
基于Matlab的自动泊车系统
2021-08-13 04:26董燕丽
农业技术与装备 2021年6期
董燕丽,贾 正
(晋中信息学院 智能工程学院,山西 太谷 030800)
1 自动泊车系统
1.1 自动泊车系统组成
自动泊车系统是由环境感知模块、泊车控制器、人机交互模块三大模块组成。环境感知模块主要采集车辆周边信息,通过测距雷达和视觉传感器获得环境信息和车位信息,选定与车辆匹配的停车位。泊车控制器主要负责根据测得的环境信息规划泊车路径,利用轨迹跟踪算法测算车辆的转角,控制方向盘、车速和刹车系统来完成自动泊车,当车辆的泊车路径与规划路径有偏差时,泊车控制器要完成校正。人机交互模块主要提供显示画面和语音,驾驶员通过交互模块提供的显示和实时语音提示了解泊车情况和车辆周边信息,以便出现紧急状况时驾驶员及时介入处理,确保行车安全。
1.2 自动泊车系统流程
自动泊车辅助系统的工作流程为系统启动后按下自动泊车键,确认仪表盘上自动泊车功能已经打开,以低于30 km/h的速度行驶,超声波传感器探测车位,直至检测到有效车位,车子会在中央的行车电脑显示屏上发出“请停车”的提示信息。接着打开转向灯,显示屏显示路径跟踪控制,此时主要通过环视摄像头观察车辆周围的情况,发现异常,立刻人工刹车;若无异常,自动泊车辅助系统会控制车子进行转向、加速和制动,直到车辆进入车位后退出泊车系统。
2 环境感知传感器
2.1 超声波雷达
超声波雷达即倒车雷达,主要由传声器、收声器、控制单元等组成。超声波雷达能准确地测出汽车与周围障碍物间的距离,当汽车与障碍物达到极限距离时,能发出急促的警告声或用显示器显示等方式提醒驾驶者注意制动,特别是汽车周围有行人出现时,会重复地发出语音警告声提醒行人注意,有的汽车此时会主动驻停。
超声波传感器是一种振动频率高于20 kHz的机械波,其显著特点是方向性好、穿透能力强、易于获得较集中的声能。车载超声波雷达一般采用40 kHz,可在复杂的环境下应用,具有防尘、防水、探测角度广等特点,非常适用于泊车场景。
2.2 视觉传感器
视觉传感器即摄像头,是与人眼最相似的获取环境信息的传感器。摄像头一般包括前视摄像头、后视摄像头、环视摄像头三大类。常见的全景环视系统,也叫360°全景影像系统,主要由安装在汽车四周的多个摄像头、图像获取部件、图像合成或处理部件、图像无缝拼接融合部件、车载显示器组成。通过多摄像头获取捕捉车辆周围状况,再经过数学算法进行画面合成和画面修正,合成一幅车身周围的全景俯视图显示在车载屏幕上,让驾驶者清楚查看到车辆周边是否存在障碍物,帮助驾驶者轻松停泊车辆。
2.3 基于多传感器测距技术的车位检测
停车位的精确探测与识别是自动泊车辅助系统的关键,常见的车位检测主要是采用雷达探测或摄像头识别。雷达探测一般选用超声波雷达探测车位,因为雷达张角限制导致探测精度不高;另一种是通过视觉传感器直接识别车辆,或通过摄像头拍摄的泊车线图像数据处理后识别停车位,这种方法容易受到外界环境因素如天气、光线的干扰。
此系统主要针对平行车位的自动泊车,采用多传感器数据融合技术进行车位识别,通过融合超声波雷达和视觉传感器的数据来识别车位,有效提高了车位探测的准确度和安全性。基于多传感器车位检测数据融合的技术具有容错性、互补性、实时性等优势,已成为自动泊车领域的热点技术。
3 自动泊车路径规划算法研究
本文采用基于多传感器数据融合的路径规划,该方法在满足车辆约束条件和环境约束条件的情况下,寻找自动泊车的安全路径。
3.1 多传感器数据融合的原理
