
智能车辆路径跟踪横向控制研究
2021-08-06 06:18成海飞黄林雄赵奉奎吕立亚
重庆理工大学学报(自然科学) 2021年7期
张 涌,夏 雨,成海飞,黄林雄,赵奉奎,吕立亚
(南京林业大学 汽车与交通工程学院,南京 210037)
智能车辆在实际行驶的过程中,需要完成环境感知、路径规划以及运动控制等任务。智能车辆在面对交通事故频发、交通堵塞以及环境污染方面具有明显的优势[1-2]。
目前对于车辆的路径跟踪横向控制,主要的控制算法有PID控制[3-5]、滑模变结构控制[6-8]、模糊 控 制[9-10]、模 型 预 测 控 制[11-12]、最 优 控制[13-15]、自适应控制[16-17]等。
赵熙俊等[3]基于航向偏差生成器生成期望航向,求出其与惯性元器件测出的实际航向之间的差值,采用经典PID算法控制该差值,从而实现路径跟踪横向控制。该控制方法简单明了,方便操作,但对控制要求较高的场合适应性差且控制精度低。王聪[6]将建立的动力学模型和预瞄误差模型结合,生成横向预瞄误差模型,基于该模型建立路径跟踪滑模控制器,仿真验证了该控制器的良好跟踪效果和鲁棒性,但由于运动点趋于滑模面附近会高频转换,产生剧烈抖振,从而影响车辆的稳定性和乘坐舒适性。Trabia M等[9]基于模糊理论设计了模糊横向控制器,具有不依赖精准的数学模型的优点,但控制器中隶属度函数和控制规则的建立往往需要专家知识和人工经验,难以根据系统特性进行自动调整,具有较强的主观性,会产生较大的误差。Klancar等[12]提出了一种模型预测横向控制方法,不断预估未来环境信息,从而动态地跟踪系统的误差,并从二次型代价函数出发,推导出控制律来处理系统的跟踪误差。虽然该控制方法能稳定地跟踪路径,但是不适用不稳定系统及对象。Lee等[15]设计了线性二次最优预瞄控制器来跟踪期望路径,实车验证表明,该控制算法在不同驾驶环境下都具有较高的控制精度,但对外界干扰的适应性和鲁棒性较差,从而影响车辆行驶的稳定性。李红志等[16]为了模拟驾驶员的实际驾驶行为,基于最优预瞄驾驶员模型设计了一种预瞄时间自适应控制算法。该控制算法能自适应选择合适的预瞄时间,不断调整横向偏差和横摆角偏差,能够较好的体现驾驶员的操作过程,但是该控制算法由于只对信息进行简单处理,控制精度较低且动态品质差,不适用于对控制系统精度要求高的场合。
综合上述分析可知,采用单一的控制算法来设计智能车辆横向控制器,很难同时满足精确性、稳定性和实时性的要求,所以多种控制方法同时配合建立控制系统已成为研究重点和趋势。因此结合滑模变控制算法与模糊控制算法的优势并结合预瞄控制的优点,提出了基于预瞄控制和模糊滑膜控制的智能车辆横向控制算法。该控制算法既不依赖系统精准数学模型,也柔化了控制信号,削弱高频转换产生的抖振,从而提高了车辆转向时的稳定性。
1 建立车辆动力学模型
所建立动力学模型主要应用于智能车辆的路径跟踪控制领域,而智能车辆在路径跟踪横向控制的过程中主要涉及横向和横摆运动。因此,为了简化模型的复杂性,减小计算量,针对实际车辆做出以下假设:
1)忽略转向操作机构的影响,直接把前轮转角作为输入,并假定左右前轮转角相等;
2)不考虑悬架的影响,同时忽略车辆的俯仰运动、垂直运动与侧倾运动,只研究车辆横向及横摆方向的运动;
3)忽略载荷对两侧轮胎侧偏特性的影响,认为车辆左右两侧动力学对称,且假设轮胎侧偏力和侧偏角成线性关系。
根据上述假设,可以采用单个车轮来替代车轴上的2个车轮,以此把4轮车辆简化成单轨车辆模型,车辆动力学模型如图1所示。

