基于PSIM的独立光伏发电系统仿真与实验教学设计
2021-08-19 02:25杜玉晓蔡梦婷唐雄民
实验室研究与探索 2021年7期
刘 洋, 杜玉晓, 蔡梦婷, 唐雄民
(1.广东工业大学自动化学院,广州510006;2.中国电子科技集团公司第七研究所,广州510000)
0 引 言
太阳能是一种绿色、环保、可再生的能源。为充分利用太阳能,提高光伏发电系统的能量转换效率,通常采用最大功率点跟踪(Maximum Power Point Tracking,MPPT)的控制策略[1]。在电气工程及其自动化专业的本科教学过程中,按照新工科的要求,不仅要让学生理解和掌握最大功率点跟踪的基本概念、原理和方法,还要进一步启发学生开展应用,尝试算法改进和仿真研究,开展实验设计与验证,培养学生的综合应用和实践能力。
传统的MPPT方法包括恒定电压法、电导增量法和扰动观察法[1]。但其跟踪性能受到光照强度变化的影响。对此国内外专家学者提出了一些改进方案:文献[2]中基于扰动观察法提出一种调整步长的功率预测算法,但调整步长系数的算法比较复杂。文献[3]中采用扰动步长自寻优化方法来改进传统的电压扰动法,但步长实时调整会引起震荡。文献[4]中提出了一种基于改进型变步长电导增量法的MPPT算法,但变步长因子选择依赖于设计人员的经验。文献[5]中将扰动观察法和二次插值法相结合提出一种更准确的MPPT方法,但插值法的参数设计存在不确定性。文献[6]通过间隔半周期采样进行功率预测,结合变步长扰动观察法进行MPPT控制,这对系统的快速计算能力有很高的要求。还有学者采用模糊控制[7]、遗传算法[8]、量子粒子群算法[9]、集合智能算法[10]和对比估计法[11]等来提高MPPT跟踪性能,但算法比较复杂,对硬件要求较高,对本科生的学习也存在一定难度。
