
航空集群系统空对地作战效能涌现方法研究*
2021-08-06 06:25杨昌发冷智辉
火力与指挥控制 2021年6期
杨昌发,任 勇,冷智辉,沈 亮,万 芩
(1.航空工业洪都,南昌 330024;2.空军研究院系统工程研究所,北京 100076)
0 引言
航空集群是由一定数量的单功能或多功能、有人或无人航空飞行器共同组成,以交感网络为基础,整体具有能力涌现和行为可控、可用、可发展的智能系统[1-3]。航空集群系统在不同战场态势下,通过不同平台的功能耦合以及不同构型的效应来产生效能涌现[4-6]。因此,航空集群系统不是多平台的简单编队,其集群能力也不是各平台能力的简单叠加,而是按照一定的“构型”将各平台组织起来,实现“1+1>2”的整体动态能力提升。
美国空军科学顾问委员会明确指出:“未来的作战飞行器应当以成群而非单独的方式行动”。可见,多平台集群作战将成为未来空中作战的主要样式[7-8]。如何对航空集群系统的作战能力进行评估,成为集群作战领域中的研究热点。本文基于航空集群系统典型对地作战过程,对航空集群的特点及相应能力进行分析,在航空集群系统的网状指标体系中提炼出了对地作战能力评估指标体系分支,并在“机群”作战效能评估理论的基础上,构建了“集群”作战效能涌现评估方法。通过航空集群系统中无人-有人机协同作战为算例,评估集群作战效能,为评估航空集群系统的对地攻击作战能力提供一种理论方法。
1 航空集群系统评估指标体系构建
1.1 指标体系概述
为了评估不同作战行动方案或武器装备的优劣,需要采用某种定量尺度去度量作战行动或武器系统的效能,这种定量尺度即效能指标[9-11]。由于作战情况的复杂性和作战任务要求的多重性,效能评估常常不可能用单个明确定义的效能指标来表示,而需要用一组效能指标来刻画。这些效能指标分别表示武器系统功能的各个重要属性。
航空集群系统作战效能评估重点考虑集群内节点的自组织能力和整体的行为调控能力,属于体系效能范畴。对于评估指标体系的构建应实现3 个转变,一是将“树状”转变为“网状”,结合复杂智能系统的非还原性质,各指标之间是网状结构而非树状的关系;二是将“简单求和”转变为“涌现叠加”,不能用局部指标简单求和来得到整体涌现效果,应寻求新的非线性方式;三是将“单一值”转变为“结果云”,评估结果与威胁环境、目标、决策等相关,是多变的、动态的。
