BDS/GNSS 融合精密单点定位性能分析
2021-08-07 05:48尹海博郭杭罗孝文
全球定位系统 2021年3期
尹海博,郭杭,罗孝文
(1.南昌大学 信息工程学院,南昌 330031;2.自然资源部第二海洋研究所,杭州 310012)
0 引 言
精密单点定位技术(PPP)由美国Zumbeger 等[1]于1997 年提出,它采用单台全球卫星导航系统(GNSS)接收机,利用国际GNSS 服务组织(IGS)提供的精密星历和卫星钟差,可实现mm 级到dm 级的一种卫星定位技术,具有作业模式灵活、无需基准站、成本低、精度高等优点.随着我国北斗卫星导航系统(BDS)的逐步完善、欧洲Galileo 系统的快速崛起,美国GPS 和俄罗斯GLONASS 系统的现代化,全球工作卫星数目不断增多,各系统在轨卫星数如表1 所示,多系统融合PPP 逐渐成为研究的热点[2].

表1 GNSS 在轨工作卫星数目一览表
近年来,国内外学者对组合系统PPP 的研究越来越深入.文献[3]利用MGEX(Multi-GNSS Experiment)跟踪站的数据,对BDS、GPS、GLONASS、Galileo 系统的7 种不同组合模式的动态PPP 定位精度和收敛性进行了比较.文献[4]利用MGEX 跟踪站的数据,对比了BDS/GPS 组合PPP、BDS 单系统,PPP、GPS 单系统PPP 的定位精度和收敛时间.文献[5]基于非差无电离层组合载波和伪距观测量,研究了GPS/GLONASS 精密单点实时动态定位(RTKPPP)的方法.文献[6]通过实验证明GPS/GLONASS/BDS/Galileo 四大系统融合的PPP 收敛速度和定位精度要远优于GNSS 单系统.
目前大多文献都是以GPS 为主开展组合PPP 研究,少有文献深入研究BDS 组合PPP 的定位性能.BDS 作为国之重器,是我国第一个面向全球提供公共服务的重大空间基础设施[7-9],研究BDS 组合PPP 的定位性能对于我国发展BDS 相关的应用具有一定意义.基于以上,本文开展了BDS 分别与GPS、GLONASS、Galileo 的组合研究,分析了不同BDS 双系统的PPP静态解、动态解、精度衰减因子(DOP)值、稳定性及定位精度等,旨在为BDS 系统更好地应用与推广提供参考.
1 组合系统数学模型及处理策略
1.1 定位模型
以GNSS 双频接收机处理单系统数据为例,传统PPP 使用基于双频伪距和载波相位的无电离层组合定位模型,其观测方程[10-12]为:
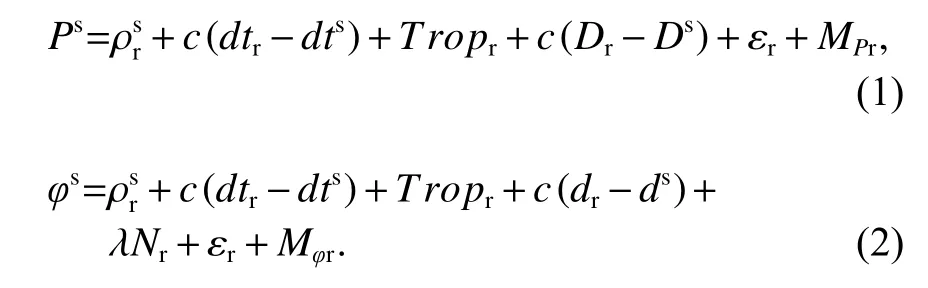
式中:Ps、φs为卫星s 无电离层组合的伪距、相位观测值;ρ 为卫星s 至接收机r 之间的几何距离;c为真空中的光传播速度;dtr和dts分别为接收机钟差和卫星钟差;Tropr为接收机对流层延迟误差;Dr和dr为接收机端伪距和载波相位的硬件延迟;Ds和ds为卫星端伪距和载波相位的硬件延迟;εr为接收机的测量噪声;λ 为无电离层组合载波波长;Nr为无电离层组合相位观测值的模糊度;Mφr、MPr为接收机的多路径误差.在PPP 参数估计时,卫星伪距硬件延迟Ds被卫星钟差吸收,接收机伪距硬件延迟Dr被接收机钟差吸收[13],卫星端与接收机端的载波相位硬件延迟与卫星有关,由整周模糊度参数吸收,考虑以上以及系统偏差,得出组合系统的观测方程为:
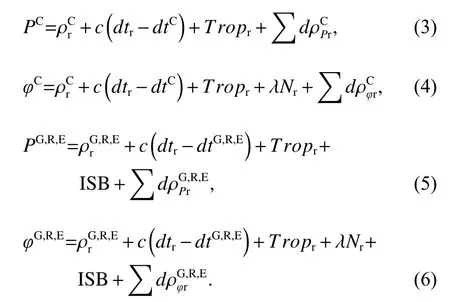
式中:G、C、R、E 分别为GPS、BDS、GLONASS、Galileo,ISB 为系统间偏差;为包括不同系统多路径误差和测量噪声在内的其余总误差.