本文提出一种近似梯度变步长电压扰动观察法来减小光照强度变化对MPPT的影响。基于PSIM仿真软件,分别在光照强度恒定和变化情况下,对定步长电压扰动和改进的变步长电压扰动算法进行对比研究。利用搭建的实验教学平台,对3种不同MPPT算法开展性能测试和验证。
1 MPPT基本原理及方法
太阳能光伏电池随着光照强度和温度的变化,有不同的输出伏-安特性和功率-电压特性,有不同的工作点。为了最大限度地利用太阳能,提高光伏发电系统能量转换效率,需要实时地检测光伏电池的输出电压和负荷电流,控制光伏电池的工作点始终在最大功率点附近,这个过程称为最大功率点跟踪[1]。传统的MPPT控制方法主要有以下3种[1]:
1.1 恒定电压法(Constant Voltage Tracking,CVT)
这是一种最简单的MPPT控制算法。根据图1所示的光伏电池P-U特性,忽略温度的影响,光伏电池最大功率点的电压uMPP与开路电压uOC存在近似线性关系:

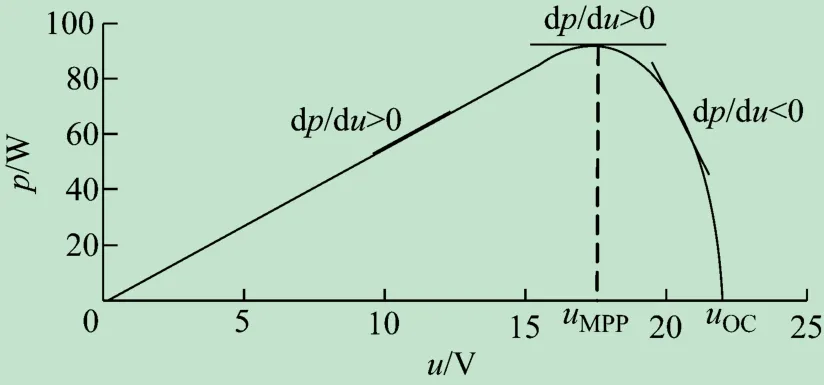
图1 光伏电池P-U特性曲线
如果将光伏电池和负载之间的阻抗进行变换,使得它的工作点始终稳定在某个光照下所对应的最大功率点的电压值,就能大致保证在该光照强度下光伏电池板输出最大功率。这样,就把最大功率点跟踪简化为恒定电压跟踪。
1.2 电导增量法(Incremental Conductance,INC)
在P-U特性曲线上寻找功率对电压导数为零的点,即满足d p/d u=0的点为最大功率点。

在温度、光照强度一定的前提下,电导增量法通过比较光伏电池电导的变化量与瞬时电导来决定电压变化的方向。根据图1,其算法如下:
(1)当光伏电池的工作点位于最大功率点的左侧,d p/d u>0,即d i/d u>-i/u,说明电压应该向着增大的方向变化;