航空集群系统效能评估指标体系的网状结构应由有人机集群、有人/无人协同、无人机集群3 个主要形式的空对空、空对地作战体系组成,如图1 所示。

图1 航空集群作战效能评估指标体系网状结构
通过选取评估指标体系网状结构中的一条树状分支,以非线性方式进行涌现模型构建,并在效能结果云中选取系列评估点,进行举例分析。
1.2 指标体系中的评估要素
根据OODA 攻击链,可分为探测、信息传递、态势生成、任务规划、对抗/突防/攻击等5 个阶段,并对各阶段形成评估要素。
1.2.1 探测阶段
由于作战任务区域的环境复杂性、目标的不确定性等因素,使得目标搜索问题十分复杂。该阶段的关键在于通过多机多传感器协同配合,如可见光和红外、可见光和雷达等传感器相互配合,完成遮挡条件下目标的检测与定位,并且通过任务分工,编队构型配置等来提高区域覆盖范围和精度,保证时敏目标的侦察窗口[12-13]。关键要素包含传感器种类、探测距离、覆盖范围、目标定位精度等。
1.2.2 信息传递阶段
如何将感知到的目标、平台状态信息传递到其他个体,使得整个系统既能满足可用带宽限制以减小被侦测到的概率,又能满足协同控制和决策[14-15]。该阶段的关键在于通过各飞机作为通信网络节点,改变不同空间分布的拓扑结构,以应对强电磁干扰环境下通信的延迟、丢包、异步等情况,并克服由于分布式的应用环境、平台计算能力差异导致的空间、时间不确定性。关键要素包含时延、网络安全性、带宽、节点数量等。
1.2.3 态势生成阶段
由于在探测时会产生大量同类或异类的传感器数据,需要将多源传感器信息进行有效融合,形成统一的战场态势。该阶段的关键在于将各传感器数据进行时空统一、格式统一,转换成系统可识别的传感器数据报告,再经融合分配和融合控制,进行分级式融合,生成更准确的目标分类信息、精确的目标信息和高级别的战场态势,为决策及任务规划提供支持。关键要素包含信息融合、实时交互、战场显示等。
1.2.4 任务规划阶段
针对多变的任务、威胁环境、集群成员损伤等情况,应进行实时任务调整和重规划。该阶段关键在于通过威胁的判断、目标优先权的排序及目标分配等任务的动态分配与调度,实现多机之间的任务分配的冲突消解,任务和成员能力的协同决策,制定高效合理的任务计划,以提高集群的任务完成率和生存能力。关键要素包含威胁判断、目标优先权排序、目标分配等。
