船舶泵控式抗横倾系统的设计与抗横倾验证
2021-08-17 11:28宫尚军张磊姚兴田朱志松
船海工程 2021年4期
宫尚军,张磊,2,姚兴田,朱志松
(1.南通大学 机械工程学院,江苏 南通 226019;2.约克大学 拉松德学院机械工程系,加拿大 多伦多 M3J1P3)
近年来,由于船舶和航运行业的飞速发展,船舶设计日益朝大型化、自动化趋势发展[1]。船舶在港作业时,由于装卸载货物不规范导致船体稳定性下降进而引发船体倾覆的事件频发[2],因此控制船舶的平衡具有重要的研究意义。船舶抗横倾系统是船舶装卸载货物时保持船体横向平衡的重要设备[3],主要通过压载水的调节产生与船舶横倾相反的力矩来调节船舶平衡。已有的被动式U型减摇水舱[4],由于只能在有限的波浪频率范围实现减摇作用,存在局限性。Siemens公司根据其原理研制出主动式U型减摇水舱[5],但是由于该装置采用大功率鼓风机需要消耗大量的能量,增加了使用成本。德国英特灵公司研制出一种气动式抗横倾系统,广泛应用于世界上百艘的各类船舶,中国的“中铁渤海1号”和“粤海铁1号”都安装此抗横倾系统,日本IHI公司经过几十年的试验生产出成型的抗横倾系统[6]。有学者在气动式抗横倾系统中采用积分分离的控制算法[7],取得了良好的抗横倾效果。有学者将PID控制算法与模糊控制理论相结合使得气动式抗横倾系统满足良好的性能要求[8]。
综上所述,国内外研究机构和学者对调节船舶平衡的减摇水舱和气动式抗横倾系统进行了研究,而尚少见对于泵控式抗横倾系统的研究。泵控式抗横倾系统因其结构简单、所占空间小、调控方便等优点可以很好地进行船舶平衡的调控。基于此,考虑对船舶泵控式抗横倾系统进行分析,设计模糊PID控制策略,缩短船舶平衡调节时间,并通过设计出的泵控式抗横倾系统试验平台进行抗横倾试验,证明泵控式抗横倾系统的实用性。
1 泵控式抗横倾系统的结构组成和工作原理
设计的泵控式抗横倾系统用于模拟船舶在港作业上下货物产生的横倾状况,通过压载水的调节使船舶达到平衡状态。经过赴多家船厂实地考察,根据实船中压载舱的分布设计出泵控式抗横倾系统见图1。