(2)当光伏电池的工作点位于最大功率点的右侧,d p/d u<0,即d i/d u<-i/u,说明电压应该向着减小的方向变化;
(3)当光伏电池的工作点位于最大功率点处,d p/d u=0,即d i/d u=-i/u,此时电压将保持不变,光伏电池稳定地工作在最大功率点。
1.3 扰动观察法(Perturbation and Observation,P&O)
假定环境温度和光照强度保持不变,扰动观察法是先通过算法来扰动(增大或者减小)光伏电池的输出电压,再观察输出功率的变化来决定下一次电压的扰动方向,如此反复,让工作电压向最大功率点方向移动,直到光伏电池的工作点到达最大功率点。具体算法见表1[1]。
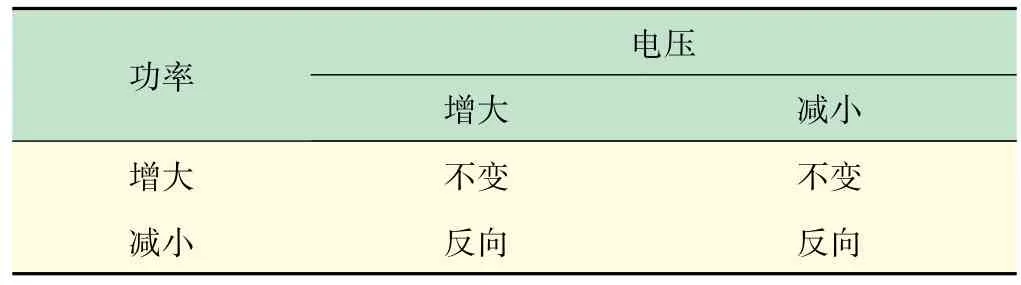
表1 扰动观察法中电压扰动方向判别
对以上3种传统的MPPT方法进行比较可知:恒定电压法最简单,检测参数少,对硬件电路要求低,但转换效率低,实际控制效果差。电导增量法控制效果好,对系统的硬件要求很高,要求能进行高精度采样和快速计算。扰动观察法控制比较简单,控制效果较好,但定步长的电压扰动会因光照强度和温度的剧烈变化引起误判,在最大功率点附近存在振荡现象,造成能量损失,导致能量转换率降低。
在实验教学过程中启发和指导学生将3种方法结合,通过改进MPPT算法来提高跟踪性能,并通过虚拟仿真和实验平台进行验证。
2 近似梯度变步长扰动观察法
梯度下降法又称为最速下降法,是求解无约束优化问题最简单的方法之一。在求解函数的最小值时,将目标函数的负梯度方向作为每步迭代的搜索方向,每次迭代使得目标函数逐步减小,逐步逼近函数的最小值。最大功率跟踪问题可以看作求解光伏电池P-U
曲线上功率的最大值,即最大功率点[12]。为改善定步长扰动观察法的不足,引入梯度的计算,将负梯度方向变成正梯度方向来求解。
