
新时代美丽乡村建设三维激光扫描技术应用研究*
2021-08-15 03:02周美川张宝鹏赵玉霞
甘肃科技 2021年12期
周美川,张宝鹏,赵玉霞
(甘肃建筑职业技术学院,甘肃 兰州 730050)
随着信息技术的高速发展,三维激光扫描技术近几年来得到飞速发展,三维激光扫描技术具高效、快速、非接触、数据全面等优点,有效的提高了测绘数据采集和应用。
基础测绘数据直接关系到美丽乡村建设的科学性以及合理性,为乡村规划和建设提供重要依据和数据资料。美丽乡村建设,基础测绘先行,传统的测绘技术,数据不够全面、耗时耗力,同时很难满足美丽乡村建设对基础测绘数据的需求;通过三维激光扫描技术建立乡村数字化点云模型,提供立体化、高精度地理信息数据助力乡村规划、乡村基础建设、土地确权地籍测量、危险房屋鉴定等方面;三维激光扫描技术高效、全面的乡村地理数据采集为实现美丽乡村建设的有力保障。
1 三维激光技术的原理和分类
1.1 三维激光扫描仪的工作原理
三维激光扫描仪的工作原理(如图1 所示)为由激光生成器首先向外发射一个激光信号,再由均匀旋转的反射镜反射至目标物体表面,信号经目标物体表面反射后返回,并由接收器接收,微处理器通过激光的脉冲时间差或相位时间差计算出目标测点与扫描仪的距离s,同时根据扫描仪反射镜的竖直角角度α 和扫描仪水平旋转角度β,计算得到激光扫描目标点P 的三维位置坐标(X,Y,Z)的计算公式(1)。
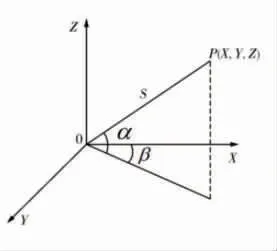
图1 扫描原理图

1.2 三维激光扫描仪分类
1.2.1 按测距原理分类
三维激光扫描仪按测距原理一般可分为:基于脉冲、基于相位差和结构光测量三种。
脉冲式测距原理是依据脉冲信号时间差计算激光飞行距离,由于发射脉冲的时间短、功率大,所以发射密度小测程远;相位式扫描仪是发射连续的激光波,通过计算从目标物体漫反射返回的激光波的相位差计算激光飞行时间,从而得到仪器中心与扫描物体的距离;相位式扫描仪的特点是精度高,测距精度能达1mm 左右,扫描速率高,每秒能达到200 万点,但测程较小,扫描距离一般在30~400m。结构光测距原理是依据相机、结构光和目标之间的关系,利用三角测量原理,计算得到目标位置信息,其特点是扫描精度高,能小于0.01mm 左右的精度。但其扫描范围一般较小,仅有几十厘米至几百厘米,适合于工业零件等相对较小的物体。目前,市场上也出现了脉冲相位混合式三维激光扫描仪,兼具脉冲式和相位式测距的优点。几种测距原理技术对比见表1。
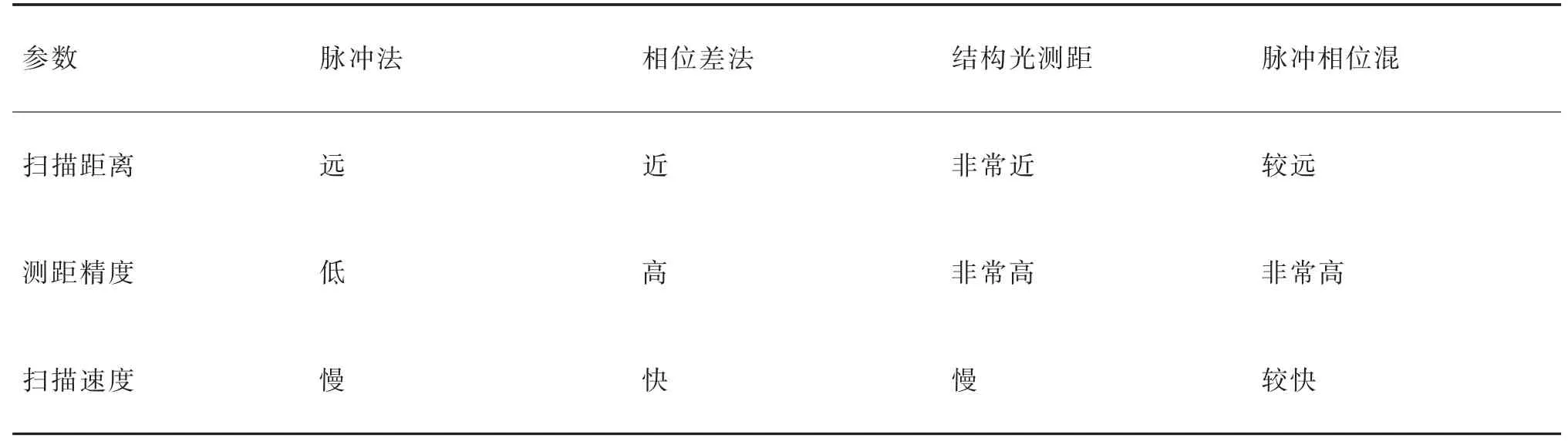
表1 几种测距原理技术的对比
1.2.2 按照扫描平台分类
三维激光扫描仪依据搭载平台的不同,可以分为:星载激光扫描系统、机载激光扫描系统、车载三维激光扫描系统、地面激光扫描仪和便携式激光扫描仪。