图1 泵控式抗横倾系统示意
系统采用对称式分布,主要由压载泵、液位传感器、电磁阀和模拟水池构成,共设置12个压载舱用来调节船舶平衡和2个左右横舱用来模拟船舶装卸载货物,每个压载舱中都垂直安装1个液位传感器测量其液位值,为了真实模拟船舶4角吃水和横倾状态,在系统外侧4个角分别安装4个液位传感器,用来测量系统4角吃水深度。压载泵置于系统两侧的水池中,模拟实际船舶在港作业吸入和泵出外界海水,进行液位的调节。选用2 mm厚度的45钢作为压载舱的原材料,系统底部留有150 mm高度的隔层使其能够轻松浮于水面上。采用双套管路设计使得各压载舱之间既能独立注排水也能互相调拨压载水,可提高横倾补偿速率。
系统工作原理见图2。以右倾为例。在右横舱中加入适量负载模拟船舶上货,此时4角的液位传感器检测到系统左右液位差并将信号传递给控制系统,控制系统计算出实时的横倾角β,当横倾角β大于设定的倾角时,两侧压载泵开始工作,一边从外界向左侧压载舱中注水,一边将右侧压载舱中的水排出,此时系统的管路还在进行压载水的相互调拨,即右侧压载舱向左侧压载舱注水,当计算的实时横倾角为0°时系统停止工作。
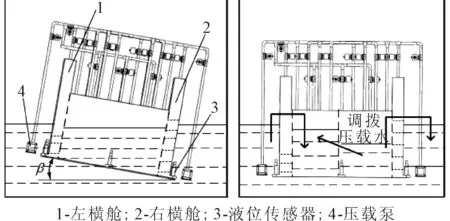
图2 泵控式抗横倾系统工作原理示意
2 船舶泵控式抗横倾系统数学建模
选取某集装箱船,船舶参数见表1。
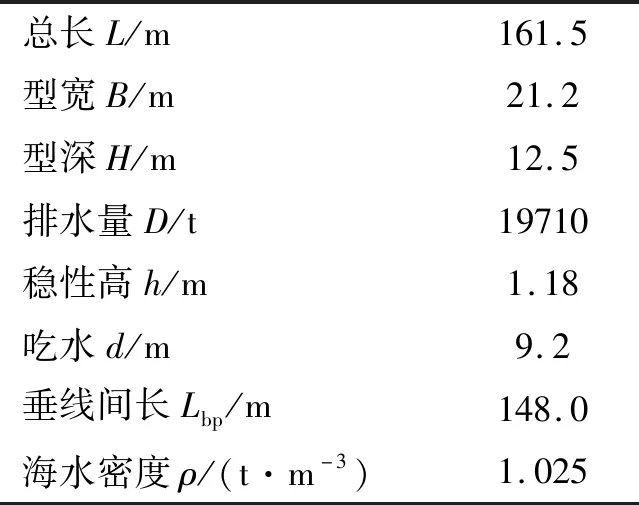
表1 船舶实际参数
2.1 船舶横倾运动数学模型
只考虑船舶在港作业时的横倾运动,不考虑船舶海上航行的推进力矩,忽略外部海风和海浪的扰动,故船舶横倾运动时所受的外力矩为装卸载荷引起的扰动力矩。根据Collony线性理论[9],船舶在小倾角横倾时,船舶横倾模型可近似表示为二阶线性微分方程。
(Ix+ΔIx)φ″+2Nφ′+Dhφ=Mr
(1)
式中:Ix为船舶转动惯量;ΔIx为附加转动惯量;Nφ为横倾阻尼系数;Mr为外力矩;h为稳性高;φ为横倾角;D为船舶的排量。
将船舶实际参数代入式(1)并对其进行拉氏变换可得到系统传递函数为
(2)
根据系统所得传递函数,在Simulink中建立船舶横倾运动模型,见图3。

图3 船舶横倾运动模型
2.2 船舶-泵控式抗横倾系统数学模型
船舶-泵控式抗横倾系统是基于外力矩同步补偿的高效率抗横倾系统,利用泵和阀门控制各压载舱内水的流动,产生抗横倾力矩来平衡船舶横倾的外力矩,使船舶恢复平衡。根据船舶动力学理论可得泵阀执行机构产生的抗横倾力矩为[10]
(3)
式中:MK为抗横倾力矩;ρ为压载水密度;MW为调拨的水量;Rn为一侧单个压载舱中心线到船舶中心线的距离。
船舶调节平衡所需的压载水通过气动蝶阀组和压载泵的开关来控制,蝶阀调拨的水量为