1.2 数据处理策略
本次实验数据采用MGEX 网多个测站所采集到的BDS、GPS、GLONASS、Galileo 观测时间为2019 年10 月3 日的观测数据,以及MGEX 提供的多系统精密星历和精密钟差产品,基于RTKLIB 进行BDS 双系统PPP 解算.
双系统组合PPP 各项误差和待估参数的处理方法与GNSS 单系统PPP 相似,使用无电离层组合的双系统PPP 模型,估计方法为卡尔曼滤波,待估参数包括接收机位置、天顶对流层延迟、接收机钟差、系统偏差等,对接收机位置参数进行动态和静态处理,对流层延迟湿分量采用随机游走过程模拟,对流层延迟干分量使用Saastamoinen 模型改正,接收机钟差当作白噪声(WN)处理,系统偏差作为常数估计[14].卫星端和接收机端天线相位中心偏移(PCO)和天线相位中心变化(PCV)使用国际GNSS 服务(IGS)提供的ANTEX 文件改正,由于没有机构提供具体的BDS卫星端和接收机端的PCO、PCV 信息[15],故此处不对其改正,具体的数据处理策略如表2 所示.
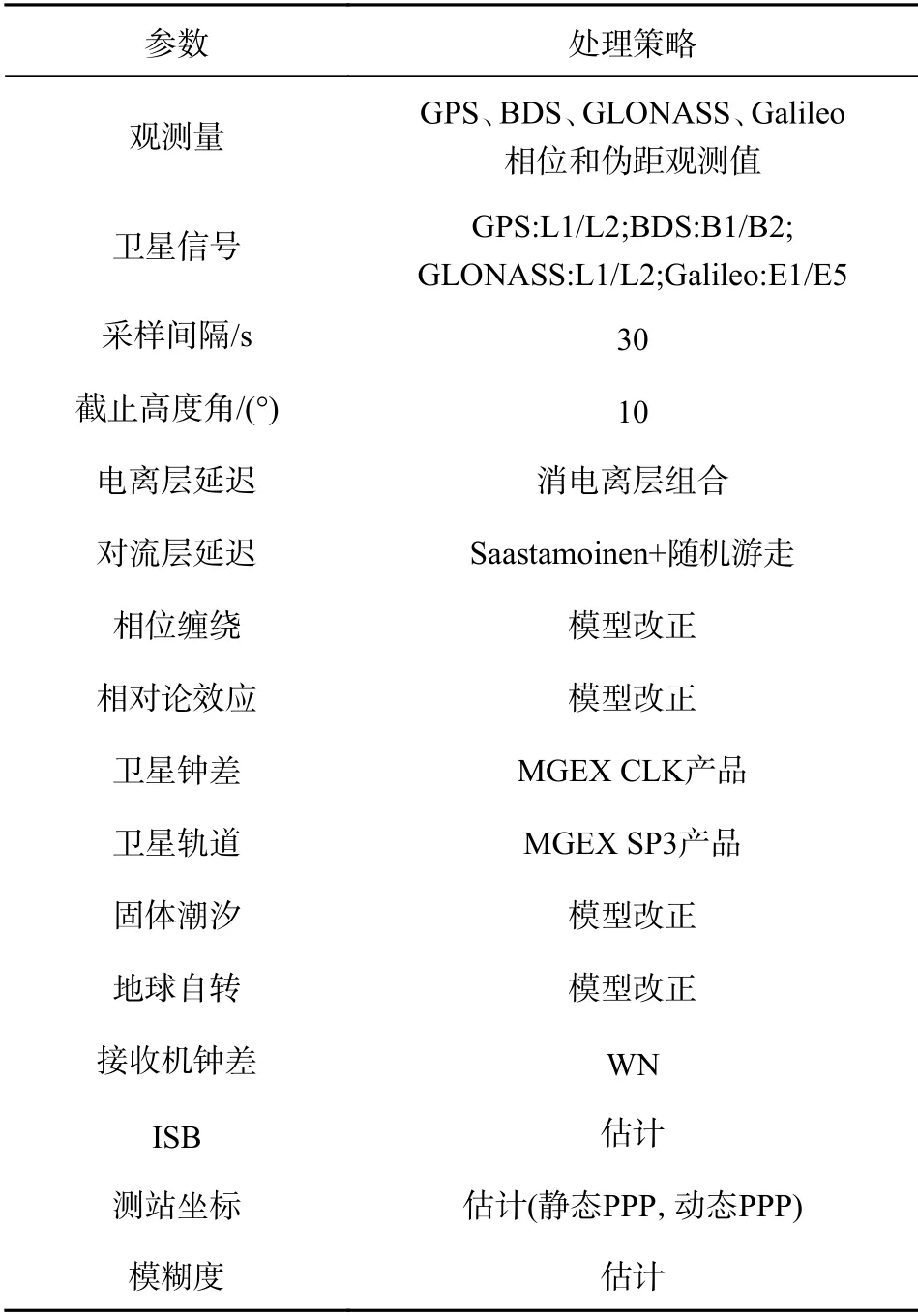
表2 双系统PPP 数据处理策略
2 实验分析
2.1 实验方案
从MGEX 下 载HKSL、BJFS、CHAN、JFNG、MIZU 等多个测站的采样间隔为30 s 的多系统观测文件以及相对应的采样间隔为30 s 的精密钟差、精密轨道产品,观测时间长度为1 天,基于RTKLIB 的自编程序实现BDS/GPS、BDS/GLONASS、BDS/Galileo三种组合PPP,从静态PPP 和动态PPP 对三种组合系统进行分析,根据不同组合的可见卫星数、DOP、定位精度、收敛速度等方面分析三种组合系统的定位性能.所选测站的信息如表3 所示.
