
基于无人机载光电平台的目标定位技术
2021-08-14 19:52钟麟张岐坦
计算机与网络 2021年13期
钟麟 张岐坦


摘要:针对无人机目标定位问题,基于无人机载光电平台总结了无人机目标定位的典型工作流程,系统论述了无人机目标定位技术现状,阐述了包括基于视觉、地图匹配、空间前方交会和粒子滤波技术的主要目标定位方法。针对性地分析了 4 种技术的优缺点,对无人机目标定位技术的未来发展趋势进行了展望。
关键词:光电平台;目标定位;地图匹配;空间前方交会;粒子滤波
中图分类号:TN957 文献标志码:A 文章编号:1008-1739(2021)13-53-5
Target Localization Technology of UAV Photoelectric Platform
ZHONG Lin, ZHANG Qitan
(The 54th Research Institute of CETC, Shijiazhuang 050081, China)
Abstract:Aiming at the target localization based on the characters of UAV photoelectric platform, the target localizationtechnologies are studied and the target localization work flow is summarized. The target localization technologies are introducedsystematically. The technologies proposed here include vision-based target localization technique, map matching-based targetlocalization technique, space intersection-based target localization technique and particle filter-based target localization technique. Themerit and demerit of these techniques are also discussed. Finally, the future development of UAV target localization technology isprospected.
Keywords:photoelectric platform; target localization; map matching; space intersection; particle filter
0 引言
無人机由于其成本低、机动快、时效性高和适应性强的特点,得到了快速发展和广泛应用[1-2]。随着机载光电平台的广泛应用,利用机载光电平台进行目标侦察跟踪定位,获取目标位置及目标运动信息得到了各行业极大的关注。目前,利用无人机目标定位技术,在军事领域可以执行激光制导、电子干扰、通信中继及战斗评估等任务,还可进行精确打击、定点轰炸,甚至还可以拦截战术导弹和巡航导弹,代替人员在核生化或其他特殊条件下执行作战任务[3-5]。在民用上也大有可为,可应用于场区监控、气象探测、公路巡视、勘探测绘、水灾监视、航空摄影、交通管理、电力线路巡查及森林防火救灾等[6-7]。以无人机光电侦察平台目标定位为研究背景,从实际工程应用的角度出发,总结了基于无人机载光电平台的目标定位典型工作流程,梳理了无人机目标定位技术现状,针对性地分析了各种技术的优缺点,最后对无人机目标定位技术的未来发展趋势进行了展望。
1 无人机目标定位流程
机载光电平台是无人机最基本的任务执行单元,通过光电系统及其内在的光电传感器可以对各种地面目标、空中目标进行侦察定位。随着光电技术和数字技术的发展,在机载平台小型化和集约化的潮流下,无人机机载光电系统的性能将有大的提高,探测距离将大幅度增加,灵敏度和分辨率更高,质量和体积更小,为无人机目标高精度定位的实现奠定了硬件基础[8-13]。无人机载光电平台作为一种优秀的空中侦察、探测系统,其战场侦察和目标监视的能力是实现侦察和打击一体化的关键。