结合船舶横倾运动方程和抗横倾力矩公式可以得到船舶-泵控式抗横倾系统数学模型为
(5)
根据船舶泵控式抗横倾系统数学模型建立其Simulink模型见图4,主要包括外部载荷、调拨水量、参数计算和船舶横倾运动模型等模块。
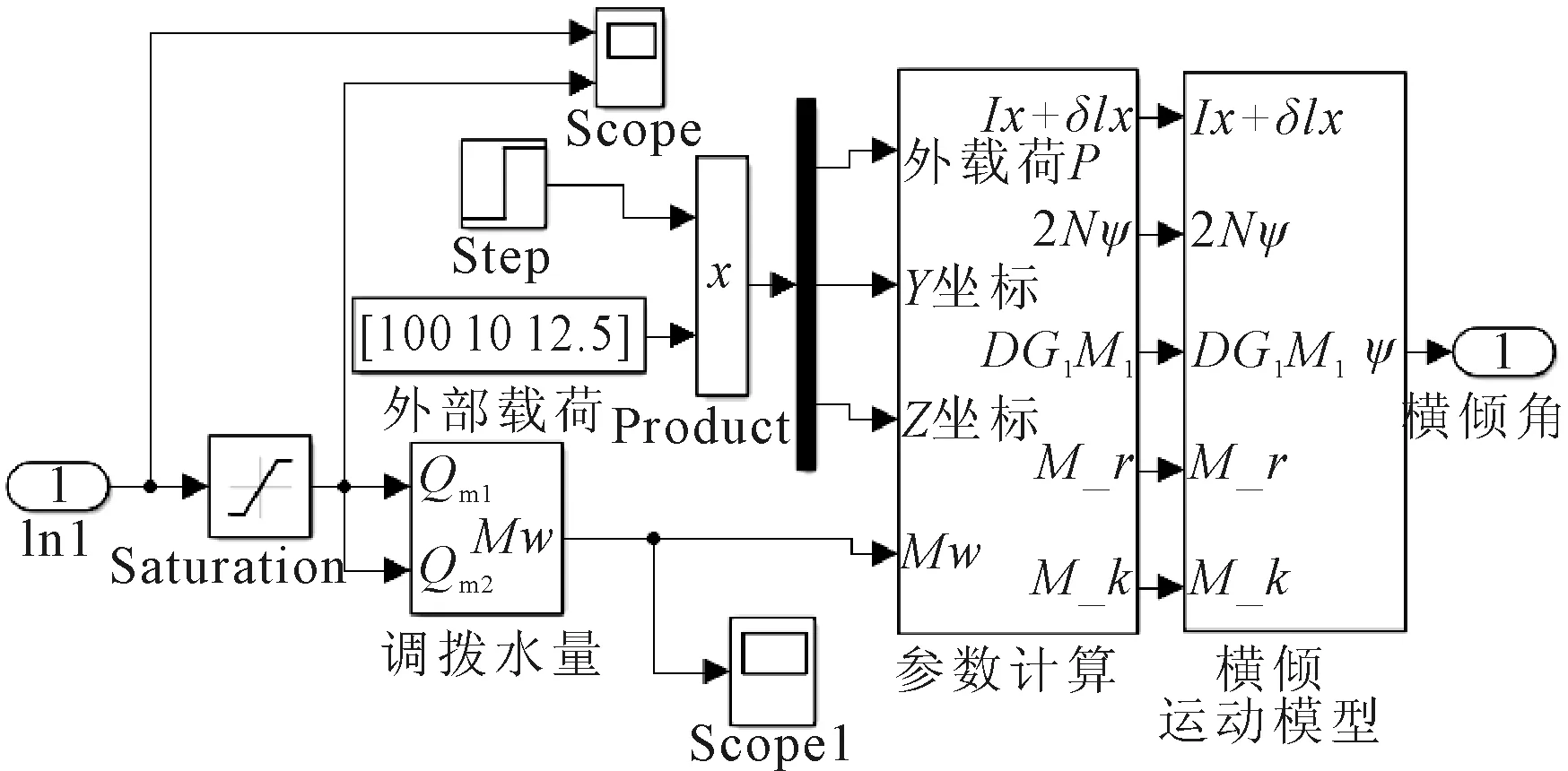
图4 船舶泵控式抗横倾系统simulink模型
3 模糊PID控制器设计
对于船舶平衡的调节,采用PID控制虽然可以达到调节平衡的目的,但是调节时间长、系统超调量大,为了解决这一问题设计出一种模糊PID控制器[11]。图5所示为模糊PID控制器应用原理图,模糊PID控制器由模糊控制器和PID控制器两部分组成,以偏差e和偏差变化率ec作为输入量,ΔKp、ΔKi、ΔKd作为输出量,根据建立的模糊控制规则,实时调整PID 3个参数。模糊PID控制的参数计算公式如下:
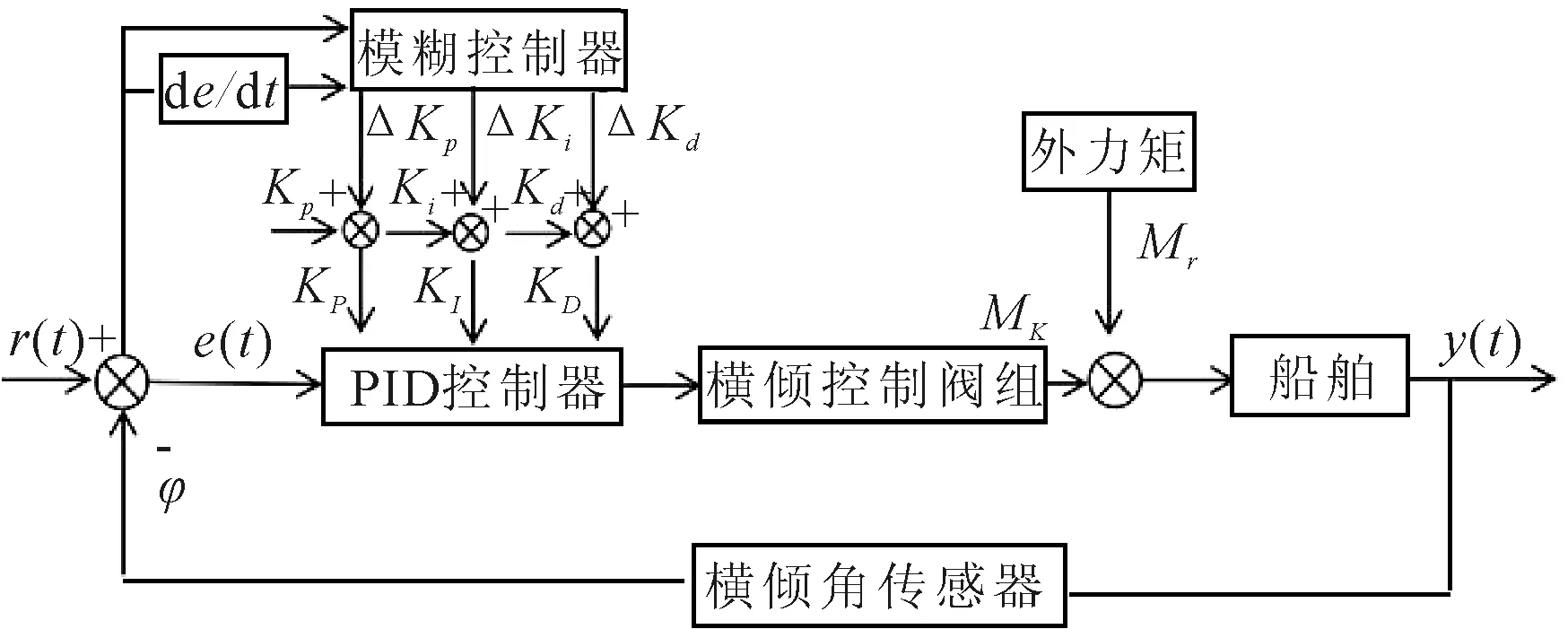
图5 模糊PID控制器应用原理示意
(6)
式中:ΔKp、ΔKi、ΔKd为模糊控制器输出量;Kp、Ki、Kd为PID控制器初始参数;K1、K2、K3为比例因子。
3.1 模糊子集和隶属度函数的确定
设定以船舶的正浮状态零倾角为给定值,则偏差e为船舶实际倾角。e、ec、ΔKp、ΔKi、ΔKd的模糊集均为{NB,NM,NS,ZO,PS,PM,PB},对应模糊集论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},隶属度函数形状均采用三角形,变量隶属度函数见图6。