表3 测站信息 (°)
2.2 静态PPP 结果分析
以MIZU 测站为例进行结果分析,三种组合系统的可见卫星数如图1 所示,由图1 可知,图1(a)中BDS/GPS 组合可见卫星数的数量是三种组合系统中最多的,当天的可见卫星数在10~20 颗,平均可见卫星数可达15 颗.图1(b)中BDS/GLONASS 组合系统的当天可见卫星数在3~10 颗,是三种组合系统中最少的,平均可见卫星数为7 颗.图1(c)中BDS/Galileo 组合系统的可见卫星数要高于BDS/GLONASS 组合系统,当天可见卫星数在7~17 颗,平均可见卫星数为12 颗.
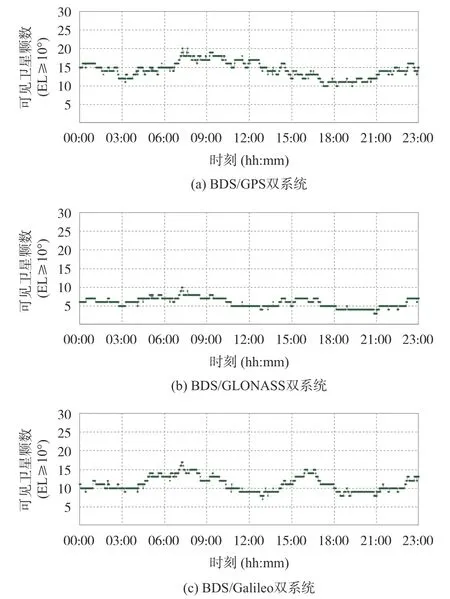
图1 MIZU 测站三种双系统可见卫星数
MIZU 测站三种组合系统的DOP 值,如图2 所示.本文选取分析的DOP 值包括水平分量精度因子(HDOP)、垂直分量精度因子(VDOP)、位置精度因子(PDOP)、几何精度因子(GDOP).DOP 值是位置质量的指示器,它是考虑每颗卫星相对于星座(几何位置)中其他卫星的位置来预计用该星座能得到的位置精度的计算结果.DOP 值的大小与定位误差成正比关系,小的DOP 值表示强的卫星几何位置和较高的定位精度,高的DOP 值表示弱的卫星几何位置和较低的定位精度.由图2 可知,图2(a)BDS/GPS 组合系统的各DOP 值最小,图2(b)BDS/GLONASS 组合系统的各DOP 值最大,且波动起伏较大.以此结果预估BDS/GPS 组合系统的PPP 性能将最好,图2(b)BDS/Galileo 次之,BDS/GLONASS 最差.