通过机载侦察设备,通常可以得到飞行姿态(俯仰角、倾斜角、偏航角)、成像平台方位角、高低角以及传感器焦距等信息,但是无法直观得出目标的具体位置信息。为了得到目标在大地坐标系下的三维坐标,需要得到目标图像所在时刻的飞行姿态测量数据、无人机 GPS 位置信息、机载光电平台自身的视轴位置、机载光电平台的激光测距值等信息参数,然后通过一系列的坐标转换计算出目标的三维位置。基于无人机载光电平台的目标定位工作流程如图 1 所示。
基于无人机载光电平台的目标定位工作流程中主要分为2 个关键部分:①通过导航定位系统获取载机位置姿态信息,通过无人机载光电平台获取目标相对距离、目标角度(方位角、俯仰角)等参数信息;②通过无人机目标定位算法结合前面获取的参数信息在一系列坐标系统转换下得出目标的定位结果。目标定位能力作为一个系统指标,受传感器、测距仪、载荷平台稳定精度、飞行平台稳定精度和位置精度等综合因素影响,因此目标定位难度较大,目前已经发展出多种无人机目标定位技术。
2 无人机目标定位技术
2.1 基于视觉的目标定位技术
基于视觉的目标定位技术属于主动定位方法,通过控制稳定平台和摄像系统搜索侦察目标。当目标出现在画面上时,锁定并跟踪目标,使其位于画面中心,同时得到目标图像所在时刻的飞行姿态测量数据、无人机 GPS 位置信息、机载光电平台自身的视轴位置及机载光电平台的激光测距值等信息参数。基于目标与图像像素坐标之间的坐标变换关系,经过一系列变换矩阵,最终得到目标的估计位置。其中关系到几个坐标系的定义和转换,包括惯性坐标系、无人机当地坐标系、机体坐标系、平台坐标系和相机坐标系[14-15]。各坐标系定义如图 2所示。
惯性坐标系用![]() 表示,是一个固定的坐标系,
表示,是一个固定的坐标系,![]() 指向北,
指向北,![]() 指向東,
指向東,![]() 指向地球中心。无人机当地坐标系用
指向地球中心。无人机当地坐标系用![]()
![]() 表示,各轴方向与惯性坐标系相同,原点在无人机质心。机体坐标系用
表示,各轴方向与惯性坐标系相同,原点在无人机质心。机体坐标系用![]() 表示原点在无人机质心,
表示原点在无人机质心,![]() 指向机头,
指向机头,![]() 指向由右机翼,
指向由右机翼,![]() 指向机体腹部。摄像平台坐标系用
指向机体腹部。摄像平台坐标系用![]()
![]() 表示原点在平台中心点,
表示原点在平台中心点,![]() 与光轴同向,
与光轴同向,![]() 指向成像面右侧,
指向成像面右侧,![]() 指向成像面下侧。摄像机坐标系用
指向成像面下侧。摄像机坐标系用![]() 表示,原点在光心,
表示,原点在光心,![]() 指向成像面上方,
指向成像面上方,![]() 指向成像面右侧,
指向成像面右侧,![]() 指向光轴。
指向光轴。
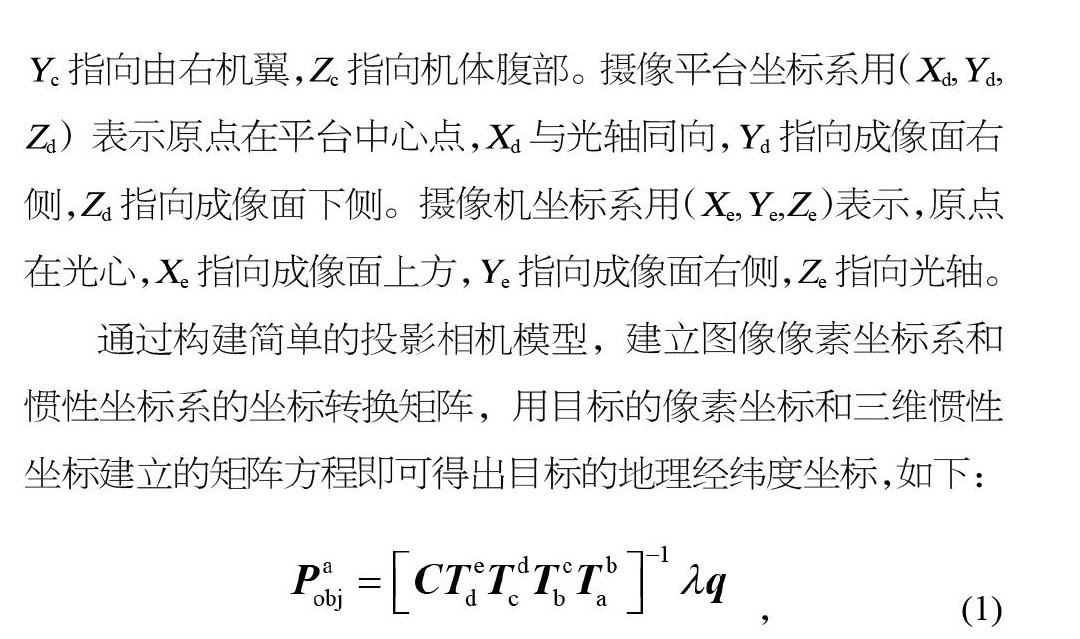
通过构建简单的投影相机模型,建立图像像素坐标系和惯性坐标系的坐标转换矩阵,用目标的像素坐标和三维惯性坐标建立的矩阵方程即可得出目标的地理经纬度坐标,如下:
![]() (1)
(1)
式中,![]() 表示目标在惯性坐标系下的三维坐标位置;C表示相机校准矩阵;
表示目标在惯性坐标系下的三维坐标位置;C表示相机校准矩阵;![]() 表示从坐标系i到坐标系j的齐次变换矩阵;
表示从坐标系i到坐标系j的齐次变换矩阵;![]() 表示无人机到目标的激光测距值;q表示目标在图像上的像素坐标。
表示无人机到目标的激光测距值;q表示目标在图像上的像素坐标。
基于视觉的目标定位技术利用平台惯导确定姿态参数,通过综合光电平台自身相对于无人机旋转参数和激光测距,建立空间几何关系,换算获得侦察目标的位置。该方法的主要优点是物理实现简单、经济可行、技术难度低,能够实时快速定位,应用广泛;主要缺点是容易受到无人机自身位置误差、飞行姿态数据误差、光轴指向误差影响,定位精度不高。
2.2 基于地图匹配的目标定位技术