1.2.5 对抗/突防/攻击阶段
在任务规划完成后,就要进行实施,以完成作战任务,这个阶段也是体现集群自主能力的重要方面。对于电子对抗,通过协同航线和干扰信号,可以干扰到对方雷达的整个覆盖区,使其短时间内无法正常工作,从而为后续作战部队打开空中走廊。对于突防与攻击,通过尽可能少损失来提高集群的整体生存能力,突破敌方的严密防空圈,到达任务区域,然后对目标发起协同攻击,可从多个攻击阵位、多个攻击角度对单个或多个目标进行火力齐射,既能提升目标的杀伤概率,又能增加攻击的突然性。关键要素包含武器种类、杀伤半径、任务成功率、战损率、平台数量等。
1.3 效能评估指标体系
对于航空集群系统对地作战为例,对各阶段的关键要素进行整合,基于系统能力进行评估指标体系构建,其中包括感知能力、通信能力、组队能力、策划能力、打击能力以及毁伤评估能力。
根据分层原理,可以初步划分为3 层。
第1 层:为混合编队协同对地攻击的最高层,是该系统的总体效能。
第2 层:作战能力,包括感知能力、通信能力、组队能力、策划能力、打击能力以及毁伤评估能力。
第3 层:从不同角度描述其上层子系统的能力。
航空集群作战效能评估指标体系如图2 所示。

图2 航空集群作战效能评估指标体系分支
2 航空集群作战效能涌现评估模型构建
2.1 基于“机群”作战效能模型
根据效能评估指标体系,采用AHP 层次分析法,首先建立“机群”对地作战能力E1的数学模型为:

式中,Ei1分别是EGZ1为感知能力;ETX1为通信能力;EZD1为组队能力;ECH1为策划能力;EDJ1为打击能力;EPG1为毁伤评估能力;θs为效能损失系数,该系数与环境干扰因素相关;ξi分别是ξ1~ξ6为各能力的影响因子。εi分别是ε1~ε6为各子系统效能所占的权重,该权重系数可由专家打分后进行转换得出。
2.2 基于“集群”作战效能涌现模型
对于航空集群,由于经过集群自组织机制与行为调控机制的有机耦合,以及集群空间构型对作战任务的适应性调整,使得整个群体产生了能力涌现。其中影响能力涌现的因素主要有:ZUZ 为自组织能力等级(0~10 级);XWT 为行为调控能力等级(0~10 级);SYX 为集群空间构型任务适应性综合等级(0~10 级)。对于这3 种能力等级,均是0 级能力最低、10 级能力最高。详细的等级划分见下页表1~表3。