多传感器数据融合技术是指各种类型传感器实时感知到环境信息数据,将图像、数据、文字、信号、波形等这些数据信息无缝拼接融合,再经过数学算法合成画面并实时修正画面呈现在车载屏幕上的技术。汽车通过多个传感器相互协作获取到外部环境信息后将其转化为数据发送给单片机或者PC机,如果有模拟传感器,需要把模拟信号进行A/D转换成数字信号,再通过数据预处理提取出各自的特征,最后通过融合算法把数据进行融合得出相应的结果。数据融合,就是各个传感器的特征容错、优势互补、消除干扰等,从而实现对障碍物的精确分析,做出相应的判断。
对于多传感器数据融合,一般有多传感器采集的数据、模拟数字转换器、数据预处理、特征提取、融合计算、输出结果这几个环节,流程如图2所示。
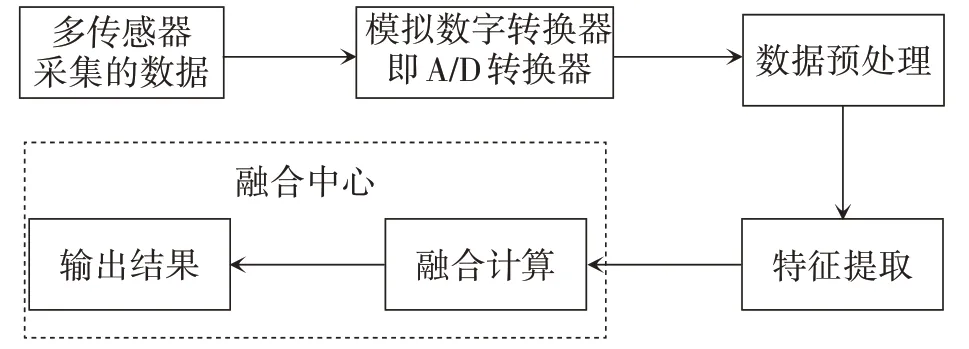
图1 多传感器数据融合的流程Fig.1 The flow chart of multi-sensor data fusion
3.2 平行泊车路径规划方法研究
通过研究车辆运动时的运动轨迹,建立车辆泊车过程的动力学模型作,为后面研究的理论基础。根据车辆信息建立车辆运动学模型,研究平行泊车路径规划。进行平行泊车路径规划时,首先需要对车辆进行约束限制,以防止车辆碰撞障碍物,而无法完成泊车。
根据车辆的初始状态和终点状态规划平行泊车的参考路径,首先方向盘向右打一定角度使车辆作转向运动,边倒车边调整方向,到达一定位置,然后方向盘向反方向打,相反方向作转向运动,转过固定角度后到达终点。
4 泊车路径的Matlab仿真
Matlab是一种主要用于数值计算及可视化图形处理的工程语言。本文利用GUI功能制作自动泊车仿真系统,该系统可以设置车辆信息和泊车条件,可对不同车辆进行泊车路径仿真。GUI泊车演示界面的制作步骤如下。①建立GUI对象。在Matlab命令窗口输入Guide指令并回车,方可进入GUI界面,新建GUI并选择保存路径,点击确定进入编辑界面。②编辑界面布局。仿真系统用到的控件包括:按钮、面板、静态文本框、可编辑文本框和坐标轴控件等,将各控件放到合适位置,并设置控件属性,填写车辆信息。③编写回调函数。仿真界面所需要的回调函数主要有“初始化”“仿真”“停止仿真”“留下轨迹”,它们包含了本文研究的自动泊车系统仿真程序的主要内容。
具体仿真过程如下:当鼠标单击“初始化”按钮时,即将参数盘、车位参数读到程序里面,启动平行泊车仿真程序,会出现一个十字交叉点,然后用鼠标随机点取一个起始点就会出现一个不留轨迹的自动泊车路线,如果发现碰撞,停止仿真,然后初始化再换个起始点仿真泊车,依次循环,直到找到一条可以完成自动泊车的路径,然后用鼠标单击“留下轨迹”即可得到自动泊车系统GUI路径仿真图。本文采取的车位宽度为3 m,长度为7.5 m,仿真的结果见图2所示。
图2 自动泊车系统GUI四段式路径仿真
Fig.2 Thefour segment path simulation of automatic parking system GUI
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
汽车工程师(2021年12期)2022-01-18
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
军民两用技术与产品(2020年3期)2020-04-07
现代家长(2018年11期)2018-01-05
科技资讯(2012年28期)2012-07-09
网络与信息(2009年6期)2009-07-31