设光伏电池输出电压为u,p(u)是以u为单变量的功率函数,它为连续可一阶微分的非线性函数。若当前工作点的输出电压为uk,输出电流为ik,输出功率为pk,参照电导增量法,当前工作点的梯度值的模可以表示为功率对电压的导数的绝对值:

光伏发电系统经电压扰动后,无论是正方向扰动,还是负方向扰动,下一个采样周期的工作电压为uk+1,输出电流为ik+1。将功率函数在连续域的导数用离散域的一阶差分法近似表示:

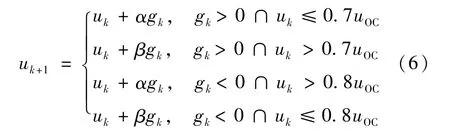
结合恒定电压法与扰动观察法,将输出电压细分为3个区间,处在不同区间的工作点的扰动电压采用不同的扰动步长。为在P-U曲线上更快地搜索到最大功率点,引入常数α、β,使得扰动步长变化更明显,且α>β>0。当gk>0,说明当前工作点在最大功率点的左侧。由于P-U曲线的左半支较长且较为平滑,当uk≤0.7uOC时,为快速跟踪最大功率点,应该沿着电压正方向以较大步长增加电压,增加步长为αgk;当uk>0.7uOC时,为了对最大功率点跟踪更准确,应该沿着电压正方向以较小步长增加电压,增加步长为βgk;当gk<0,说明当前工作点在最大功率点的右侧,由于PU曲线右半支较短且较陡,当uk>0.8uOC时,为了快速跟踪最大功率点,应该沿着电压负方向以较大步长减小电压,减小的步长为αgk;当uk≤0.8uOC时,为了对最大功率点跟踪更准确,应该沿着电压负方向以较小步长减小电压,减小的步长为βgk。因此,近似梯度变步长的电压迭代公式可以表示为:
综上,改进算法的流程如图2所示。
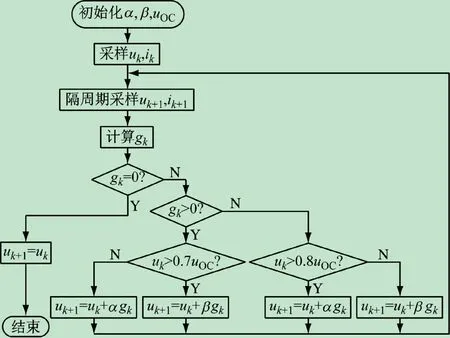
图2 近似梯度变步长电压扰动观察法工作流程图
3 虚拟仿真