图6 变量隶属度函数
3.2 建立模糊控制规则
通过总结实践经验和专家的理论知识,建立泵控式抗横倾系统中模糊PID控制器ΔKp、ΔKi、ΔKd的参数调整规则。当偏差e较大时,为了加快系统响应减少超调量,ΔKp值应较大,ΔKi、ΔKd应较小。当偏差e和偏差变化率ec大小适中时,为了尽快使系统趋于稳态,ΔKp值取小,ΔKi、ΔKd的值大小适中。当偏差e较小时,为了保证系统的稳态特性,ΔKp、ΔKi的值取大,同时为了增加系统抗干扰能力,当ec较小时,ΔKd取大,当ec较大时,ΔKd取小。
3.3 模糊PID控制器的参数确定
船舶在港作业时横倾角允许范围为[-0.5°,0.5°],危险范围为[-10°,10°],故偏差e变化范围为[-10,10°],偏差变化率ec的范围为[-0.2°,0.2°],可以计算得到量化因子Ke=0.6、Kec=30。比例因子K1、K2、K3的取值将会直接影响系统的响应,下面通过系统的仿真实验具体来探究比例因子K1、K2、K3的取值。可以通过预先固定其中两个参数,逐渐增大另一个参数来探究比例因子对系统响应的影响,最终找到比例因子最佳的取值,见图7。
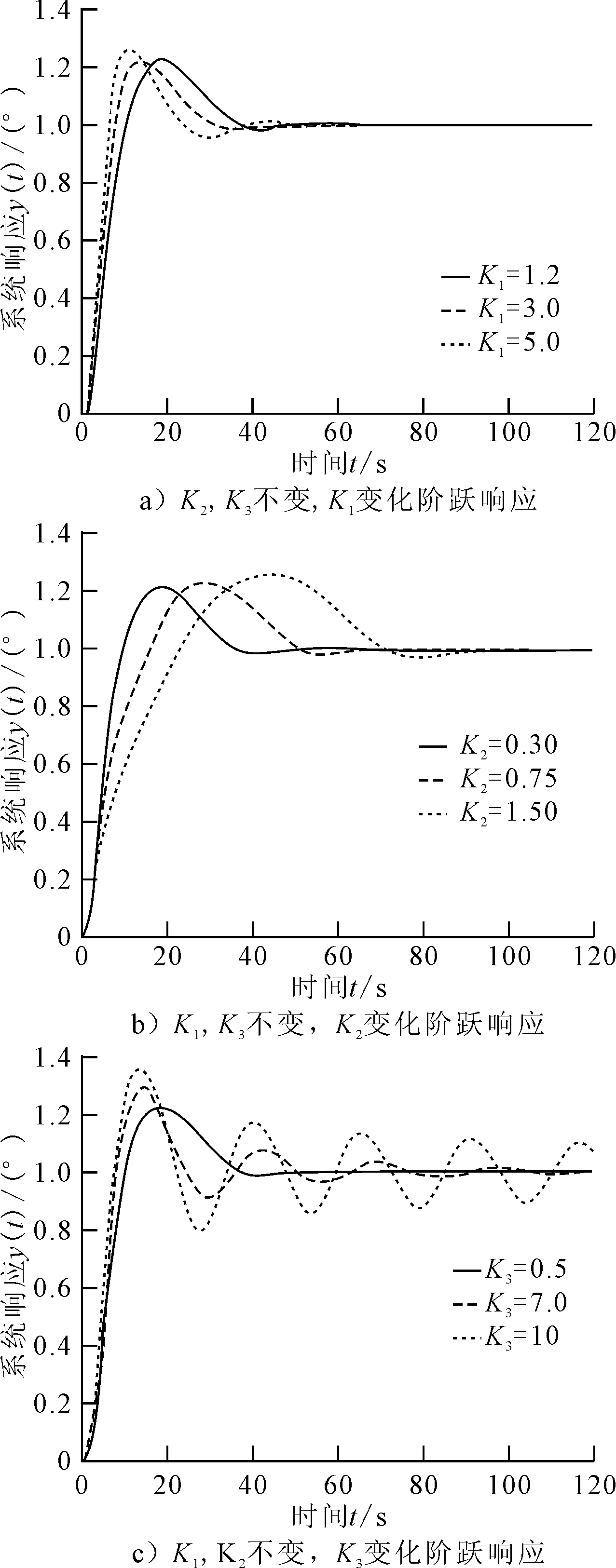
图7 比例因子取值对系统响应的影响
可以看出比例因子的取值将直接影响系统的响应,经大量仿真实验得出当K1=1.2,K=0.3,K3=0.5时系统响应为最佳状态。
4 仿真结果分析
为了验证该方法的有效性,在simulink环境中设置变步长ode45算法,仿真时间为200 s,分别用PID控制器和模糊PID控制器对表1中集装箱船的泵控式抗横倾系统模型进行仿真,如图8所示,其中设置PID控制器的参数为:Kp=6.7,Ki=0.38,Kd=22.5;模糊PID控制器参数为:Ke=0.6,Kec=30,K1=1.2,K2=0.3,K3=0.5。图9所示为分别运用PID控制和模糊PID控制方法得到的船舶单位阶跃响应,图10和图11给出了船舶在不同倾角恢复到平衡时,分别采用PID控制和模糊PID控制得到的仿真结果。

