
自主行走植保车的设计与试验研究
2021-08-20 10:29:42秦伟桦冉云亮朱晨辉秦超彬王万章
农业装备与车辆工程 2021年7期
秦伟桦,冉云亮,朱晨辉,秦超彬,王万章
(1.472000 河南省 三门峡市 河南省烟草公司三门峡市公司;2.450002 河南省 郑州市 郑州容大科技股份有限公司;3.450002 河南省 郑州市 河南农业大学 机电工程学院)
0 引言
随着科学技术发展,人们越来越重视对烟草的研究。烟草的高经济价值历来举世公认,在增加国民经济方面意义重大[1-2]。近年来,卫星导航、信息无线传输、传感器和控制技术等加速了智能化农机的设计和开发,但在烟草农业生产中,烟草植保、打顶等环节还未实现机械化,生产过程劳动强度大、费时、费工[3],严重制约了我国烟草规模化及机械化种植[4]。
在田间管理车辆的研究方面,陈勇[5]开发研究了自动除草的四轮驱动作业车,计算机从地面图像中识别出杂草目标,再发出指令控制机械臂切割杂草并涂抹除草剂;王宝梁[6]设计了一款两轮驱动的作业车,并针对叶菜类蔬菜进行喷洒和机械除草作业;刘路[7]以机械化种植并生长到中后期的玉米为研究对象,应用了一款履带式作业车搭载弥雾机,在作物行间大面积均匀施药展开技术研究;尹振波[8]在已有底盘的基础上,用一种小型两驱电动四轮车,研究了超声波避障功能;张一星[9]设计了一款两轮驱动的作业车,使用电动车轮毂电机;车延超[10]设计了一款变量喷洒的作业车,使用电动车轮毂电机,基于图像进行施药;白如月[11]等设计了一种可以在作物行间自主行走的施药机器人,实现植保作业车在温室内的自动行走并均匀施药;陈黎卿[12]等设计了一种遥控喷雾机,行驶速度在2~10 km/h,使用阿克曼转向原理,设计了四杆转向机构。
本文根据烟草种植农艺和植保作业需求,设计了一款自主行走时植保作业车,搭配喷雾系统作业部件,可实现烟草田间自主行走喷雾作业,提高烟草病虫害防治机械智能化水平。
1 作业车结构设计
结合烟草田间植保作业要求,作业车的结构设计应充分考虑烟草的种植模式、作业期作物长势等因素,因此,设计距地间隙可以调整的作业底盘和轮距,使作业车能符合不同种植行距的烟草田间植保作业需求。作业车设计轮距为1~1.3 m,离地间隙为0.7~1.3 m;采用四轮驱动,动力由电动机提供。电机的控制能够满足智能化的应用。自主行走式植保作业车主要技术参数如表1 所示,结构如图1 所示。

图1 作业车结构图Fig.1 Structure diagram of the operating vehicle
2 主要部件设计
2.1 转向结构设计
折腰转向通过铰接的底盘单元来改变车辆的前进方向。在转弯期间,可以保持驱动元件提供最大推力,如图2 所示。采用中梁式车架,车轮与车架在平面内没有发生相对运动,提高了越野性能。转向机构不需要扭转梁和其他部件,优化了前后桥结构。转向时,两侧车轮不会相对车桥偏转,随着折腰角φ的增加,转向半径明显减小。通过理论分析,设计采用的轴距为 1 200 mm,前车梁与后车梁长度相同。
转弯瞬时半径中心(C)描述了作业车在大地坐标系下的旋转半径,可用于控制作业车进行路径跟踪。由于设定路径的每个小部分可以通过其曲率半径来描述,因此,可用作控制前后平台之间所需的折腰角度。
在l1=l2的情况下,l 取前后车架长度为 r1=r2。

