倾转翼无人机垂直起降段航向控制建模与分析
2021-08-07 02:03:32任峻萱何国毅刘润芃
科技创新与应用 2021年21期
任峻萱,王 琦,何国毅,刘润芃
(南昌航空大学 飞行器工程学院,江西 南昌 330063)
飞机作为目前最重要的交通运输工具之一,对人类的生产和生活起着不可替代的作用。倾转旋翼飞机是一种将固定翼飞机和直升机融为一体的新型飞行器[1],既具有直升机垂直起降和空中悬停的能力,又具有普通固定翼飞机高速巡航飞行的能力[2]。由于它具有垂直起降(Vertical Take-Off and Landing)的能力[3],故在不具备长跑道的条件下可以很好地发挥长距离、高效率运输的特点,在军用和民用急救等方面都具有很大的开发潜能[4]。例如,目前在美军服役的V-22“鱼鹰”就是一种典型的倾转旋翼飞机[5]。
倾转翼飞机与倾转旋翼飞机类似[6],由于倾转旋翼飞行器在垂直起降模式下,下洗气流被固定机翼阻挡,将产生15%~20%的升力损失[7],因此,倾转翼飞机将受气流影响最严重的部分机翼与螺旋桨动力系统一同倾转,大大提高了升力效率[8]。且对于电驱动倾转翼飞机而言,主要依靠电机转速和偏转倾转段机翼和舵面来保持其垂直起降段的姿态[9],其结构简单,研发、维护等成本有所降低,同时还具有相对较高的可靠性[10]。只要保证其垂直起降状态、过渡段状态以及平飞状态的稳定性,它就具有了实用价值。
倾转翼飞机的飞行分为平飞模式、垂直起降模式和过渡段模式三种[11],其中在垂直起降和过渡段模式下,航向和横向的控制方式耦合在一起,使飞行器处在一个时变、强耦合、非线性阶段[12]。
郑光延等[13]针对倾转翼飞机过渡段模式飞行时动力学特性呈现出的强非线性和强耦合的特点,发现传统的PID控制方法难以设计其控制参数并实现定高控制。将遗传算法和PID控制理论相结合,基于遗传算法整定获得全局最优的PID控制参数以保证良好的定高控制效果。仿真试验结果表明经遗传算法整定参数后的PID控制能够更好地实现对倾转翼飞机过渡段的定高飞行控制。杨龙飞等[14]针对倾转翼飞机过渡段时变,强耦合,非线性等特点,基于数据驱动的无模型自适应控制理论为其过渡段设计飞行控制器;并使用粒子群优化算法解决无模型自适应控制器调整参数的问题。仿真结果表明,基于数据驱动的无模型自适应控制器可实现倾转翼飞机过渡段平稳飞行,同时也证明了基于数据驱动的无模型自适应控制方法在处理时变、强耦合的非线性系统时具有其独特的优势。余雨韩[15]通过一些假设,将倾转翼飞机模型简化为纵向非线性仿真模型,以此为基础来研究纵向控制。对建立的倾转翼飞机非线性仿真模型做配平分析,设计转换通道。将非线性模型进行线性化处理,分析其过渡段飞行的纵向稳定性,分析结果表明过渡段模式下的倾转翼飞机能够在固定高度飞行时保持稳定。采用的是经典PID控制理论,分别针对飞机的俯仰角、飞行高度和飞行速度设计了三个控制器。通过仿真验证控制效果,控制方案可行。之后用极点配置法来设计纵向控制系统。通过仿真验证控制效果,效果良好,能够满足过渡段定高飞行和俯仰稳定的要求。最后加入对倾转翼飞机过渡段模式非线性模型的控制,使用PID控制对非线性模型进行研究。通过仿真验证效果,对各飞行参数的控制能够满足过渡段定高飞行和俯仰平衡的要求。王琦等[16]为满足倾转翼飞机从直升机模式到固定翼模式过渡飞行的定高控制需求,对纵向通道进行分析并建立了过渡段纵向的非线性数学模型。按照定高飞行的要求,对过渡段飞行进行配平研究并设计了转换通道。最后对模型线性化进行模态分析,分析结果表明该倾转翼飞机过渡段是稳定的。张玉婷等[17]引入一种不需要精确数学模型参数的模糊控制方法,结合经典PID控制的方式,实现对过渡段模式的控制。对于模型较复杂、参数不确定的倾转旋翼机,将模糊控制器与PID控制器结合,融入人工经验,可有效避免参数不确定给系统带来的灾难,模糊控制方法可以很快地追踪到给定值,带来较为理想的控制效果。
目前,关于倾转翼飞机过渡段的前序研究均是在仿真的基础上进行的,以定高和纵向控制为主,通过旋翼拉力和倾转段机翼倾转角度的调节,来保证无人机在过渡段的高度稳定。但都未曾针对飞机在过渡段的横侧向运动有过相关控制方法的研究。
而由于倾转段机翼面积较大,在垂直起降模式和过渡段模式下,容易受到外加干扰,发生偏航和横滚,而靠电机拉力和襟副翼偏转能否实现对飞机的控制呢?因此,对倾转翼飞机的横侧向可控性能进行研究、分析是非常必要的。
本文将建立倾转翼无人机过渡段力学模型,进行分析、求解,并对航向可控性进行分析。
1 倾转翼飞行器模式简述
1.1 平飞模式
平飞模式完全等同于普通双发固定翼飞机,升降舵、方向舵和襟副翼分别或联动控制了其俯仰、偏航和横滚。
1.2 垂直起降模式
在垂直起降模式下,可将倾转翼飞机视作一架并列式双旋翼直升机。
通过两侧旋翼转速的改变从而改变拉力,控制其横滚,并可使飞行器向左或向右侧飞;在螺旋桨的滑流下,通过倾转段机翼偏转和两侧襟副翼的差动,产生向前或向后的附加升力,形成力矩从而控制其航向偏转;由于重心在倾转轴下方,倾转段机翼向前或向后偏转,可控制飞机俯仰,同时通过襟副翼同向偏转,改变翼型弯度,获得附加升力,以抵消螺旋桨拉力产生的水平分力,也可使飞行器低速向前或者向后飞行,如图1所示。