PSIM是一款电力电子和电动机控制的仿真软件。该软件的用户界面友好、模型精度高、仿真和计算能力非常强大,不仅能进行单回路系统仿真,还可以与Matlab/Simulink进行联合仿真[13]。
在PSIM 9.0软件中,根据上文提出的改进MPPT算法搭建如图3所示的仿真框图,设置仿真参数,指导学生开展以下4个虚拟仿真。
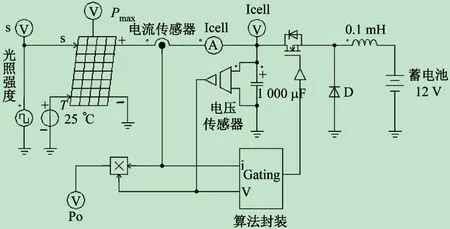
图3 基于改进MPPT算法的光伏发电系统仿真框图
仿真1当光照强度为1 klx,环境温度为25℃时,应用“Utilities”菜单中的“Solar Module”功能,绘制出光伏电池板的P-U曲线和I-U曲线,如图4所示。分析可知,最大功率点的输出电压为18 V,电流为5.54 A,最大输出功率可达100 W。
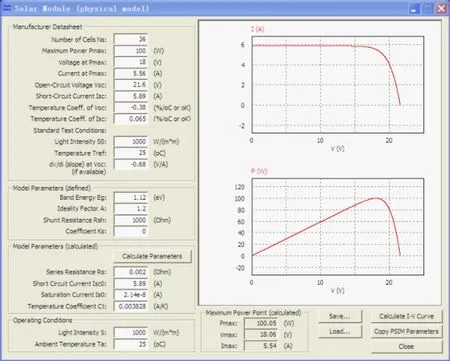
图4 光伏发电系统参数及特性曲线
仿真2当光照强度为1 klx,环境温度为25℃,均保持不变,采用定步长扰动观察法的MPPT控制,得到功率跟踪波形、充电电流和电压波形如图5、6所示。分析可知,当光照强度为1 klx不变时,系统可输出最大功率功率Pmax为100 W,而实际输出最大功率功率P0约为86 W,输出电压Ucell为14.8 V,蓄电池的充电电流Icell约为5.8 A,系统初始阶段充电电流和功率的波动幅度都比较大,在稳定阶段最大输出功率和输出电压都有震荡现象,并且实际输出功率曲线没有对最大功率进行很好地跟踪,跟踪误差约为14%。
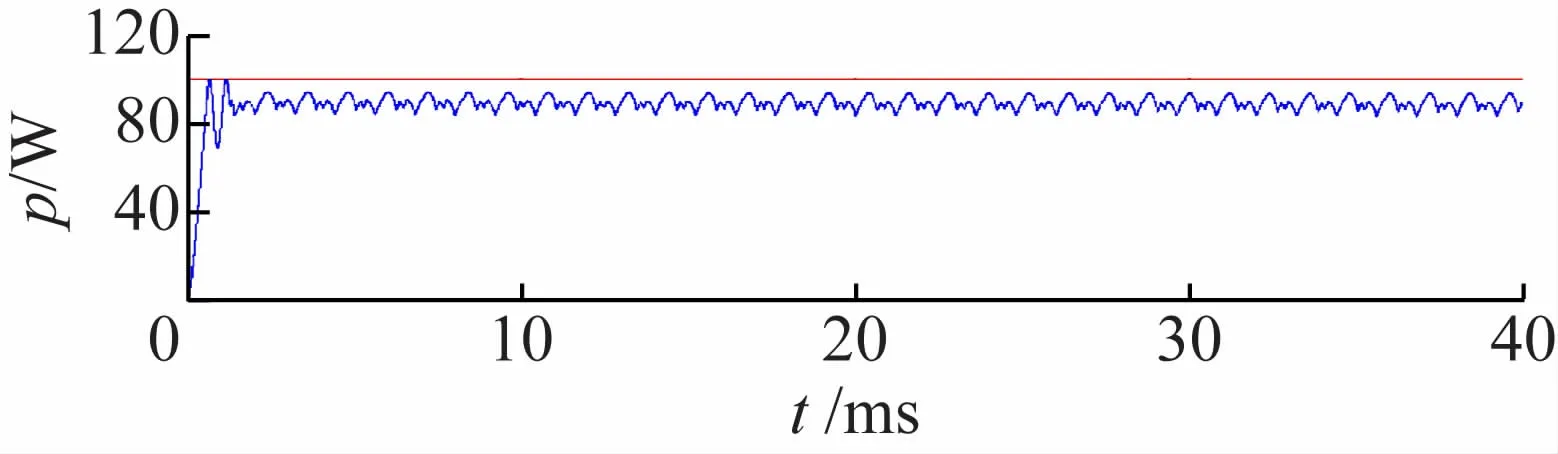
图5 光照强度为1 klx不变时定步长扰动观察法功率
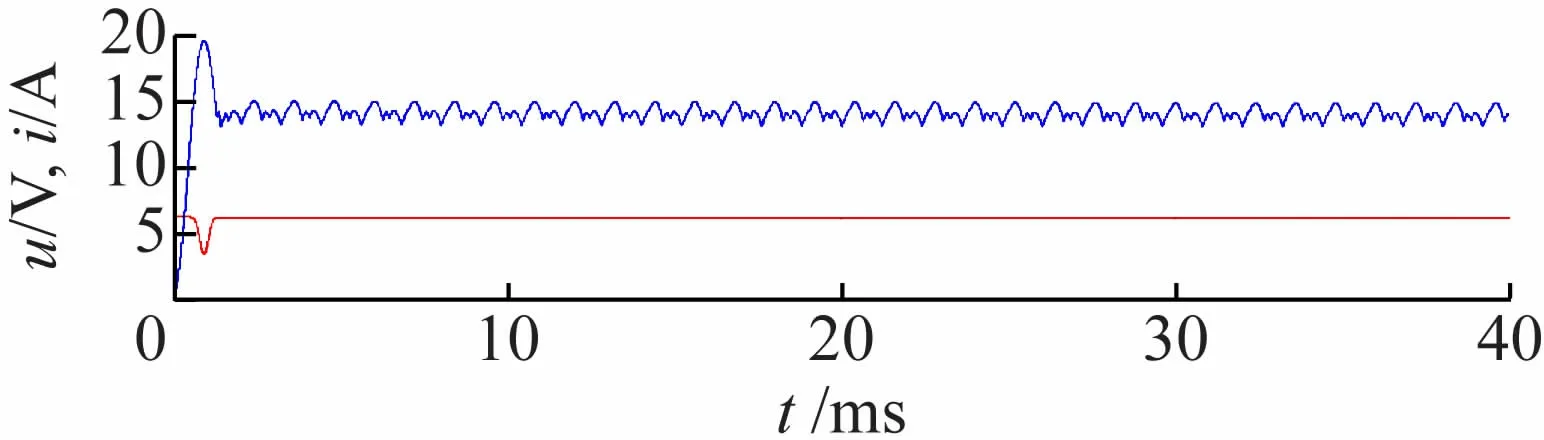