星载三维激光扫描系统,最长扫描距离通常达几百公里以上,可用于云高、大气气溶胶测量、冰盖检测、森林生物量估算、陆地高程测量;机载激光扫描系统,又称机载激光雷达,是一种在有人或无人机平台上搭载三维激光扫描仪实现地面三维坐标和影像数据获取,具有作业范围大、效率高和智能化等优点。车载三维激光扫描系统,是利用汽车为搭载平台,将三维激光扫描仪、相机、GNSS 定位模块、高精度惯性导航装置和高性能工作站集成后通过云台安置在汽车上,在汽车行驶过程中,高效获取位置信息和色彩信息;地面激光扫描仪,是指在地面安置三脚架,在脚架上放置三维激光扫描仪,通过马达驱动自动水平旋转,镜像竖直旋转扫描目标物体,通过处理系统计算得到三维坐标、反射强度、照片等信息的非接触式主动测量技术。地面三维激光扫描仪适用在工程测绘与三维建模、工程检测、工程监理、古建筑测量、文物测量等领域的空间地理信息数据釆集;便携式三维激光扫描仪,是一种可以用手持扫描或背包式扫描来获取目标物体表面三维数据的便携式三维扫描仪,便携式三维激光扫描仪的测程一般较小,测程一般为几十厘米到几百米,便携式三维激光扫描仪的精度取决于它的测距原理,其优点是体积小、重量轻、易于携带、操作简单易用、精度较高。
2 三维激光扫描仪在乡村建设进行数据采集的方案
2.1 合理选用三维激光扫描仪
根据测区的大小和测绘的需求合理选用仪器的类型,若测区较大可选用基于飞机平台的机载三维激光扫描仪,若测区较小可选用地面式三维激光扫描仪。同时也可采用空地搭配,机载三维激光扫描仪和地面式三维激光扫描仪配合使用,以提高工作效率。对于危险边坡监测、古建筑、碑刻等宜选用相位式三维激光扫描仪,以提高测量精度。
2.2 三维激光扫描仪作业方法
测区范围较大时,宜采用机载三维激光扫描仪,以提高工作效率。外业流程为:首先进行控制测量,一般在村中的各村小组踏勘选取控制点,采用RTK 控制测量测出坐标信息;然后在控制点上安置基准站;最后,在机载三维激光扫描仪地面站上规划好航线、设置扫描参数、飞行扫描、外业数据检查、下载数据。内业工作流程为:数据解算、点云拼接、点云去燥和点云抽稀、质量检查。
测区范围较小时,宜采用地面式三维激光扫描仪。外业流程为:首先进行控制测量或布设标靶;然后安置地面式三维激光扫描仪;最后,设置扫描参数、开始扫描、外业数据检查、下载数据。内业工作流程为:点云拼接、点云去燥、转换坐标系、点云抽稀、质量检查和彩色点云制作。
3 三维激光扫描仪在美丽乡村建设中的典型应用
通过三维激光扫描技术建立乡村数字化点云模型,提供立体化、高精度地理信息数据助力乡村规划、乡村基础建设、土地确权地籍测量、农村危险房屋鉴定等方面;
3.1 乡村规划和乡村基础建设
新时代我国乡村振兴战略的实施,美丽乡村建设得到飞速发展,乡村规划和乡村基础建设都需要大比例地形图作为支撑,然而农村大比例尺地形图具有测区测绘资料少、资料现势性差、测区地物和地貌复杂、测绘难度和工作量较大,同时美丽乡村规划和基础建设对测绘精度有较高的要求见表2。

表2 乡村规划测量精度要求