图1 倾转翼无人机验证模型
1.3 过渡模式
飞机垂直爬升到一定高度后,随着倾转段机翼及与其一同偏转的螺旋桨动力系统向前倾转,直至达到平飞状态[18],或由平飞模型返回到垂直起降模式,即为过渡模式[19]。期间从垂直起降模式开始偏转时,由于速度低,尾翼舵效基本为零,因此控制方式与垂直起降模式基本一致更容易受到横侧向干扰。
2 建模与分析
由于在垂直起降模式和接近垂直起降状态下(起飞过渡段初始状态),速度较低,所有操控力基本来自倾转段机翼及螺旋桨拉力,因此本文只需建立倾转段机翼受力模型即可。
如图2所示,当副翼向上或者向下偏转时,倾转段翼型弯度改变,其在螺旋桨滑流作用下的升力系数会随之改变,从而产生向下或者向上的一个附加升力,用ΔL表示;电机转速改变的同时,螺旋桨拉力也需随之改变,产生的附加拉力用ΔT表示。

图2 倾转段机翼受力简图
2.1 受力特性简析
当发生向左偏航时,需要产生一个向右的力矩,使其恢复到正常航向,因此需要左侧襟副翼后(上)偏,右侧襟副翼前(下)偏,左侧电机拉力增大,右侧电机拉力减小。此时以左侧倾转段机翼受力为例进行分析,左侧倾转段机翼受力如图3所示。
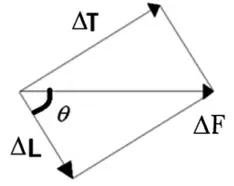
图3 左侧倾转段受力示意图
由于飞控响应时间滞后以及其他因素的影响,合力ΔF可能会产生一个微小的竖直分量。但鉴于本文只讨论航向控制问题,因此暂不考虑竖直分量的影响,认为左右两侧倾转段机翼产生的合力大小相等、方向相反。即飞机不产生俯仰和横向运动。
2.2 航向偏航力矩的估算
假设飞机在垂直起降模式下或接近垂直起降的状态下受到外部气流干扰产生偏航力矩,进而产生大小为1rad/s2的角加速度。
即飞机受外部气流干扰所产生的偏航角速度α=1rad/s2,由理论力学可知,飞机受外部气流干扰产生的偏航力矩M=Jα,若可求得飞机转动惯量J,便可得飞机所受力矩,文献[20]给出了飞机转动惯量的估算公式(图4)。

