语
本文从视觉SLAM的基本框架开始谈起,第一部分介绍了前端提取、数据关联、后端优化、建图等4个部分的基础知识。第二部分介绍了国内外的著名实验室和经典的SLAM方案。第三部分对用于UAV平台的SLAM研究重点问题进行了系统的介绍,包括:多无人机协同的SLAM,深度学习应用于SLAM和语义建图,以及多传感器融合的SLAM在无人机上面的应用。
近年来,多旋翼无人机在民用领域和非国防的领域发挥着越来越重要的作用,相机等传感器成本价格的降低也在促进这以视觉为首的SLAM建图定位技术的发展。在未来,无人机对于传感器有着小型化和轻量化的需求,此外,动态场景下的环境感知、目标跟踪、语义建图和复杂环境下的避障和救援等都是未来的研究者需要优化和解决的问题。研究者还将致力于提高系统的鲁棒性和计算能力才能满足未来市场的需求,而这同样对于无人机搭载的硬件提出了更先进的要求。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
建材发展导向(2022年3期)2022-04-19
今日农业(2021年8期)2021-11-28
建材发展导向(2021年11期)2021-07-28
中国科技纵横(2020年13期)2020-12-11
现代信息科技(2020年22期)2020-06-24
山东工业技术(2019年16期)2019-07-19
科技与创新(2018年12期)2018-06-22
长江学术(2016年4期)2016-03-11
新高考·高一物理(2015年5期)2015-08-18