作业车在转向过程中的内圈半径rmin为

外圈半径 rmax(最小转弯半径)为

当最大转向角为 50°,轮距为 1 000 mm 时,内圈转弯半径为 787 mm,最小转弯半径为 1 787 mm,适合全地形作业的转向需求。
由于作业车采用小型轻量化底盘结构设计,整体载重较小,所以采用电机主动转向。经查询,选用一款 48 V 直流减速电机,转速 72 r/min,最大输出扭矩达到 60 N·m。同时,设计了适用于折腰转向的齿轮传动系,减速比为6,经过齿轮传动系的传递,可以达到转向的使用要求。
2.2 轮距调整结构设计
轮距调整功能的实现需要将车架进行分离,目前应用较多的为液压推杆,通过双排链轮连接传动系,分别驱动前后桥底部的连接推杆,达到轮距调整的目的。本设计的轮距调整以机械结构调节为主,可提高轮距调整的稳定性和可靠性(如图3 所示)。调节装置与支撑柱之间使用 U 型螺丝进行固定,可以调整高度;装置横梁与车架横梁采用螺孔螺栓固定,可以调节轮距。
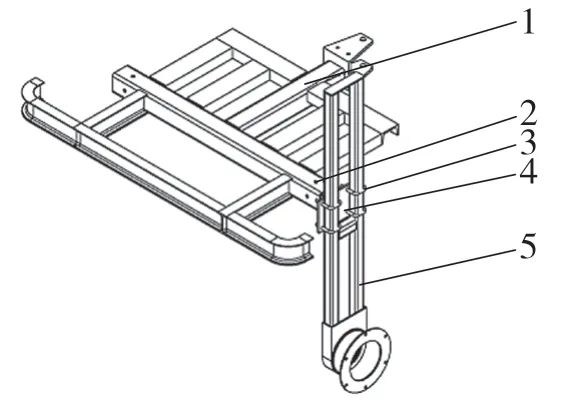
图3 底盘调节结构Fig.3 Regulatory structure of the chassis
2.3 喷雾系统设计
2.3.1 喷杆的设计
喷杆设计宽度为 6 m,喷杆折叠后的尺寸与轮距相差不大,可以更好地进行转场作业。采用多段式折叠的方法。在主喷杆与副喷杆的连接处,设计了一种可以按压旋转的结构,弹簧底座与圆管之间,使用梯形槽固定,弹簧上部与固定螺栓间安装有垫片可直接按压旋转。这种结构可以方便地进行折叠或展开,同时,保证作业时的平衡性和稳定性。
2.3.2 喷头、水泵和喷雾控制器的选择
喷头是植保作业中的关键部件,喷头的型号、数量和安装间距直接影响植保作业质量。结合烟草田间管理植保作业的农艺要求,本次设计采用喷嘴流量为 1,3 号蓝色喷嘴。因为作业车用电池作为能源,选用电动隔膜泵作为喷雾作业动力源,配置喷头 12 个,药箱容量 200 L,隔膜泵最大流量为 18.9 。设计选用变量喷雾控制器,可依据作业车的速度实现对喷雾机药液管路的流量控制,主要包括主控制器、GPS 接收器、流量计、压力传感器、速度传感器、比例控制阀、主阀和节阀。喷雾装置主要部件如图4 所示.。
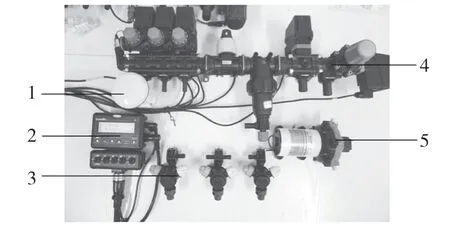
图4 喷雾装置Fig.4 Spray device
3 控制系统设计
3.1 主要部件的选择
自主植保作业车的控制模式采用手动和自动两种方式,可以使用遥控器进行人机交互。在自动模式下,可以输入预定路径的 KML 数据,植保作业车控制器通过读取 IMU 姿态信息和 GPS卫星定位信息调整转向,控制驱动电机按照预定路径自主行走。在作业过程中,作业车通过无线通讯模块实时回传位置和速度信息,在电脑或手机端可以进行查看并修改航线或行驶速度。
使用遥控器控制作业车时,可以进行模式切换并且手动控制作业车的油门、转向和喷雾药泵开关,基本原理为:手动发射信号由接收机接受并传递给主控制器,控制器根据信号值调整作业车的工作状态。设计采用遥控器工作频率为2.4 GHz,脉冲宽度调制(PWM)发送信号。采用 ATMEL 公司生产的 ATMEGA2560-16AU 型号的单片机作为行走作业车控制系统的核心,该类型单片机具有系统工作稳定、运算速度快、功耗低等特点。芯片的连通性包括EBI/EMI,I2C,SPI,UART/USART,外围设备具有欠压检测/复位,POR,PWM,WDT 等功能,可满足设计需要。
3.2 电路设计
设计采用典型的 IMU,包括三轴姿态陀螺仪和三轴加速度计,分别测量角速度和线性加速度。MPU-6000 将三轴加速度计和三轴陀螺仪集成在一个硅片上,具有较低的噪音,比较好的温度稳定性和精度。当连接到三轴磁强计时,MPU-6000 提供完整的 9 轴运动融合输出到 I2C 或 SPI端口。接口电路如图 5 所示。

图5 陀螺仪与单片机的接口电路Fig.5 Interface circuit of gyroscope and single-chip microcomputer
磁强计使用型号为 HMC5883L,精度在1~2°,可以通过 I2C 通信,具有简易的 I2C 系列总线接口。接口电路如图6 所示。
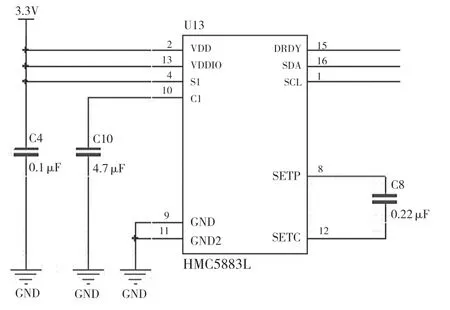
图6 磁强计与单片机的接口电路Fig.6 Interface circuit of magnetometer and single-chip microcomputer
针对所使用的驱动电机型号,设计适用于控制系统和电机之间连接的驱动模块,电机的转速调节主要依靠 MOSFET 场效应管,且控制系统经过滤波和 PID 调节对电机进行转速的调整。电路原理如图 7 所示。转向电机的控制电路需要用到继电器控制电机正反转,搭建了 H 桥,如图 8 所示。电路板实物图如图9 所示。