图4 飞机质量特性计算坐标系
对于大展弦比平直翼飞机,其转动惯量估算公式如下:

其中:W为飞机质量,单位为kg;b为飞机机翼展长,单位为m;l为飞机机身总长,单位为m;h为机身最大切面的高度,单位为m。
本次使用的倾转翼无人机验证机尺寸及重量等参数如表1。

表1 验证机模型参数表
将数据带入转动惯量估算公式,则可得飞机绕Z轴的转动惯量:

由此可得,偏航力矩:

即飞机受外部气流干扰所产生的偏航力矩大小约为0.21N·m。
3 抗干扰力矩的计算
文献[7]给出了倾转翼无人机在过渡段的旋翼转速变化趋势图,如图5。
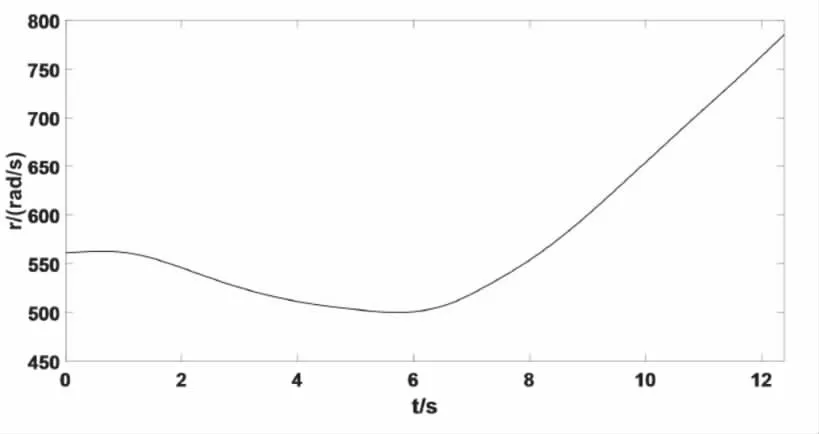
图5 无人机过渡段旋翼转速变化
可看出在整个过渡段初期,旋翼转速稍有下降,然后逐渐增大,直到转化为普通固定翼的平飞模式,而螺旋桨产生的滑流风速也遵循这个趋势,即滑流风速略有减小后逐渐增大。
本实验所用无人机模型装载电机型号为朗宇2820,KV值为570(KV表示电机空载状态下每增加1V电压时,转速的增量),表2为朗宇官方给出的此款电机力效表。

表2 朗宇2820电机KV570力效表
由表2可知,当KV值为570的朗宇2820电机搭配1265桨在转速达到7138转左右时可产生1500g的拉力,由于本次实验的模型机装载螺旋桨型号为1260,桨距低于1265的螺旋桨,故在7138转时产生的拉力略低于1500g,可近似认为单个电机搭配1260螺旋桨可产生1400g的拉力,两个电机合计产生2800g拉力可使飞机在空中处于悬停状态。
将电机搭配1260桨,对其进行风速测量,实验设备如图6。

