芜湖市车路协同系统集成示范与应用
2021-08-18 04:08:44李军
城市建设理论研究(电子版) 2021年17期
李 军
安徽达尔智能控制系统股份有限公司 安徽 芜湖 241000
1 项目背景
为深入贯彻习近平总书记提出的“把论文写在祖国大地上,把科技成果应用在建设现代化的伟大事业中”的要求,以及2016年考察安徽时提出“要增强使命感,把创新作为最大政策”的重要讲话精神,积极落实长江经济带发展战略,充分发挥安徽省及芜湖市的区位资源、经济生态的优势。安徽达尔智能控制系统股份有限公司利用自身交通行业背景和技术优势,携手奇瑞新能源车和星马等主机厂,联合方特、海螺集团等开展智能车路协同系统集成示范与应用。开展智能车路协同与安全控制、道路交通智能联网联控、综合交通大数据分析与协同应用服务场景应用等关键应用技术研究和相关系统平台的集成应用开发和测试,建设封闭与开放环境相结合的新一代智能交通系统,推动具有芜湖特色的智能交通系统产业集群的发展。
2 建设范围
为了使项目顺利实施,选择以芜湖市弋江区外围道路不少于3公里的开放道路,以及海螺集团特种车辆工作区域约3.5公里的封闭道路,结合本项目建设内容,对上述道路进行改造,使其成为可以对智能网联汽车、车联网的各种装置、设备、设施进行多种道路环境(多车道、十字路口、T字路口、模拟隧道等)及多种天气条件下的智能交通示范场地建设。
3 建设内容
芜湖市车路协同系统架构分为三层,分别是感知层、通讯层(多通道通信)、集成层和场景应用层,如图1所示。
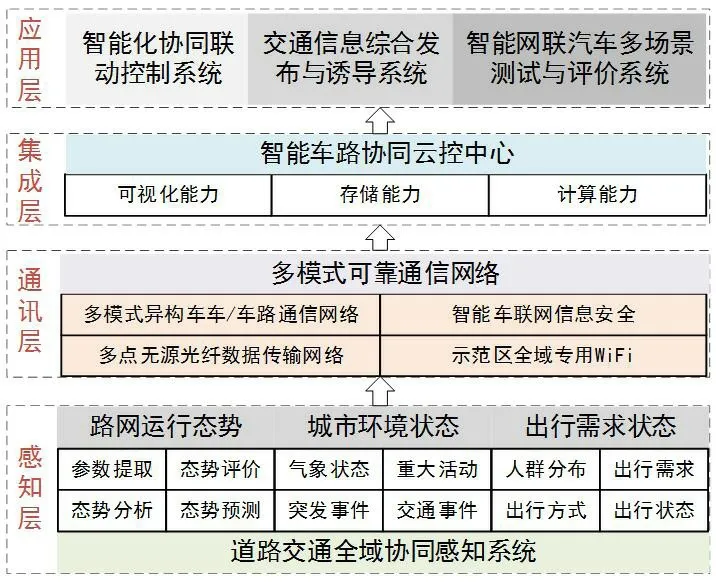
图1 芜湖市车路协同系统架构
3.1 道路交通协同感知系统
传统的感知系统,由于依赖固定检测器(地磁、视频等),只能获取道路的流量、密度和速度等交通状态参数,已经无法适应当前复杂多变的道路环境和动态时变的城市交通管控需求。因此,本项目提出并建设一种道路交通全域协同感知系统,打破了过去依赖固定检测器的缺陷,通过融合车路协同感知手段,使得新的交通感知系统在业务上得到了扩展,实现对气象状态、重大活动、突发事件以及交通事件等的实时监测;实现对人群分布、出行需求、出行方式等个体特征的全面监控,实现对路网状态参数提取、路网运行态势评价、路网运行态势分析和预测等状态的感知,通过多源数据的融合处理,提高了感知的速度和精度,实现了对城市道路的全域协同感知。
3.2 多模式可靠通信网络系统
3.2.1 示范区全域专用WiFi
为了建设覆盖示范区全域的专用WiFi系统,为示范区的智能车载设备和路侧设备数据传输提供支撑。本项目计划每500m安装1个WAU(无线接入单元),总带宽500M。
3.2.2 多模式异构车车/车路通信网络
本项目拟基于智能车载设备和智能路侧通信设备搭建多模式异构车车/车路通信网络,为用户提供了丰富的无缝接入服务。在异构网络中,车载终端可以通过多样化的无线通信技术获得通信服务,这些无线接入技术主要包括移动网络(4G/未来5G),无线局域网(Wireless Local Area Networks,WLAN),专用短程通信(Dedicated Short Range Communication, DSRC)等。
3.3 车联网信息安全
信息安全作为智能交通系统的关键, 本项目从系统的层面构建面向信息安全的架构并实现其应用。
车载端方面,在ISO26262的架构体系内,构建智能网联汽车信息安全与功能安全的映射模型,在智能化程度密切相关的车载传感器方面开展摄像头、雷达等多种传感器的信息安全评估,同时联合信息安全研究机构及整车企业,开发智能车载终端的IDS入侵检测系统。