图7 电机驱动模块电路图Fig.7 Circuit diagram of the motor drive module
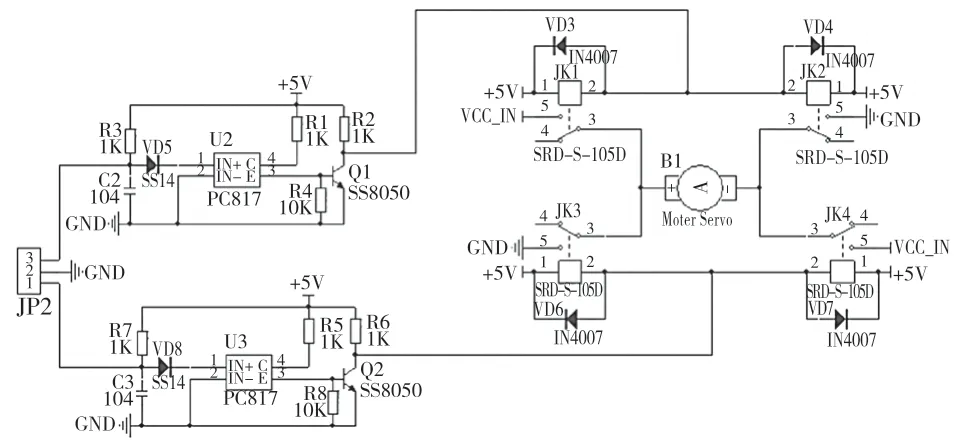
图8 转向电机控制电路Fig.8 Control circuit of steering motor

图9 控制系统电路板Fig.9 Circuit board of control system
4 样机性能试验
为了进一步验证植保作业车的设计是否符合要求,在河南省滑县某工厂进行了样机试验,主要对作业车转向性能、直线行走和续航时间等进行测试。实物样机如图10 所示。

图10 作业车样机Fig.10 Operation vehicle prototype
4.1 转向性能试验
作业车设计最大转向角为 50°,最小轮距1 000 mm。在轮距不变的情况下,植保作业车以3 km/h 的速度在干砂土地面上低速转向,自转一圈,可以得到作业车车轮的内侧和外侧轨迹(如图 11 所示),利用卷尺测量外侧轨迹可测得作业车的最小转弯半径为2 000 mm。

图11 转弯半径试验Fig.11 Turning radius test
4.2 直线偏移量试验
自主行驶植保作业车在田间行走时,直线行走的偏移率是评价控制系统的重要指标,具体的试验方法为:以设计的作业速度 6 km/h 在预定直线路径行走 100 m,测量终点与起点之间的偏移量,重复 5 次并记录数据(见表2)。由直线偏移量试验数据得出,平均偏移量为 5.51 cm,直线偏移量主要跟测试场地的平整程度和 GPS 精度有关。结果表明该植保作业车可以进行高效可靠的作业。

表2 直线偏移量试验数据Tab.2 Test data of straight line offset rate
4.3 续航时间测试
在试验场地内,在满载条件下以 6 km/h 的作业速度在预定区域内进行不间断的行驶,得到续航时间,共进行了 5 次试验,试验数据如表3所示。植保作业车满载情况下的续航时间平均值达到了2.54 h,符合设计要求。

表3 续航时间试验数据Tab.3 Test data of endurance time
5 结论
自主行走植保作业车,采用驱动电机推动折腰转向,车架距地间隙可调节,配合喷杆及喷雾装置和遥控器的自动控制,车辆机动性强,转向方便,控制灵活;植保车轮距调整范围为 1~1.3 m,适用于烟草田间跨垄作业及玉米、大豆不同宽窄行的植保农艺要求,适用范围广,推广价值高;作业车最小转弯半径为 2 mm,直线偏移率 0.05 m,续航时间 2.54 h。试验结果表明,样机性能参数基本达到设计要求。
猜你喜欢
奥秘(创新大赛)(2023年3期)2023-05-06 01:48:20
时代汽车(2022年12期)2022-06-24 23:00:11
广西植保(2021年4期)2022-01-06 07:55:00
今日农业(2021年17期)2021-11-26 23:38:44
内燃机与配件(2021年14期)2021-09-10 07:22:44
新农业(2017年2期)2017-11-06 01:02:23
浙江中西医结合杂志(2017年2期)2017-01-12 18:23:59
北京汽车(2016年6期)2016-10-13 17:07:38
新农业(2016年22期)2016-08-16 03:34:45
中国工程机械学报(2016年6期)2016-06-21 15:06:41