图8 PID控制和模糊PID控制的系统仿真模型
从图9可以看出,当给定系统一个单位阶跃信号,采用PID控制时,经过20 s系统输出达到峰值为1.5,经过100 s的调节时间,系统达到稳态平衡,计算得出系统最大超调量σP%=50%,上升时间tr=9 s,调整时间ts=100 s,稳态误差ess=0。而采用模糊PID控制时,经过20 s系统输出达到峰值为1.2,40 s时系统达到稳态,计算得到系统最大超调量σP%=20%,上升时间tr=9 s,调整时间ts=40 s,稳态误差ess=0。从图10和图11可知,当船舶受到外载荷的作用产生1°和2.5°的横倾角,在泵控式抗横倾系统作用下,采用PID控制,船舶恢复到平衡需要150 s,而采用模糊PID控制船舶恢复到平衡只有60 s。

图9 两种控制策略下船舶单位阶跃响应

图10 船舶从1°到恢复0°的响应比较

图11 船舶从2.5°到恢复0°的响应比较
5 泵控式抗横倾系统试验平台和抗横倾试验
根据实际船舶压载舱的大小按比例缩小设计出的泵控式抗横倾系统试验台实物图如图12所示。根据前文分析,真实模拟实际船舶装卸载货物及调平过程,经PLC控制对系统进行抗横倾测试。

图12 泵控式抗横倾系统试验台
实验开始时在右横舱中加入适量的外载荷,使系统产生一个右倾角,此时四角液位传感器的测量值见图13,当横倾角大于设定的安全倾角时,控制系统开始进行压载水的调节使系统达到平衡,泵控式抗横倾系统横倾角见图14。

图13 四角液位传感器的测量值

图14 泵控式抗横倾系统横倾角
图13中,液位传感器1和液位传感器2安装在右横舱一侧,液位传感器3和液位传感器4安装在左横舱一侧。没加入外载荷时,系统处于平衡状态四角吃水深度为155 mm,当突加外载荷时,系统产生右倾,四角液位传感器产生液位差,经过50 s压载水的调节系统达到平衡,此时四角吃水深度为160 mm。观察发现在调节平衡过程中同一侧的液位传感器也产生不同程度的液位差,这是由于在调节液位时出现了横纵倾耦合的状况。
从图14可见,0~6 s为突加外载荷,此时系统产生的右倾角,加入的外载荷和横倾角成线性相关,验证了船舶横倾运动模型的正确性。经过50 s的调节,系统在达到平衡,满足船舶在港就业时允许的横倾角,故通过抗横倾试验验证了泵控式抗横倾系统的可行性和实用性。
6 结论
1)相比于传统PID控制,采用模糊PID控制系统最大超调量减少30%,船舶恢复平衡时间减少了90 s,证明了本文方法在船舶横倾调节过程中具有良好的效果,为实现模糊PID控制在船舶泵控式抗横倾系统中的应用提供了理论依据。
2)本次设计的船舶泵控式抗横倾系统能够模拟出真实船舶装卸载货物的工作状态。通过试验平台进行抗横倾试验,可知系统能在50 s内将由外载荷产生的横倾,调节到平衡状态,证明了该系统的实用性,同时对于模拟船舶的平衡和未来船舶平衡系统的开发具有实际的科研和应用价值。
猜你喜欢
时代汽车(2022年14期)2022-07-06
航天器环境工程(2021年6期)2022-01-07
新视线·建筑与电力(2021年2期)2021-09-10
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
科技视界(2020年17期)2020-07-30
汽车实用技术(2018年17期)2018-10-21
山东青年(2016年12期)2017-03-02
速读·中旬(2015年10期)2015-10-21
科技与创新(2015年2期)2015-02-11