图1 车辆2自由度模型示意图
经过进行相关计算分析,可得如下车辆动力学方程:
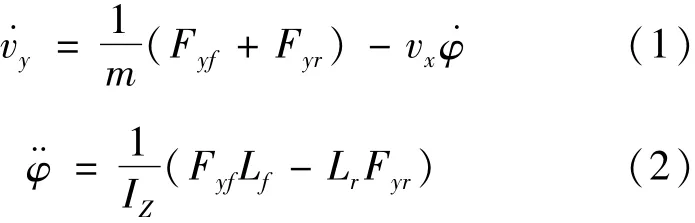
式中:m表示整车质量(kg);vx、vy分别表示纵向车速和横向车速(m/s);分别表示车辆的横摆角速度及其变化率;Iz为质心点绕z轴的转动惯量(kg·m2);Fyf、Fyr分别表示车辆前后轮侧偏力(N);Lf、Lr分别表示车辆质心至前后轴的距离(m)。
根据本节开头的假设(3)得出轮胎纵偏力与侧偏角的线性关系如下:

式中,Cf,Cr为车辆前后轮胎的侧偏刚度;af=为 车辆前后轮侧偏角(rad)。
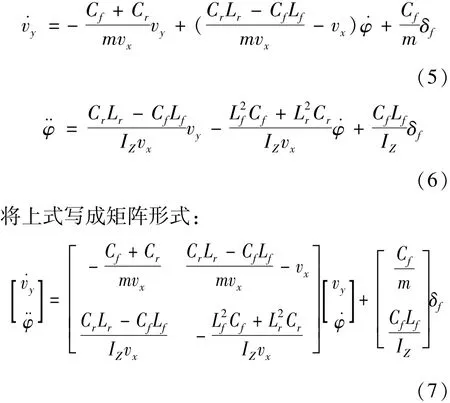
综合上述分析,可得车辆动力学方程为:
2 建立预瞄模型
以往对智能车横向控制的研究多采用反馈控制法,该控制方法只观察当前位置信息,不能满足对控制的实时性要求。智能车在动态的环境中行驶时,将会遇到各种突发状况,因此需要采取预瞄控制策略,保证车辆在行驶过程中能预先判断前方路径,并提前作出相应决策,实时控制车辆从而更好地跟踪期望路径[15]。
2.1 建立预瞄模型
横向偏差和方位偏差的获取是进行路径跟踪的前提,因此参考郭孔辉提出的预瞄理论,建立车辆预瞄模型获得这2个偏差。偏差简易计算图如图2所示。
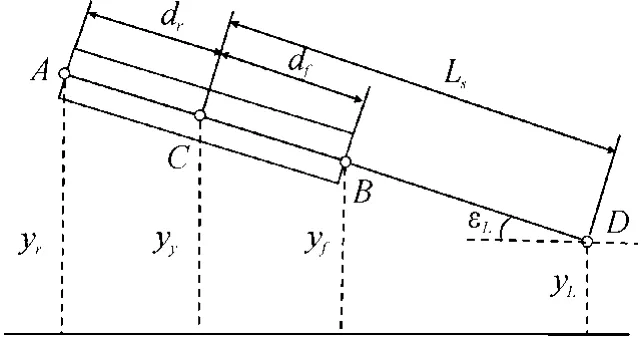
图2 偏差计算示意图
经推导可知,智能车辆的预瞄运动学模型如下:


式中:εL表示方位偏差;yL表示横向偏差;vx、vy分别表示纵向车速和横向车速;ωr表示横摆角速度;ρ为道路曲率;Ls为预瞄距离。
2.2 选取预瞄距离
通过选取预瞄距离,智能车辆能够预估前方道路环境信息,从而提前作出判断和决策。预瞄距离的选取是预瞄跟踪中至关重要的一步。预瞄距离在很大程度上受车速变化影响,随着车速不断增大,为了保证安全行驶需增加预瞄距离;当车速降低时,预瞄距离也随之呈减小趋势,二者大体上呈正相关变化。但是,预瞄距离的取值需小于视觉系统的最大可视距离。参考郭孔辉院士提出的相关预瞄理论得出预瞄距离与速度的关系图,如图3所示,式(10)为预瞄距离计算公式:
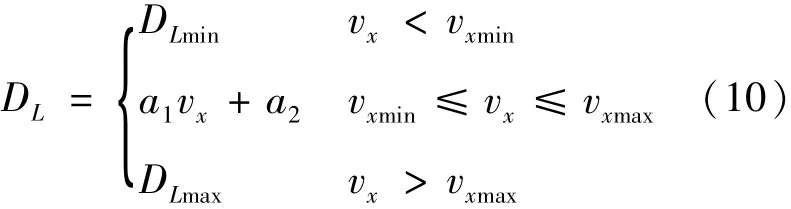
式中:DLmin、DLmax分别表示智能车辆最小和最大预瞄距离;Vx表示智能车的当前速度(m/s)。根据相关实验选取DLmin为4.5 m,DLmax为15.6 m,Vxmin为25.2 km/h,Vxmax为57.6 km/h,a1为1.233 s,a2为-4.131 m。预瞄距离选取结果如图3所示。
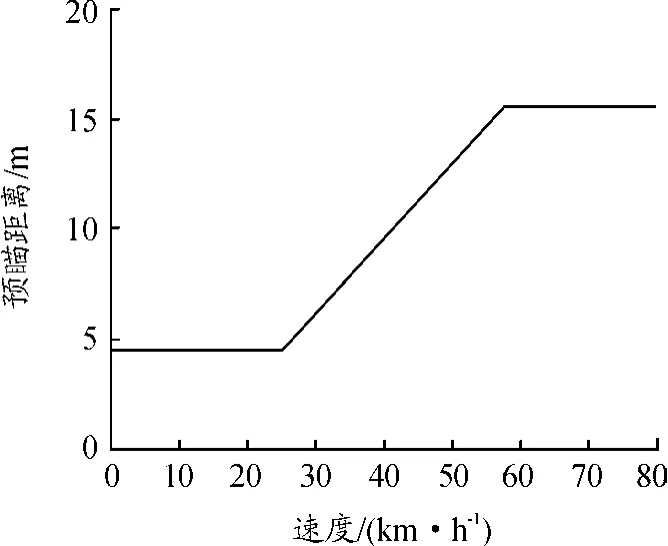
图3 预瞄距离选取曲线
3 基于模糊滑膜控制的横向控制器
结合滑模控制算法与模糊控制算法的优势,设计了一种智能车辆横向控制算法,该算法既沿袭了模糊控制的最大优点,即不依赖系统精准数学模型,同时柔化了控制信号,削弱高频转换产生的抖振,从而保证了转向盘转动的稳定性。所设计的控制系统总体结构如图4所示,通过建立预瞄模型算出当前位置与期望路径之间的偏差,即横向偏差yL和方位偏差εL。为了简化计算,对2者进行融合,得到融合偏差eL。横向控制器由滑模变结构和模糊控制结构组成,把融合后的偏差eL构成滑模函数s并求出其变化率˙s,将2者作为模糊控制器的输入,该操作可以将路径跟踪中原本对误差的控制转化为对滑模函数的控制,只需施加控制使其降为0即可,最后模糊控制器输出前轮转角并反馈给智能车辆,智能车辆通过转动方向盘调整转角从而实现路径的跟踪。
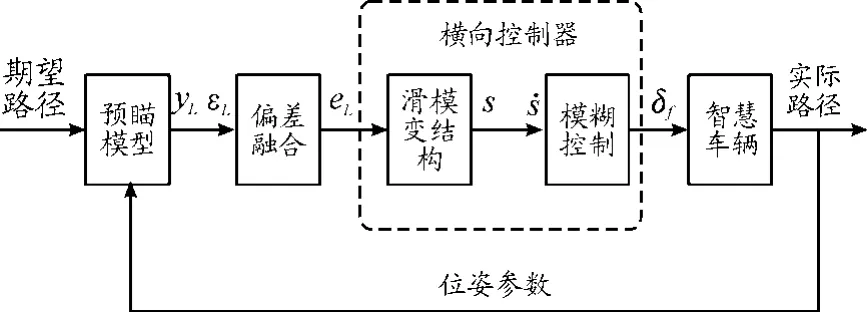
图4 横向控制系统总体结构示意图
3.1 横向偏差与方位偏差融合
模糊控制器的维数由输入变量的个数决定,输入量越多则维数越高,使得控制系统结构复杂,很大程度上增加了计算量。因此必须减少输入量来降低控制器的维数,故采取融合的方式处理横向偏差和方位偏差,从而生成集成偏差,然后将集成偏差及其微分作为系统的输入,通过这一方式把高维控制器转化为更易实现的二维控制器。接下来介绍具体操作步骤,首先,根据极值法对2者进行无量纲化处理,具体公式如下:


其中,η1、η2均为大于零的系数,且η1+η2=1,eL即为融合后的偏差。
3.2 建立滑模函数
考虑到模糊、滑模这2种控制方法相结合的优势,设计滑模函数作为模糊控制器的输入,可以将路径跟踪中原本对误差的控制转化为对滑模函数的控制,只需施加控制使其降为0即可,根据常值切换函数的设计方法,选取集成偏差来建立控制系统所需的滑模函数s,形式如下:

其变化率表达式如下:

其中,c1为常数分别为集成偏差及其1阶导数和2阶导数。
滑模变控制最大的缺点就是易产生抖振,这是由于趋近律的作用原理而造成,控制效果再好的趋近律也会造成一定的抖振。因此本文放弃选取趋近律,只设计滑模函数输入到模糊控制器,克服了抖振现象,从而提高了控制器的精度和稳定性。
3.3 模糊控制器的设计
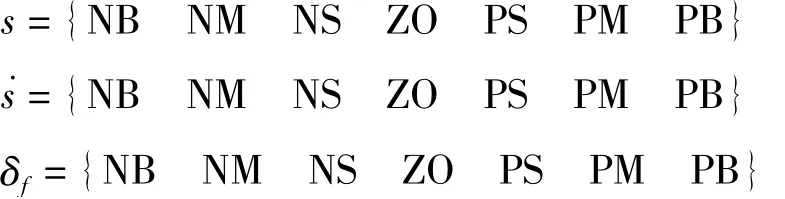
选择双输入的二维控制器,输入变量为滑模变结构的切换函数s及其变化率˙s,输出变量为车辆前轮转角δf。
1)模糊化
将3个变量的量化等级均设定为7级对模糊空间进行分割,7级对应如下:NB=负大,NM=负中,NS=负小,ZO=零,PS=正小,PM=正中,PB=正大。


最后选取变量的隶属度函数。在论域的零点附近选用三角型隶属度函数,增加模糊子集的分布密度,起到准确灵敏的控制效果;在2边区域则选用较平缓的隶属度函数,即Z型和S型隶属度函数。3个变量隶属度函数如图5所示。

图5 3个变量的隶属度函数曲线
2)制定模糊控制规则
在模糊控制系统中,确定合理的模糊控制规则至关重要,它也是整个控制器设计中最核心的部分,基于驾驶员的相关知识和实际驾驶经验,并按照49条“IF-THEN”控制规则来生成所需模糊控制规则,具体控制规则见表1。

表1 模糊控制规则
3)模糊推理和反模糊化
根据合成运算法则的不同,生成不同的模糊推理方法。因Mamdani推理法是模糊推理中最常用的一种方法,其模糊蕴含关系简单,故本文采用Mandani推理法。
模糊推理后产生的控制量,需要通过反模糊化转化为能被一般控制系统处理的精确量。选择重心法完成反模糊化操作,其数学表达式如下:

4 仿真分析
基于车辆模型、预瞄模型及上一节建立的横向控制器,在Simulink平台中搭建智能车辆横向控制仿真模型,并针对不同参考路径对横向控制算法进行仿真验证。仿真模型如图6所示。
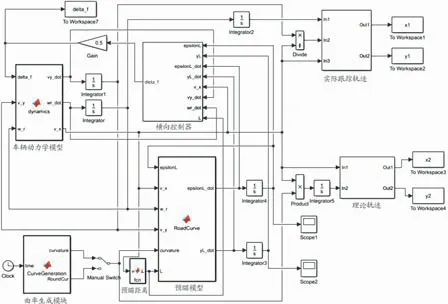
图6 横向控制Simulink模型框图
4.1 参考路径Ⅰ仿真分析
仿真先选用一段相对简单的参考路径Ⅰ,如图7所示。该参考路径由单纯的直线路段和稳定曲率的几段弯曲路段组成,主要为了检验直路突变为弯路和弯路突变为直路时控制器的跟踪效果。初始曲率设置为0,检验横向控制器的直线路径跟踪效果,其中30~50 s路径变化相对复杂,曲率从-0.01 m-1急剧变为0.01 m-1,更好地验证横向控制器对路径突变的适应能力。仿真中设置智能车辆的行驶车速为5 m/s,初始横向偏差为0.2 m,初始方向偏差为0.1 rad,根据预瞄距离计算公式求出该速度下对应的预瞄距离为4.5 m。
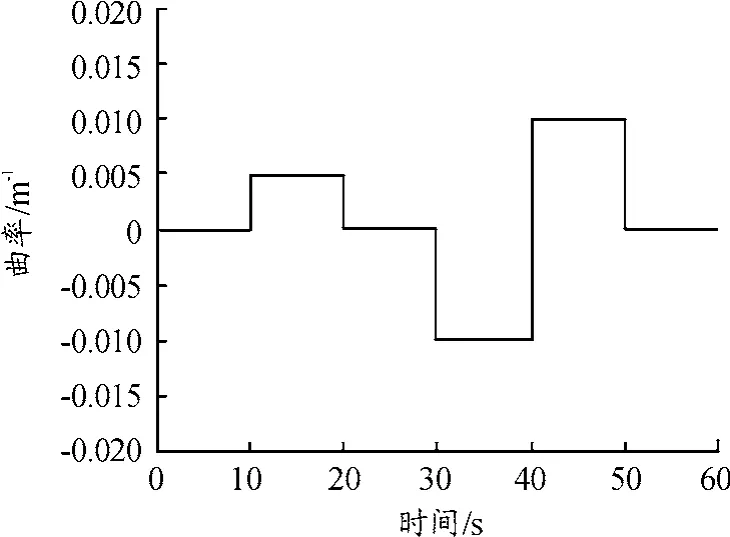
图7 参考路径Ⅰ示意图
车辆在控制器作用下得到的横向及方位偏差响应曲线如图8、9所示,由图可知横向偏差大体控制在±0.016 m之间,方位偏差控制在±0.006 8 rad之间,最大稳态误差均发生在曲率为±0.01 m-1路段。
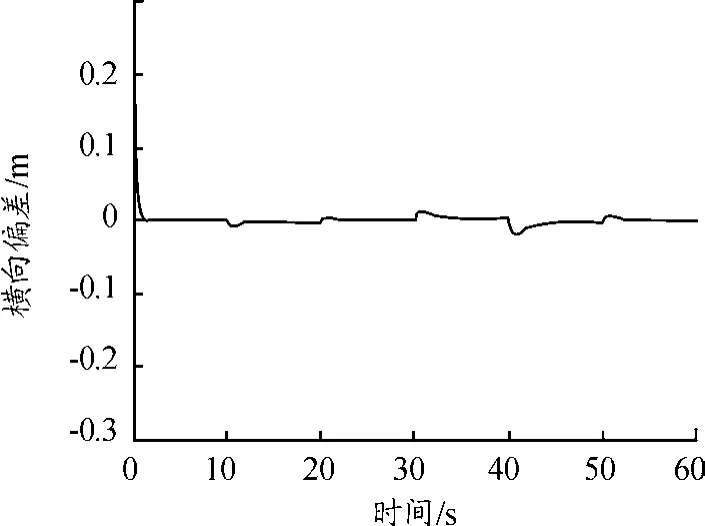
图8 横向偏差响应
通过对图8和图9进行分析可知,初始阶段的横向偏差和方位偏差会在短时间内迅速收敛,偏差处于很小的变化范围内,曲线变化比较柔和,能够很好的抑制抖振。图10所示为车辆跟踪参考路径Ⅰ的轨迹误差曲线,可以看出,经横向控制器调整前轮转角后,实际轨迹与期望轨迹几乎重合,故该控制器能够精确地控制车辆跟踪期望轨迹。