基于地图匹配的目标定位基本原理是在执行任务过程中通过预装飞行路线附近的地理编码底图,当无人机飞抵目标区上空时,由光电载荷将含有目标的侦察图像传输到地面站,由操作员通过观察比较后,将含有目标的相应区域图像放大、冻结,并利用无人机位置信息、无线电高度表和无人机飞行姿态数据,确定目标的近似位置和含有目标的局部实时图像。然后根据目标的近似位置,找出相应目标区域的数字地图(数字正射影像图),该数字地图就作为参考图像,通过局部实时图像和参考图像的相关分析计算(或操纵员观察比较判定),确定出目标在参考图像上的对应位置,从而实现对目标的定位[16]。为了实现对探测目标的精确定位,需要把无人机图像与具有地理信息的参考图像进行精确匹配。因此鲁棒性强实时性好的图像匹配算法成为其中的关键。
由于无人机侦察图像与参考图像不可避免地存在尺度变化、旋转变化和光照变化,图像匹配需要把不同传感器或者同一传感器在不同时间、不同成像条件下对同一景物获取的 2 幅或多幅图像在空间上进行对准,以确定 2 幅图像之间的平移以及旋转关系。目前国内外有关专家学者提出了许多图像匹配算法,如基于模板的方法、FFT 相关匹配方法、相位相关算法、序贯相似检测算法等,这些匹配算法在某种程度上能够实现图像之间的配准。但是如果 2 幅图像之间存在平移旋转、仿射变换时,算法适应性较差。近年来局部不变特征对图像旋转缩放等变化具有较好的处理能力,已经成为研究的热点。文献[17]提出了一种基于改进 SIFT 的图像匹配方法,该方法在特征点匹配时采用简单的准欧式距离代替传统的欧式距离作为相似度量准则,并按照高斯差分空间结构由粗至精进行匹配。该方法主要包括建立尺度空间、极值点检测、特征点位置精确定位、确定特征点方向和生成 SIFT 特征描述符 5 个步骤。相关实验表明,该方法可以实现图像之间的正确匹配,有利于无人机对探测目标的精确定位,并且具有较好的实时性。
該方法的定位误差来源主要包括数字地图 / 高程图的量化误差、操作手目标点测量误差和相关分析匹配校正误差 3 个方面。在实际飞行中,大部分情况下无法获取目标所在区域的数字地图,同时定位精度受底图影响较大,致使该技术应用范围受限。
2.3 基于空间前方交会的目标定位技术
空间前方交会一般是使用立体像对上的同名像点,得到2 条同名射线在空间的方向,这 2 条射线在空间一定相交,其相交处必然是该目标点的空间位置[18]。
在无人机目标定位过程中,可以采用目标一侧远距离选取2 个点并采取直线轨迹快速飞行的方式,同时在飞行过程中2 次对目标进行相关测量,构建空间三角形并最终确定目标位置。该方法有效避免了无人机过顶定位的局限,在保证定位精度的前提下大大提高了无人机战场生存能力。
如图 3 所示,在空中![]() 和
和![]() 两个点对目标点A进行摄影。建立地面摄影测量坐标系
两个点对目标点A进行摄影。建立地面摄影测量坐标系![]() ,其中
,其中![]() 轴与航向基本一致,且
轴与航向基本一致,且![]() 面水平。过
面水平。过![]() 做像空间坐标系
做像空间坐标系![]() ,其轴分别与
,其轴分别与![]() 平行;同样过
平行;同样过![]() 做像空间坐标系
做像空间坐标系![]() ,其轴也分别与
,其轴也分别与![]() 平行。
平行。
设![]() 在
在![]() 中的坐标为
中的坐标为![]()
![]() ,目标点A在
,目标点A在![]() 中的坐标为
中的坐标为![]() ,相应的像点
,相应的像点![]() 的像空间坐标为
的像空间坐标为![]() ,像空间辅助坐标为
,像空间辅助坐标为![]() ,则有:
,则有:
 (2)
(2)
式中,![]() 表示由已知的外方位角元素計算的左右像片旋转矩阵。因左右像空间辅助坐标系及
表示由已知的外方位角元素計算的左右像片旋转矩阵。因左右像空间辅助坐标系及![]() 相互平行,且光电载荷、像点和目标点 3 点共线,则由图 3 可得出:
相互平行,且光电载荷、像点和目标点 3 点共线,则由图 3 可得出:
 ,(3)
,(3)
因此可得出目标点坐标的公式为:
 。(4)
。(4)
该方法的定位误差来源主要包括飞机位置测量精度、激光测距设备测量精度、飞机姿态参数测量精度和转台测角精度。2 次测量位置间距对定位误差也有一定影响,位置间距不能过小。通过多次成像结果,结合最小二乘法可以改进定位结果。
2.4 基于粒子滤波的目标定位技术
作为一种系统状态估计的理论和方法,卡尔曼滤波(Kalman Filtering)理论是由卡尔曼于 1960 年提出的现代滤波理论。卡尔曼滤波理论作为一种重要的最优估计理论被广泛应用于各种动态数据处理中,尤其是 GPS 动态数据处理、惯性导航等。近 10 年来,卡尔曼滤波理论在 GPS 动态定位数据处理以及 INS/GPS 组合系统导航计算等领域得到了深入研究和广泛应用[19]。