图6 风速测量
搭配转速计,将电机转速调整至7000~7100转,此时测得螺旋桨滑流的风速在15.6~16.3m/s之间。可近似认为,在整个过渡段中,1260螺旋桨所产生的滑流风速最小值约为15m/s。
接下来将机翼最外侧倾转段取下,如图7,放至风洞进行下一步实验。
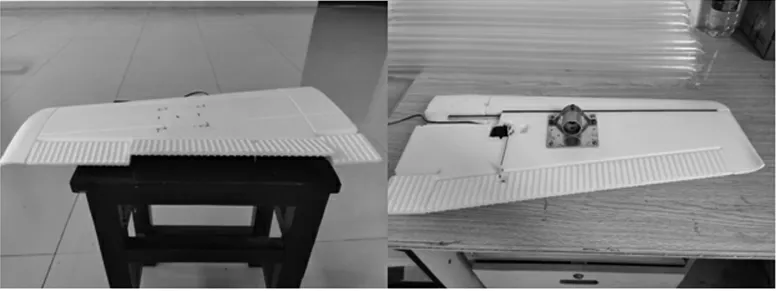
图7 机翼最外侧倾转段
将该部分机翼固定至风洞,机翼迎角约为-2°,与电机滑流同机翼迎角相同,在15m/s的风速条件下,分别测得副翼不偏转和副翼上偏至最大位置以及下偏至最大位置的升力系数,如图8。

图8 风洞实验
实验测得三组升力系数,如表3。取其平均值做后续计算依据,即副翼未动时CL为0.078975,副翼上偏时CL为0.058475,副翼下偏时CL为0.0998875。
即副翼向上偏转时产生的附加升力至少可以达到0.299N,副翼向下偏转时产生的附加升力至少可以达到0.305N,同取两边最小值0.299N。暂假设该附加载荷作用点位于螺旋桨中心位置,即力臂长度为固定段机翼长度加上两侧电机固定点至倾转段内侧长度,本模型力臂长度为d=0.9m。由图3可知,ΔF=ΔLcosθ+ΔTsinθ,θ由0到π/2逐渐增大,ΔLcosθ逐渐减小,ΔTsinθ逐渐增大。ΔT为电机的主动力,由表3可知最大值超过10N,ΔL为副翼偏转产生的气动力,其值较小,由表4和表5可知,最大值仅约为0.3N。

表3 升力系数表

表4 副翼上偏时升力差值

表5 副翼下偏时升力差值
当θ为0时,飞机受外界干扰而成的偏航力矩,要抵抗该力矩的力ΔF全由偏转副翼提供,最大值约0.3N,随着θ逐渐增大至π/2,ΔF最大值逐渐增大,最大值超过10N。即在θ=0时,外界气流干扰产生的偏航力矩最大。
θ=0时,由副翼偏转产生的最大附加偏航力矩M=ΔF·d=0.299×0.9=0.2691(N·m)>0.21(N·m)。
由此,在垂直起降模式下,或者说在起飞过渡段初始状态下,最大附加偏航力矩大于受外界气流干扰产生的最大偏航力矩,故在整个过渡段中,可以通过附加偏航力矩对外界干扰产生的偏航予以控制。
4 结论
本文对倾转翼无人机在过渡段进行力学建模,并进行一系列实验,对其进行力学分析并求解,结果证明通过旋翼和副翼的共同调节,在垂直起降状态下(θ=0),可产生因副翼偏转引起的附加偏航力矩最小,且该值大于飞机在1rad/s2的偏航角加速度极限条件下的最大值,故飞机在过渡段极限偏航状态下的航向是可控的,用同样的方法可以证明横滚也是可控的,因此证明了该结构的倾转翼无人机在现实中是可行的。
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
智能制造(2021年4期)2021-11-04 08:54:42
装备制造技术(2020年1期)2020-12-25 05:18:18
北京航空航天大学学报(2020年10期)2020-11-14 09:26:06
民用飞机设计与研究(2020年1期)2020-05-21 07:24:44
空间科学学报(2020年4期)2020-04-22 01:17:20
北京航空航天大学学报(2017年3期)2017-11-23 05:14:23
中国科技信息(2016年14期)2016-07-31 21:16:55
北京航空航天大学学报(2016年3期)2016-02-27 06:32:03
航空学报(2015年4期)2015-05-07 06:43:28