图6 光照强度为1 klx不变时定步长扰动观察法电压电流
仿真3当光照强度在0.8~1 klx周期性变化,环境温度为25℃保持不变,采用定步长扰动观察法MPPT控制,得到功率跟踪波形、输出电压和充电电流波形如图7、8所示。分析可知,当光照强度为800 lx时,系统可输出最大功率Pmax约为80 W,而实际输出功率P0约为72 W,输出电压Ucell约为14 V,充电电流Icell约保持5.2 A。当光照强度变为1 klx时,结果与仿真实验2一样。可见,当光照强度变化时,输出最大功率和输出电压都有较大震荡,最大功率点的跟踪误差高达10%。
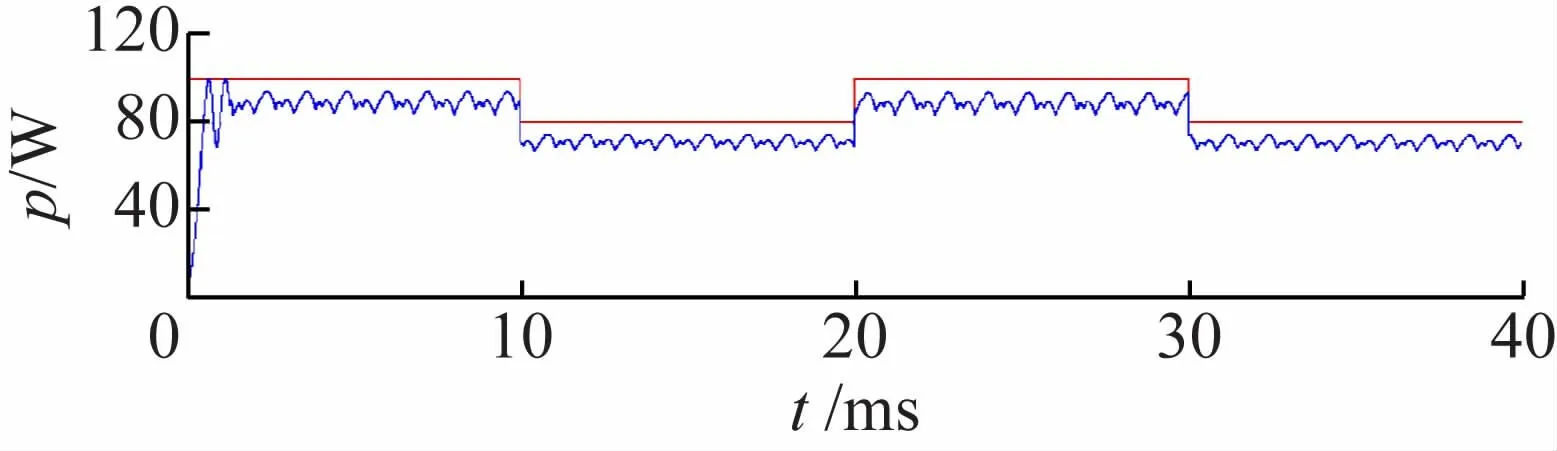
图7 光照强度变化时定步长扰动观察法输出功率波形

图8 光照强度变化时定步长扰动观察法电压和电流波形
仿真4当光照强度在0.8~1 klx周期性变化,环境温度为25℃保持不变时,采用改进步长的近似梯度扰动观察法,得到功率跟踪波形、充电电流和电压波形如图9、10所示。
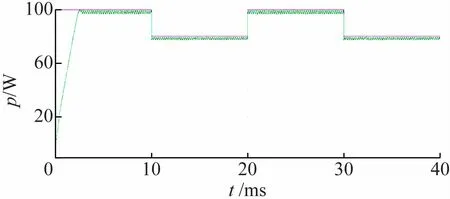
图9 光照强度变化时改进MPPT算法的输出功率
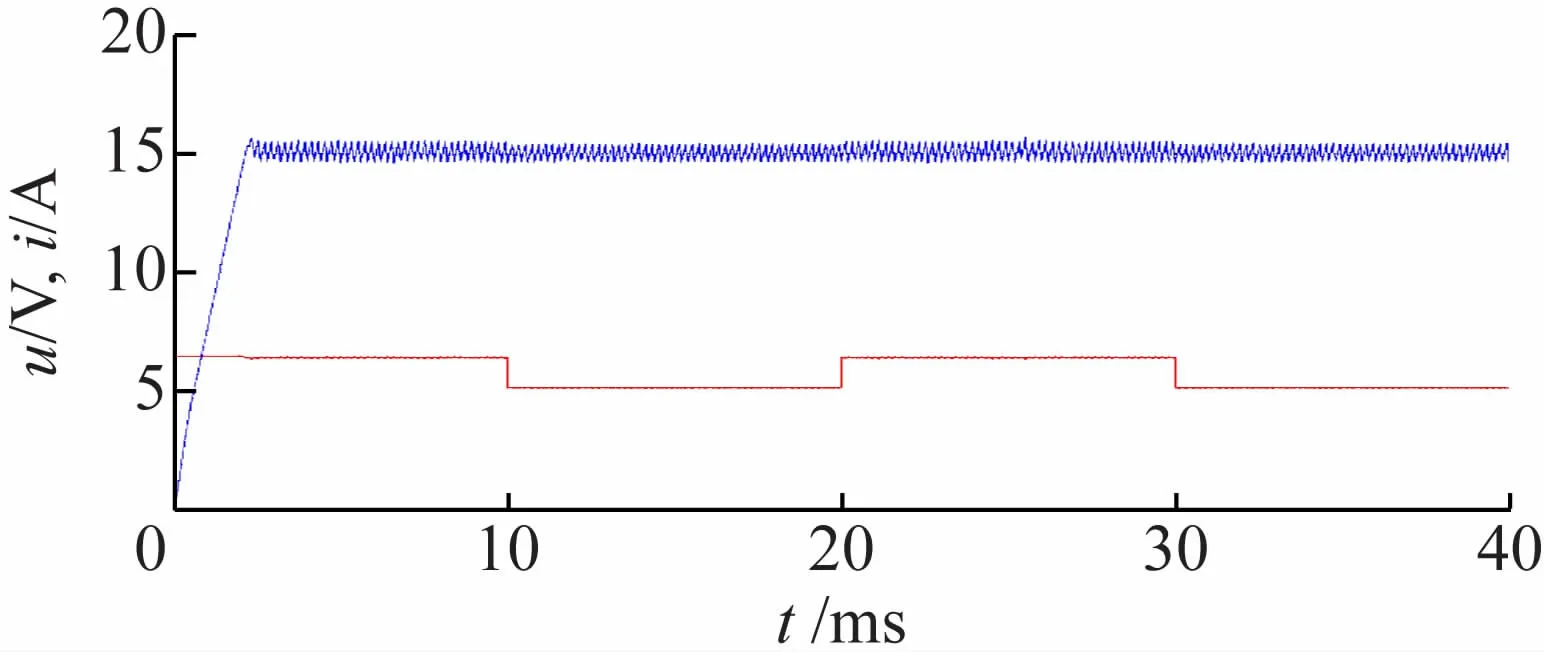
图10 光照强度变化时改进MPPT算法的电压电流
从图9、10可知,当光照强度为800lx时,系统可输出最大功率Pmax为80 W,实际输出电压Ucell保持15 V,充电电流Icell约为5.3 A,输出功率P0约为79 W,输出电压和功率的波动都很小;当光照强度达到1 klx时,系统可输出最大功率Pmax为100 W,实际输出电压Ucell仍保持15 V,充电电流Icell约为6.4 A,输出功率P0约为96 W。由仿真波形可知,采用改进的MPPT算法,光伏电池的输出功率能快速准确地跟踪P-U曲线上的最大功率点向外输出电能。
