
一种船体减摇装置控制系统优化设计
2021-08-18 03:37蔡子聪
船舶标准化工程师 2021年4期
蔡子聪
(安徽理工大学机械工程学院,安徽淮南 232001)
0 引言
船舶行驶过程中,由于风力、水面激振力和船体运行中的振动等因素,船体势必会出现横摇,这些横摇会对船舶的正常行驶以及船舱内人员的舒适度造成影响。针对这些横摇,人们设计出一系列优化措施,舭龙骨、减摇水舱、减摇鳍等一系列减摇装置应运而生[1]。其中,减摇鳍是设计较为成功且应用较为广泛的装置,其发展可以追溯到 20世纪80年代。减摇鳍发展至今,已经演变成一种将液压系统和自动化控制系统相结合的装置[2]。本文针对减摇鳍的自动化控制系统,进行一种系统优化设计[3]。
1 船舶横摇模型
船身在多种因素的共同作用下会产生横摇,其中外部因素包括风力和水面冲击力等;而内部因素有螺旋桨激励振动和船体自振等。其中螺旋桨引起的激励振动是引起船体横摇的一项重要因素,其激励振动的频率公式为[4]
式中:K为激励阶数;Z为螺旋桨叶数;N为螺旋桨转速,rad/s。
螺旋桨转动时产生的脉动压力和螺旋桨的叶频表面力分别为
式中:D为螺旋桨直径,m;W为轴功率,J/s;k0为水翼修正系数;kα为根据螺旋桨轴和离螺旋桨桨叶最小距离的船底处的纵剖面线之间的夹角α的系数;kd为叶梢间隙比系数;d为叶梢距离船体底部的最小距离,m;k由d和D的比值以及螺旋桨叶数的系数确定。
2 系统优化传递函数计算
计算横摇角对于波倾角的传递函数,先运用杜埃尔公式来计算横摇转动惯量[5],见式(4)。

式中:M为船舶排水量,L;B为船舶型宽,m;z为船体重心高度,m;g为重力加速度,取9.81 m/s2。
所以船舶横摇周期为:

计算船舶横摇运动衰减系数为:

式中:k1=0.055~0.060,根据船体参数决定;ϕA为横摇幅值,rad;h为静水稳性高度,m;H为船舶型深,m。



经过优化设计后,船舶横摇角φ对于波倾角α的传递函数为:

该传递函数的输入值为船体横摇角,输出值为船体波倾角[9],横摇角参数由倾角传感器测得,并根据该函数得出相应输出波倾角的值。根据波倾角调节减摇鳍电机,以给定角±20°由空载启动的响应输出曲线见图 1,整个系统为开环控制系统,并由传递函数可得:当波倾角增大时,输入控制器的值为正值,减摇效果增大;当波倾角减小时,输入控制器的值为负值,减摇效果减小。

图1 电机响应曲线
当传感器检测到倾角信号不为0时,控制单元得出相应的波倾角数据对电机进行控制,电机接收控制信号迅速响应,上升时间小于2 s,且运动过程中较稳定,产生的误差较小。
经过优化之后,船舶在航行过程中由于风浪或船身自振而导致出现有害振动和横摇时,减摇系统的响应速度会得到提升,响应的精准程度会相应提高,从而使船舶行驶的安全性得到改善,同时可以在一定程度上改善船上人员的舒适性。
3 自动化控制系统优化设计
3.1 减摇鳍的伺服驱动系统
减摇鳍装置的硬件原理框图见图 2,电路的接口类型为RS232。控制单元先根据给定的横摇参数计算传递函数,再将优化后的输出值输入电路。硬件电路包括位置调节器、速度调节器、电流调节器和逆变器,这些装置串联到减摇鳍的电机上;外围电路并联有电流传感器、速度检测装置和位置检测装置,用于监测设备工作时的各项参数。
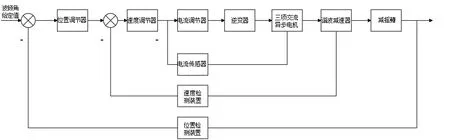
图2 伺服电机的系统结构图
3.2 控制电路仿真
仿真采用的控制硬件为AT89C51单片机[10],单片机的4个输出端分别接入每个减摇鳍控制部分的信号放大电路,通过仿真结果验证了该优化设计的可行性。图3是基于AT89C51单片机的减摇鳍控制电路仿真图,该仿真电路为自动化控制电路,在传感器接受振动和横摇信号时,该电路系统会自动对信号进行处理并输出修正信号,相比很多人工手动控制减摇的模式,该系统具有自动调节功能,可靠性和响应速度得到大幅提升,从而使船舶航行的安全性得到极大改善。

图3 控制电路仿真图
4 结论
通过引入横摇角这一概念,对船舶航行过程中倾摇程度进行了定量分析,根据横摇角计算公式所计算出的横摇角数值越大,则船体的倾摇幅度越大。通过对船体减摇控制系统的闭环控制函数进行分析和优化,能够缩减倾角传感器检测信号至控制器作出响应的时间,从而达到降低船舶横摇幅值的目的。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
时代汽车(2022年14期)2022-07-06
科学大众·小诺贝尔(2021年10期)2021-01-22
航空世界(2019年1期)2019-10-11
中学科技(2018年6期)2018-09-21
航空模型(2017年5期)2017-12-14
中学科技(2017年10期)2017-11-04
速读·中旬(2015年10期)2015-10-21
中学科技(2015年1期)2015-04-28
航海(2009年1期)2009-02-23