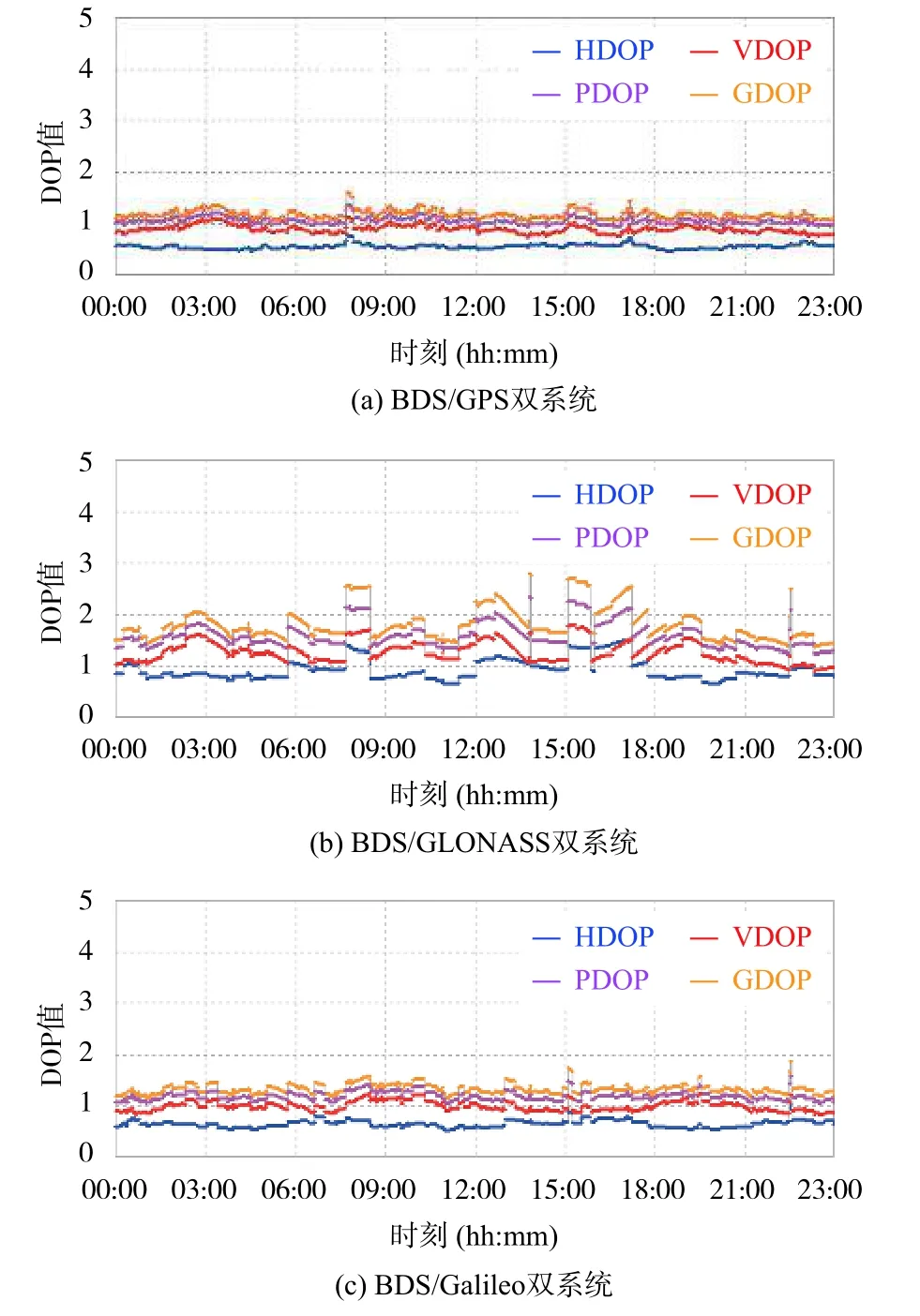
图2 MIZU 测站三种双系统DOP 值
将静态解算的结果与IGS 发布的坐标作差,绘制三种组合系统在东(E)、北(N)、天(U)方向的偏差图,三种组合系统静态PPP 在E、N、U 方向的偏差如图3(a)~(b)所示,并记录了多个测站的静态均方根(RMS)值,如表4 所示.总体看来,BDS/GPS 组合系统在E、N、U 三个方向上收敛速度和收敛后的定位精度都是最优的,三个方向的收敛时间在30 min 左右,收敛后的精度达到0.06 m 以内,原因是GPS 系统相对其他系统在轨卫星较多,用于定位的4 颗卫星空间几何分布较好.BDS/GLONASS 组合系统在N、U方向上的收敛时间在1.5 h 左右,收敛后的精度能达到0.10 m 以内,而E 方向的定位结果抖动较大,完全收敛时间较长,收敛后的精度在0.10 m 以内.BDS/Galileo 组合系统的U 方向收敛最快,在30 min 左右,收敛后的精度在0.10 m 以内,而E、N 方向都在1.5 h 左右才达到收敛.