传统测绘使用全站仪或RTK(实时动态测量)等测绘仪器,都是单点测量方法,需要逐点测量,同时由于通视条件限制和卫星信号遮挡,测绘盲区较多,测绘效率低。三维激光扫描仪又称实景复制技术,采用的面扫描的方式,不但精度高而且数据全面、作业效率高。通过机载或地面式三维激光扫描制作乡村数字化点云模型,在点云模型上可通过Autodesk ReCap 导入CAD 可快速识别地物类型并勾画出地物平面图,同时点云模型抽稀后导入CASS 可快速导出地貌平面图,地物平面图和地貌平面图叠加后得到地形图,能满足乡村规划和乡村基础测绘数据的需求。
3.2 土地确权地籍测量
新时代国家乡村振兴战略的实施,对地籍测量有了更高的要求,既要快速,又要高质量。三维激光扫描技术相对传统测量方法速度快、精度高。可充分利用机载、车载、背包式和地面式三维激光扫描仪高效获取农村复杂环境条件下高密度、高精度的点云数据。经过点云拼接、坐标系转换、降噪和抽稀后导入测图平台采集地物和地貌信息,判断界址点和边界的位置。经选取围墙界址点、房屋界址点试验验证,三维激光扫描技术采集的界址点精度满足地籍测量的要求,界址点点位中误差小于等于5 cm,限差小于等于10cm。
3.3 农村危险房屋鉴定
美丽乡村建设过程中,农村危房改造提升了人居环境,让人们住好、住安全的同时,乡村环境、风貌得到了显著改善。农村危险房屋鉴定是农村危房改造的前提。房屋地基的沉降测量、基础裂缝测量、结构构件的变形和裂缝测量是农村危险房屋鉴定重要依据。选用基于相位式测量原理的地面式三维激光扫描仪多期扫描建筑物后能得到房屋内外完整、精准的点云数据,多期点云数据通过Autodesk ReCap 导入CAD 或直接利用BuildIT Construction软件标注出基础沉降量、构件变形量和构件裂缝宽度。传统测量基础观测沉降、变形和裂缝费时费力,工作量大、效率低、成本高;三维激光扫描技术用于农村危险房屋鉴定省时省力,测量成果客观、真实、可靠。
4 结语
当前,三维激光扫描技术在美丽乡村建设中使用的案例还较少。通过介绍三维激光扫描技术在乡村规划、乡村基础建设、土地确权地籍测量、农村危险房屋鉴定典型应用场景,分析了三维激光扫描技仪的选型、技术路径;同时三维激光扫描技术应用也不是完美的,由于点云数据量巨大,数据处理和应用是亟待解决的难点,同时数据自动化提取也是需进一步解决的难点。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
中国铁道科学(2019年5期)2019-10-19
上海建材(2019年2期)2019-07-13
模具制造(2019年3期)2019-06-06
测绘通报(2018年10期)2018-11-02
智能城市(2018年8期)2018-07-06
中华建设(2017年3期)2017-06-08
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