图9 方位偏差响应
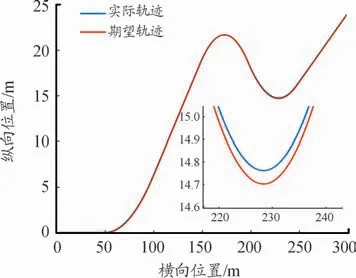
图10 参考路径Ⅰ轨迹误差
4.2 参考路径Ⅱ仿真分析
为了提高跟踪难度,设计一段相对恶劣复杂的路径,检验所设计的模糊滑模控制器在该路况下的控制效果,参考路径Ⅱ如图11所示。
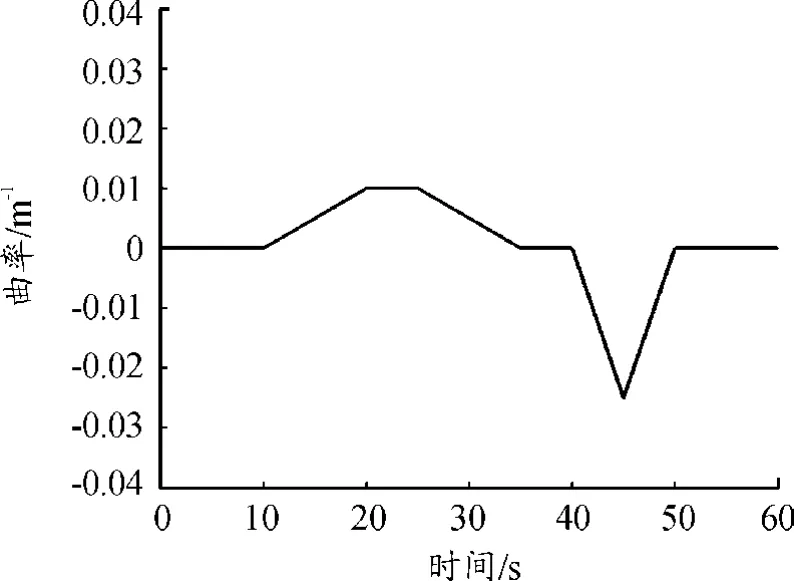
图11 参考路径Ⅱ示意图
相比参考路径Ⅰ,该路径曲率变化幅度较大,几乎随时间不断变化,尤其是30~50 s内,曲率急剧增大又突变成0,最大曲率达到0.025 m-1,使跟踪难度大大增加,能够更好地检验横向控制器在恶劣工况下对弯路的跟踪效果。设置与参考路径Ⅰ相同的行驶车速、初始偏差和预瞄距离进行仿真研究。
智能车辆的横向偏差响应如图12所示,横向偏差控制在±0.013 m之间,稳定在很小的范围内;在相同速度下方位偏差响应曲线如图13所示,最大误差为0.017 rad,发生在40~50 s曲率变化较快的路段。通过分析可以得到如下结论:虽然复杂的路径提高了跟踪难度,但偏差仍保持较快的收敛速度且控制在较小范围内,曲线变化柔和,无明显抖振。图14所示为车辆跟踪参考路径Ⅱ的轨迹误差曲线,显示在横向控制器作用下,控制实际轨迹几乎与理论轨迹重合,跟踪精度较高。因此本文所设计的控制器在更加复杂的路况下也能满足智能车辆横向控制的要求,能够平稳精确地控制车辆跟踪期望轨迹。
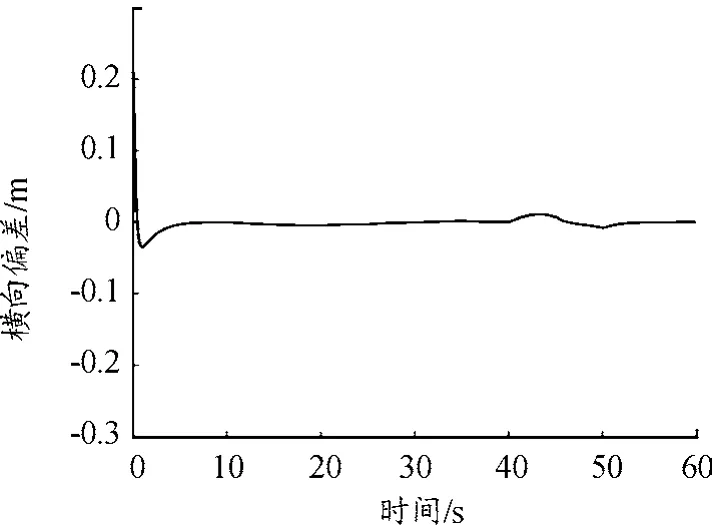
图12 横向偏差响应