4 实验设计
采用如图11所示的光伏发电实验教学平台。其中,光伏电池板的型号为SP-100,几何尺寸为1 020 mm×670 mm×30 mm,最大功率100 W,开路电压21.6 V,短路电流5.89 A,额定光照强度1 klx,温度25℃。阀控式铅蓄电池型号为NP65-12,额定电压12 V,容量65 Ah[14]。

图11 光伏发电MPPT控制实验教学平台
为延长电池寿命和保证充电安全,设置蓄电池的最高充电电压为15 V,最大充电电流为6.5 A。蓄电池4阶段充电控制参数:充电使能电压10.8 V,过充电压14.7 V,浮充电压13.8 V,涓流充电电流0.26 A,恒流充电电流6.5 A,过充终止电流1 A。MPPT控制板以MSP430G2553单片机和UC3909充电管理芯片为核心元件,采用Buck结构的DC-DC降压斩波电路。在CCStudio环境下,用C++编写MPPT算法的源代码,其中α=1.14,β=0.86。
为将改进的电压扰动观察法与恒定电压法、电导增量法的跟踪性能进行比较,开展以下2个实验,得到的数据见表2、3。
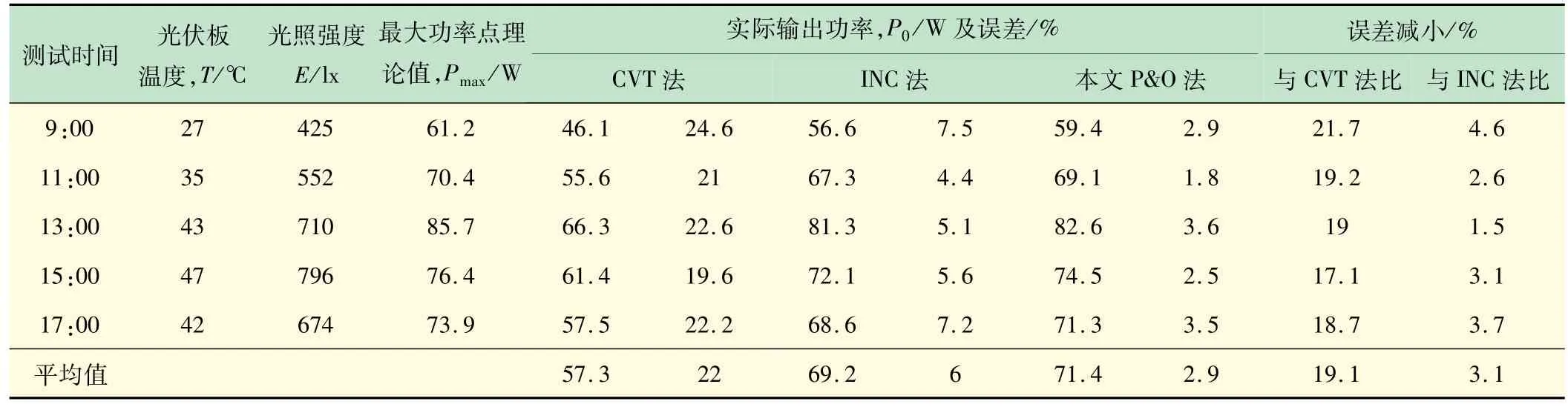
表2 光伏发电系统MPPT控制输出功率误差
实验1MPPT输出功率误差测试。在同一光照强度下,光伏发电系统实际输出功率与理论最大功率点的差值为输出功率误差。它反映出MPPT算法对最大功率点的跟踪准确度。
实验2局部遮光响应时间测试。在某一光照强度下,记录充电器输出电流值,再用遮光板将光伏电池板遮住一半,等待充电器输出电流稳定后,快速移除遮光板,记录电流恢复到遮光前电流值所用的时间,即为恢复到最大功率点的响应时间[15]。它反映出MPPT算法对最大功率点的跟踪速度。