虽然卡尔曼滤波在目标追踪定位中已经得到应用,然而卡尔曼滤波需要系统精确的数学模型,并假设系统为线性的,噪声信号也必须是噪声统计特性已知的高斯噪声。在实时定位过程中,描述系统的动态变化过程的状态方程是一个定常速模型,对于高动态情况,将会产生较大的噪声误差,致使状态变量的一步预测不够准确。而光轴指向角的观测模型是非线性的,经过线性化后得到的量测矩阵仅取至泰勒级数展开的 1 次项,略去 2 次及其以上的高阶项,显然存在线性化误差。
20 世纪 90 年代,Gordon 等学者提出了基于序贯蒙特卡罗的粒子滤波算法,通过一组在状态空间中传播的随机样本近似的表示概率密度函数,这些随机样本被称为粒子,其系统状态的后验概率密度由带有权重的粒子表征。粒子滤波适用于任何能用状态空间模型描述的非线性系统,精度可以逼近最优估计。由于其可以较好地处理非线性和非高斯系统,粒子滤波在各行各业得到了广泛研究。
在目标定位中,针对较高阶次的非线性模型,粒子滤波可以利用系统模型的信息,将目标状态的不确定性近似为传感器的不确定性。粒子滤波将传感器探测数据作为目标位置的初始值,根据载荷和目标模型的先验知识估计目标位置。光电载荷的观测模型是目标定位的基础,分为投影模型和坐标转换模型两部分。2 个模型联立将传统坐标系的目标点转换为载荷坐标中的点。目标模型的构建是根据目标的位置状态作为目标位置的近似估计[20]。状态空间构建函数如下:
![]() ,(5)
,(5)
式中,f(·)为传递函数,随时间传播状态;z(t)为测量函数;v(t),w(t)分别为过程和观测噪声分布。当权重函数![]() 确定后,时间k时目标的状态估计如下:
确定后,时间k时目标的状态估计如下:
![]() 。(6)
。(6)
影响该方法的主要因素是目标初始估计位置和模型的准确性。在建立合理的模型基础上,合理的目标初始估计位置可以使算法快速收敛到真实目标位置;如果初始目标值偏差太大,则收敛过程缓慢,甚至无法收敛到准确目标位置。将重采样的方法加入 SIS 算法中,可以有效避免收敛性能快速下降,主要流程为粒子集的初始化、重要性采样、重采样和输出等。
3 地面目标定位模拟试验
在 Matlab 仿真实验中,用无人机采用环绕一个目标飞行方式对地面的一个已知固定目标进行测量定位,机载目标锁定设备将该目标锁定在图像中心,无人机的飞行高度为 600 m,飞行半径为 500 m,采集数据点为 100 个。初始方位角为90° ,高低角为 50° ,滚转角、俯仰角和偏航角均为零。试验结果如表 1 所示。
設无人机的飞行高度为 1 000 m,飞行半径为 500 m,采集数据点为 100 个。初始方位角为 90° ,高低角为 50° ,滚转角、俯仰角、偏航角均为零。试验结果如表 2 所示。
从表 1 和表 2 可知,基于粒子滤波的目标定位技术优于基于视觉、地图匹配和空间前方交会等传统技术的目标定位方法。虽然粒子滤波目标定位技术精度较高,但是受定位模型和目标初始值影响较大,不如视觉目标定位、地图匹配定位和空间前方交会目标定位技术简单易用、稳定性好。
4 发展前景
目标定位作为无人机侦察任务的首要目标,是无人机发展过程要解决的关键问题。随着电子信息技术和计算机技术的发展,各种平台传感器的探测手段、功能性能和工作模式都不断增强,传感器精度越来越高。随着传感器精度的提高,其分辨率也在不断提升,各种角度测量准确度大大提高,目标定位误差也会不断减小。多传感器的信息融合,随着机载 SAR技术日渐成熟,未来光学 /SAR 将可以在同一平台同时工作,单传感器多平台分布式协同探测模式可发展为多传感器单平台协同探测模式,多传感器信息融合促进目标定位能力不断提高。随着各种优化统计方法的不断研究,对目标定位模型的改进完善和优化求解也会带来极大的促进。
5 结束语
近年来,随着全球定位系统、惯性导航系统及计算机技术的发展和进步,新一代的机载光电平台向着多功能、智能化、基础化及轻量化方向发展。基于光电平台的目标定位技术得到了广泛关注,研究成果不断涌现,应结合新技术发展趋势进一步改进完善目标定位方法。
参考文献
[1] 肖春晖.无人机在战场侦察上的应用[J].无线电工程,2008,38(5):50-52.