在车联网的网络层面,通过构建汽车和外部设备通讯、以及V2X网络内的分布式可信机制,实现低资源消耗的可信认证;同时能够实现基于手机的电动汽车信息交互安全评估。
3.4 智能化协同联动控制系统
系统包括基于车路信息交互的交叉口优先通行控制,保障公交、应急车辆等通行效率;城市路网干线运行协调控制动态寻优技术以及过饱和状态下城市主干道协调控制,实现中等城市主干道交通流动态协同,提升中等城市交通干线的效能和服务水平;数据驱动下的中等城市控制节点协调联控,提升路网整体效能。
3.4.1 智能网联信号控制系统
智能网联信号机具有感应、公交优先、自适应控制等多种控制方式。信号机既可通过参数配置工具进行信号机参数配置与控制,也可以在系统协调下执行控制中心下发的系统协调控制方案以及管制、临时方案、特种车辆优先等特殊方案。项目在示范区交叉口布置新型15台智能联网信号机,保障控制节点的协调联控,包括测试区十字形路口10个,T形路口5个。
基于智能联网信号机,通过对路网交通状态感知信息分析,搭建城市交通智能联网联控系统,实现交通信号智能联网条件下的各种应用研究。包括基于车路信息交互的交叉口信号优先控制,保障公交、应急车辆等通行效率;城市路网干线绿波协调控制,实现城市主干道交通流绿波通行,提升城市干道交通的通行效率和服务水平。
3.4.2 交通信息综合发布与诱导系统
交通信息综合发布与诱导系统是在梳理智慧出行业务流程的基础上,结合不同旅客出行的需求,分析智慧出行的切入点建立以“感知”技术为基础,以“出行信息服务”为核心的信息综合发布与诱导系统。通过搭建城市智能联网诱导系统,提供基于物联网感知技术与大数据技术的旅客全过程智慧出行服务。交通信息综合发布与诱导系统分为三个层次:数据采集与处理层,数据储存层和优化处理层。数据处理层主要完成多源数据的清洗,以及结构化整理工作,在整理完成后根据需要计算交通状态的相关参数,同时将整理后的数据存入数据库。数据储存层,主要负责数据的存储与服务功能。优化处理层,诱导策略对交通状态的改变将反馈给信号控制模块,进行双向的优化计算,并将输出方案存储进数据库中。
3.4.3 个性化信息订制与推送系统
个性化信息订制与推送系统主要为出行者提供信息推送、旅程规划等服务。通过集成多渠道和旅客出行有关的信息源,在旅客出行时,为旅客制定的家到家的旅行规划,包括出发地市内交通、城市间旅行、目的地市内交通,同时可通过与当地交通部门合作,实现旅客一票出行;在旅客选定行程后,可根据行程安排和列车信息、航班信息、市内交通路况信息,择时向旅客提供参考信息。
3.4.4 电动汽车智慧出行服务系统
项目在方特景区建设微循环电动小巴智慧出行服务系统,开展微循环电动公交车运行示范,形成景区微循环交通模式,研究智能、环保、节能微型公交系统的关键技术和推广应用。
3.4.5 道路交通安全预警系统
搭建道路交通安全预警模型,通过路侧的预警设备和车载预警设备,基于车路协同的道路交通状态和车辆状态,通过道路交通安全预警系统,完成基于大数据的道路异常状态监控和预警。
3.5 智能网联汽车多场景系统建设
智能网联汽车场景的建立需面向芜湖市道路交通环境,满足智能驾驶车辆在各种道路类型、各类交通标志及信号,面对不同的交通状态以及天气条件下的不同功能模块(包括环境感知系统、算法决策系统以及车辆控制系统)及车辆整体性能的测试需求。另外,需要对随机、复杂的道路交通场景进行采集与分类管理,智能驾驶测试场景库将覆盖不同道路类型、不同路况、不同交通运行状态以及不同气象等条件的智能驾驶场景数据,可以为智能驾驶技术研究、产品开发、试验验证、认证管理、示范区建设、行业标准法规研究制定等提供数据支撑。