由测试数据可知,采用3种不同MPPT算法,光伏发电系统都能够稳定地运行。表2中,本文P&O法的输出功率平均误差仅为2.9%,与CVT法相比,跟踪误差减小19.1%,十分明显;与INC法相比,跟踪误差减小3.1%,略有改善。表3中,本文P&O法的平均响应时间为2.1 s,与CVT法相比缩短了31%;与INC法相比缩短了28%。通过仿真对比可知,在光照强度变化时,与CVT法和INC法相比,近似梯度变步长电压扰动观察法对最大功率点的跟踪更快更准。
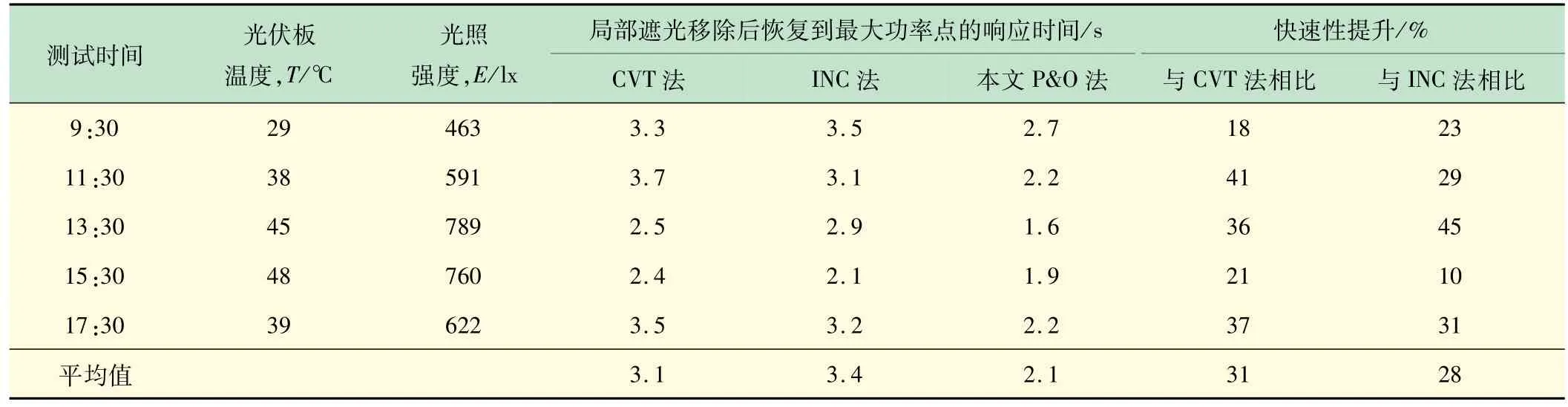
表3 光伏发电系统MPPT控制局部遮光响应时间
5 结 语
本文提出了一种基于近似梯度变步长电压扰动观察法的最大功率点跟踪算法。经PSIM虚拟仿真和实验平台测试结果表明,与传统的恒定电压法和电导增量法相比,该改进算法的跟踪更快更准。通过虚拟仿真和实验设计这两个不同层次的教学过程,能够加强学生对光伏发电系统最大功率点跟踪的基本概念、原理和方法的理解,更能够培养学生对所学知识的综合应用能力和实践能力。
猜你喜欢
健康护理(2022年3期)2022-05-26
电力勘测设计(2022年3期)2022-04-07
汽车实用技术(2022年5期)2022-04-02
河北理科教学研究(2020年2期)2020-09-11
中国新通信(2020年1期)2020-05-25
作文成功之路·小学版(2020年1期)2020-03-03
电子制作(2018年14期)2018-08-21
电脑知识与技术(2016年24期)2016-11-14
中学生数理化·高三版(2016年4期)2016-05-14
中国卫生标准管理(2015年8期)2016-01-15