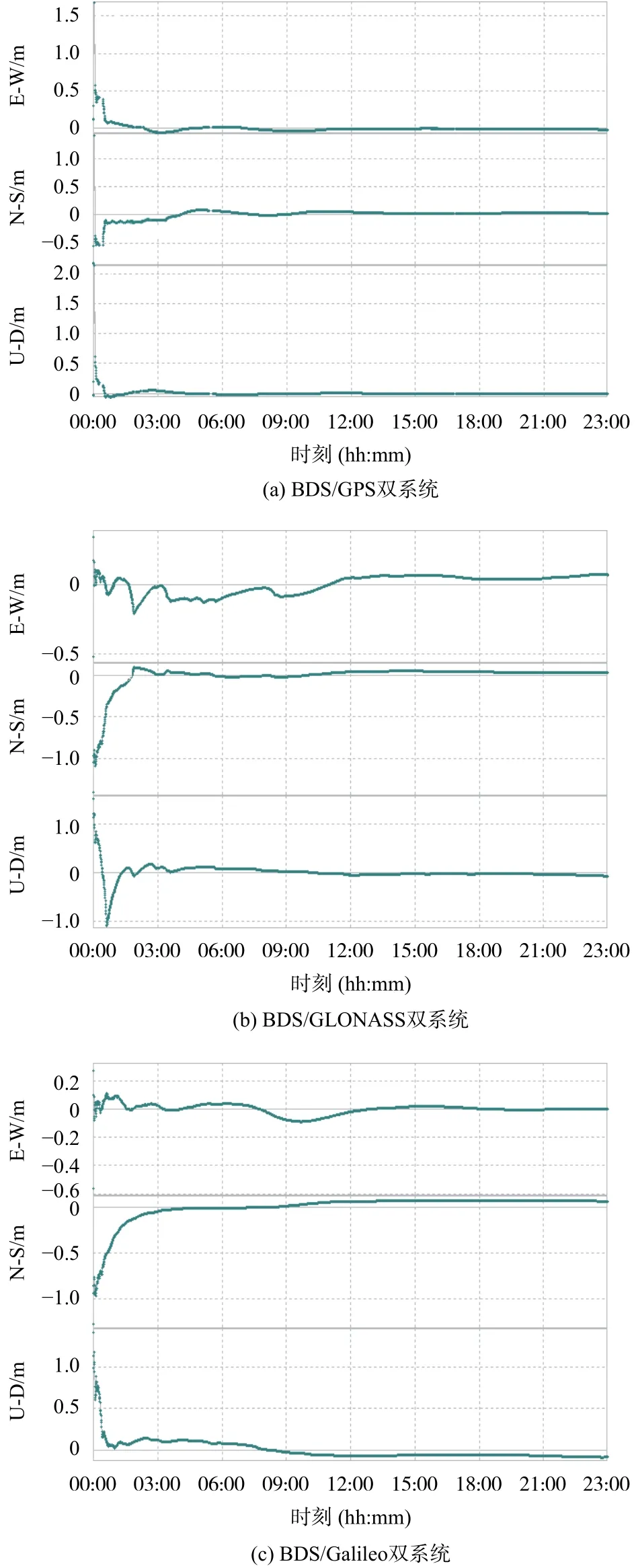
图3 MIZU 测站三种组合系统静态PPP
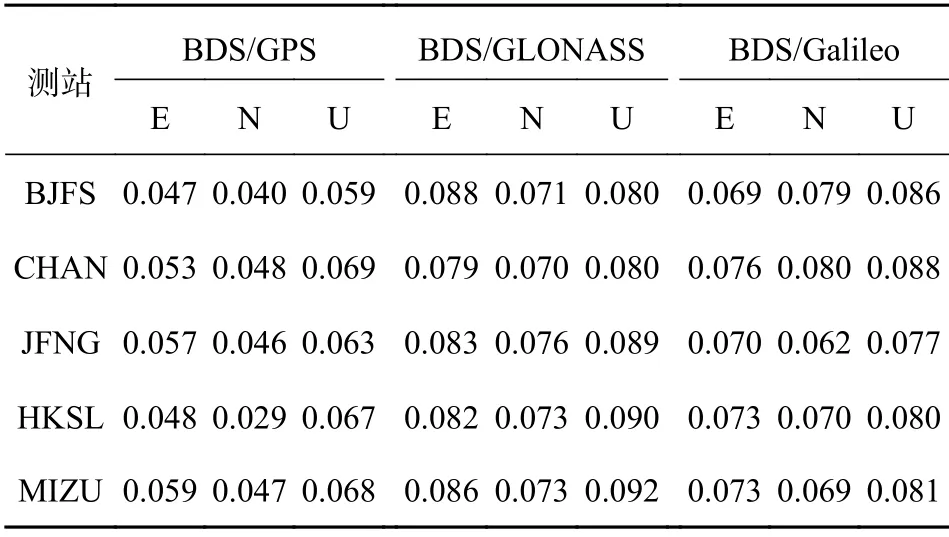
表4 2019 年10 月3 日各测站1 天的静态PPP RMS 值 m
2.3 动态PPP 结果分析
由于动态PPP 没有可靠的外部参考坐标[14],并且静态观测数据质量一般要比动态数据好,且较容易估计天顶对流层延迟,故本文采用静态模拟动态的实验.为了更好的分析动态PPP,采用与静态PPP 相同测站的实验数据,在数据处理策略上不同的是动态PPP 每个历元估计一组位置参数,其它数据处理策略与静态PPP 一致.对BDS/GPS、BDS/GLONASS、BDS/Galileo 三种组合系统分别进行动态处理,同样选取MIZU 测站为例进行动态PPP 分析,将定位结果绘制成E、N、U 方向的偏差图,如图4(a)~(b)所示.
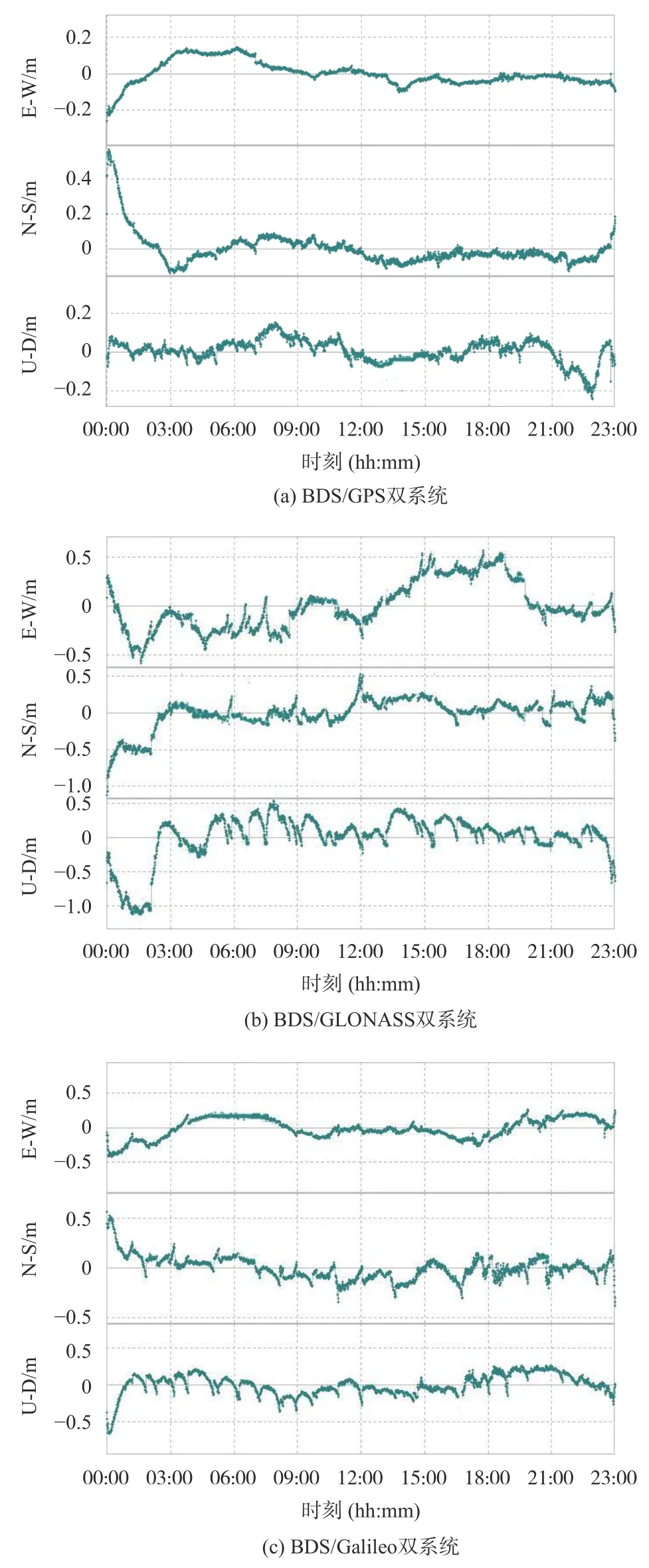
图4 MIZU 测站三种组合系统动态PPP