系统从场景库的建设目的出发,根据场景库的功能需求分析设计场景库不同的功能子系统如场景库采集子系统、数据处理子系统、场景库管理子系统、场景库应用系统等。使场景库具备场景数据重演,重现车辆在真实道路场景的反应,实现车辆的大样本快速模拟测试的能力;具备通过对场景数据的定制,满足不同类型智能驾驶系统测试的需求的能力;具备提取场景库中典型场景数据,在真实封闭测试场地内进行场景复现,实现对智能驾驶车辆真实表现的测试与评估的能力。
3.6 智能车路协同云控中心系统
智能车路协同云控中心系统将构建分布式计算集群,采用虚拟化技术,形成面向大数据处理服务的计算环境。通过部署以Hadoop+MapReduce为核心的各种大数据处理软件系统和专项数据处理软件,实现面向交通大数据的处理能力。
智能车路协同云控中心可以实现数据接入与管理、数据汇聚与转发。中心设计数据接入能力应达到200Mbps、100万条/秒交通数据实时接收,同时具备PB级的数据存储和管理能力。数据存储支撑包括对多种数据存储格式的支持,如关系型数据库,分布式文件系统及NO-SQL新型分布式数据库。
智能车路协同云控中心的可视化显示能力,通过对各种计算机图、文及网络信息、视频图象信息的动态综合显示完成各种信息的显示需求。
4 建设成效分析
依托芜湖市车路协同系统集成示范区建设面向安全和高效出行的芜湖市车路协同集成测试与应用示范环境,以对接科技部“十三五”重点研发专项“综合交通运输与智能交通”中“载运工具智能协同”板块任务,为示范区道路交通的周转疏解以及日常出行提供移动互联的智慧服务,打造不同等级智能车辆行驶的半开发/开放集成测试环境与面向智能网联汽车的交通管理与控制技术的研究和开发平台,建立芜湖市首个面向智能车路协同研究的实景外场应用测试环境,对于促进相关产业在芜湖市的快速聚集和加速发展具有重大,也为我国相关产业的转型升级做出积极的贡献。
5 总结
芜湖市车路协同系统集成示范与应用采取科技提升与工程建设相结合的思路,依托工程建设实现车路协同系统功能,面向未来智能交通发展技术需求开展创新研发、示范与应用。通过关键技术突破与系统集成,努力实现三个转变“基于协同感知下交通流参数检测到个体行为感知的转变”、“移动互联环境下的交通管控与运输组织形式的转变”和“交通即服务理念下的系统运输服务模式的转变”,打造成集科技创新、应用测试、功能验证、成果转化和示范效应于一体的综合实景外场环境。
本项目选择芜湖市弋江区外围道路不少于3公里的开放道路,以及海螺集团特种车辆工作区域约3.5公里的封闭道路,建设半封闭以及开放交通道路场景的车路系统集成测试与示范环境。在搭建道路交通全域协同感知系统的基础上,通过建设多模式可靠通信网络和车路协同云控中心,开展智能化协同联动控制、交通信息综合发布与诱导以及智能网联汽车多场景测试,为促进芜湖市车路协同系统创新技术应用建立了重要的基础,有效推动具有芜湖特色的智能交通系统产业集群的发展。
猜你喜欢
中国水利(2023年19期)2023-11-09 07:56:50
中国水利(2023年17期)2023-09-25 07:42:10
中国水利(2022年20期)2022-11-18 06:26:32
工业经济论坛(2020年6期)2020-04-13 00:38:20
汽车维修与保养(2019年4期)2019-09-11 05:48:58
汽车观察(2019年2期)2019-03-15 05:59:54
汽车观察(2018年12期)2018-12-26 01:05:26
汽车观察(2018年10期)2018-11-06 07:05:20
中国交通信息化(2018年12期)2018-03-21 05:52:32
现代制造技术与装备(2015年4期)2015-12-23 10:20:22