[2] 陆博迪,孟迪文,陆鸣,等.无人机在重大自然灾害中的应用与探讨[J].灾害学,2011,26(4):122-126.
[3] 樊邦奎,段连飞,赵炳爱,等.无人机侦察目标定位技术[M].北京:国防工业出版社, 2014.
[4] 张楠,王潇,王军力.无人机在陆军精确打击体系中的应用研究[J].兵工学报,2010,31(12):107-111.
[5] 向武略,程远国,李仙茂.舰载无人机雷达、通信侦察载荷在海战场打击效果评估中的运用[J].国防科技,2014,35(5):36-40.
[6] 王凤娟.基于图像跟踪的无人机定位方法研究[D].西安:西安电子科技大学,2009.
[7] 刘烜,胡倩影.航空光电平台机动目标跟踪定位技术应用[J].无线电通信技术,2014,40(3):82-85.
[8] 王春龙,马传焱,时荔蕙,等.一种基于多点观测的无人机目标定位方法[J].无线电工程,2016,46(2):48-51.
[9] 孙超,都基焱,段连飞.一种空间两点交会无人机定位方法[J].兵工自动化,2011,30(6):35-36.
[10] 姚新.无人机提高目标定位精度方法研究[J].舰船电子工程,2011,31(10):56-59.
[11] 余家祥,萧德云,姜鲁东.基于多帧图像同名点的无人机对地定位新方法[J].兵工学报,2008,29(3):300-304.
[12] 陈新,彭科举,周东翔,等.基于优选数据准则的空基多平台协同定位方法[J].信号处理,2010,26(10):1466-1472.
[13] 柏青青,许建新,邵慧等.无人机动态目标高精度定位方法研究[J].航空计算技术,2014,44(1):73-77.
[14] BARBER D B, REDDING J D, MCLAIN T W, et al.Vision-based Target Geo-location Using a Fixed-wingMiniature AirVehicle [J]. Journal of Intelligent and RoboticSystems,2006,47(4): 361-382.
[15] 孙辉.机载光电平台目标定位与误差分析[J].中国光学,2013,6(6):912-918.
[16] 谢利理,李玉忍.用数字地图提高无人机目标定位精度的新方法[J].西北工业大学学报,1998,16(1):61-64.
[17] 胡海洋,李海林.基于图像匹配的无人机目标定位方法[J].舰船电子工程,2012,32(12):49-51,79.
[18] 王树根.摄影测量原理与应用[M].武汉:武汉大学出版社,2009.
[19] 宋迎春.动态定位中的卡尔曼滤波研究[D].长沙:中南大学,2006.
[20] SCONYERS C J.Particle Filter-based Architecture for VideoTarget Tracking and Geo-location Using Multiple Uavs[D].Atlanta:Georgia Institute of Technology,2013.
猜你喜欢
语数外学习·高中版中旬(2021年11期)2021-02-14
初中生世界·九年级(2018年12期)2018-12-22
考试周刊(2018年15期)2018-01-21
杂文选刊(2018年1期)2018-01-09
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·高二版(2016年5期)2016-05-14
读者(2015年9期)2015-05-04
初中生世界·八年级(2014年2期)2014-03-15
意林(2011年10期)2011-05-14