通过对BDS/GPS、BDS/GLONASS、BDS/Galileo三种组合系统的动态解算结果偏差图进行对比分析,从中可以看出BDS/GPS 组合系统动态PPP 的偏差曲线相对BDS/GLONASS、BDS/Galileo 要平滑很多,说明BDS/GPS 组合系统具有更高的稳定性和更小的定位抖动,抖动产生的原因是动态解算中每个历元解算获取初值的途径不同[15],卡尔漫滤波对状态的估计机制以及对噪声的处理机制也不相同,BDS/GPS动态PPP 收敛后E 方向的精度优于0.12 m,N 方向优于0.10 m.BDS/GLONASS 组合系统的动态PPP结算结果偏差曲线波动起伏较大,说明该组合系统的定位抖动较大、稳定性较差,同时定位精度在三者中也是较差的,三个方向收敛后的精度约在0.50 m 以内,收敛时间平均在1~2 h.BDS/Galileo 组合系统总体定位性能稍好于BDS/GLONASS 组合系统,没有BDS/GLONASS 组合系统那么大的定位抖动,三个方向平均收敛时间约在50 min 以内,E 方向收敛后精度优于0.20 m,N 方向优于0.25 m,U 方向优于0.27 m.
3 结 论
随着BDS 成功实现全球组网,标志着BDS 服务范围由区域扩展为全球,BDS 正式迈入全球时代.BDS 与其他导航系统组成的多系统组合定位已成为趋势,因此,本文基于RTKLIB 开源代码和Visual Studio 2017,利用MGEX 网多个测站的实测数据以及对应的精密钟差和精密轨道产品,实现了BDS/GPS、BDS/GLONASS、BDS/Galileo 三个组合系统的实验,分析了各个组合系统的动、静态PPP 定位精度和收敛性,结果表明:不论是动态PPP 还是静态PPP,BDS/GPS 组合系统的定位性能都是最优的,BDS/GLONASS 和BDS/Galileo 组合系统动态PPP的定位抖动起伏较大,稳定性稍差.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
测绘地理信息(2022年2期)2022-04-02
导航定位学报(2022年1期)2022-02-17
导航定位学报(2022年1期)2022-02-17
全球定位系统(2021年2期)2021-05-24
中国电气工程学报(2019年18期)2019-10-21
智富时代(2019年4期)2019-06-01