图13 方位偏差响应

图14 参考路径Ⅱ轨迹误差
4.3 对比仿真分析
为了验证本文控制算法的优越性,本文进行了对比仿真分析。由上述仿真分析可知,路径Ⅱ的跟踪难度高于路径Ⅰ,因此在验证算法优越性时,采用路径Ⅱ作为仿真路径。仿真得出的横向偏差以及方位偏差响应如图15、16所示。
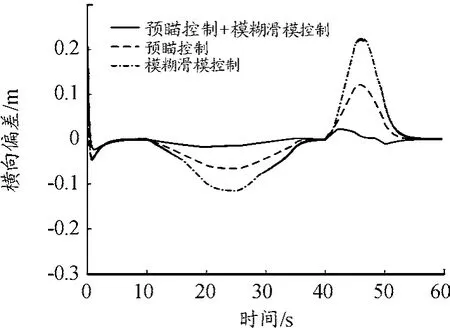
图15 横向偏差响应
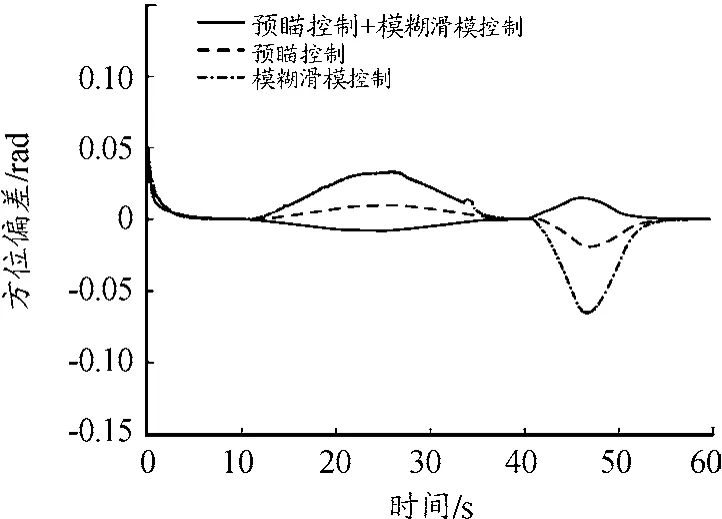
图16 方位偏差响应
由图15可知,传统的模糊滑模控制的横向偏差的变化范围在-0.11~+0.23 m,变化范围达到了0.34 m;传统的预瞄控制的横向偏差的变化范围在-0.065~+0.12 m,变化范围达到了0.185 m;而本文中提出的控制算法的横向偏差的变化范围为0.04 m。由图16可知,传统的模糊滑模控制的方位偏差的变化范围在-0.065~+0.03 rad;传统的预瞄控制的方位偏差的变化范围在-0.02~+0.1 rad;而本文中提出的控制算法的方位偏差的变化范围为-0.007~+0.015 rad。为了方便观察,具体差异如表2所示。

表2 采用不同方法的仿真结果
通过对图15、16的综合分析以及表2的具体对比结果显示,提出的横向控制算法与传统的控制算法相比,横向偏差和方位偏差的变化范围更小,曲线整体变化更加平稳,因此,提出的横向控制算法展现出更好的控制效果。
5 结论
提出了基于预瞄控制和模糊滑模控制的车辆横向控制算法。首先,基于预瞄模型来设计横向控制策略,保证车辆在行驶中提前预估前方道路环境信息。其次,提出了一种模糊滑模横向控制算法,采用由集成偏差组成的滑模切换函数及其微分作为模糊控制器的输入,把对误差的控制转化为对滑模函数的控制。该控制方法既保留了模糊控制不需要依赖精准数学模型的突出优点,又能削弱滑模面附近由于高频转换产生的剧烈抖振,保证了转向盘转动的稳定性。最后仿真结果表明了该横向控制算法能够准确稳定地跟踪期望路径,满足横向控制的要求。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
幼儿园(2021年12期)2021-11-06
建材发展导向(2021年14期)2021-08-23
中国测试(2018年9期)2018-05-14
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15