表1 自组织能力等级划分
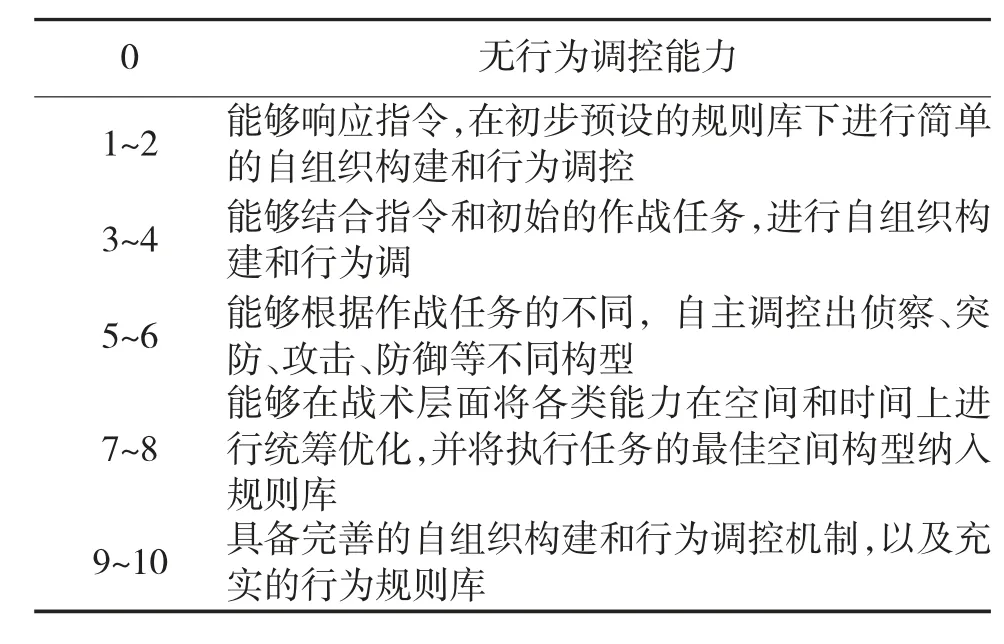
表2 行为调控能力等级划分
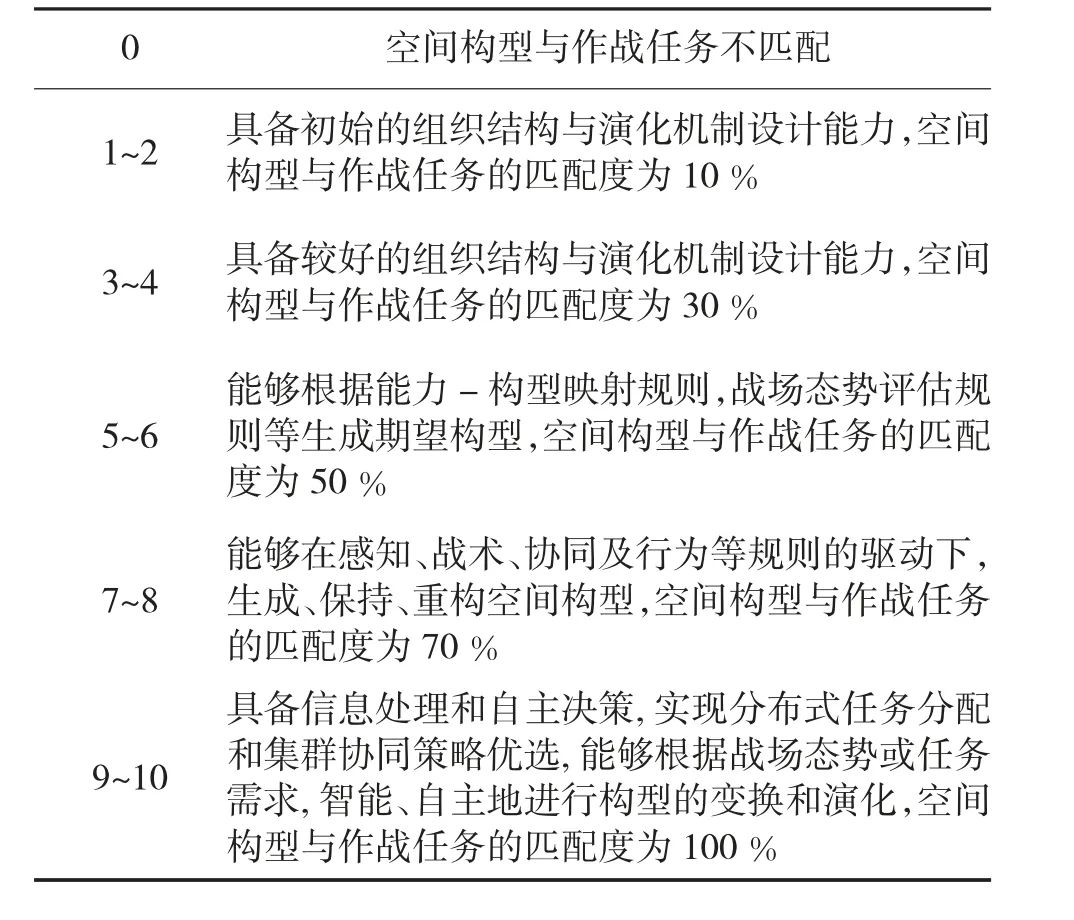
表3 集群空间构型任务适应性综合等级划分
结合上述因素,在机群作战能力E1的数学模型的基础上,建立“集群”对地作战能力E 的数学模型为:

式中,Ei分别是EGZ为集群感知能力;ETX为集群通信能力;EZD为集群组队能力;ECH为集群策划能力;EDJ为集群打击能力;EPG为集群毁伤评估能力。θs为效能损失系数,该系数与环境干扰因素相关;ξi分别是ξ1~ξ6为各能力的影响因子。εi分别是ε1~ε6为各子系统效能所占的权重。
通过指数对数法将“集群”的各分系统的能力Ei与“机群”中的各分系统的能力Ei1建立关系,其计算模型为:

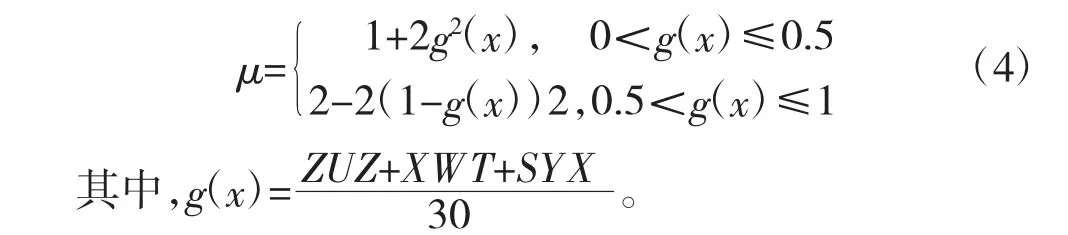
式中,ZUZ 为自组织能力等级;XWT 为行为调控能力等级;SYX 为集群空间构型任务适应性综合等级;μ(ZUZ,XWT,SYX)为自组织能力、行为调控能力以及集群空间构型任务适应性的增益函数,对于集群系统,μ≥1。其中,μ 为非线性增益函数,构造方法可参考模糊增强算法的构建方式,本文提出一种分段函数构建方法,供参考。
3 航空集群系统对地作战效能涌现分析
根据不同威胁环境下的典型作战场景,结合战场构成元素的相关性能,分解出影响作战效能评估的输入参数,如战场威胁等级、目标防御等级以及效能损失等,并以某型无人机和有人机协同作战为例,列举不同的架数分配方案,通过不同的排列组合可形成一系列的计算点,不同的计算点得出的结果可构成评估结果云。本文评估了在不同的威胁环境下3 种架数分配方案的效能,计算结果属于“结果云”中的一部分。其中,A 方案为1 架有人机+4架无人机;B 方案为2 架有人机+6 架无人机;A 方案为2 架有人机+8 架无人机。结合上述所有情况对不同威胁及分配方案进行效能评估,具体如表4所示。从表中可以看出,在相同的威胁环境下,无人-有人飞机的数量越多,自组织能力、行为调控能力、集群空间构型任务适应性综合等级越高,效能值越大,同时在相同的无人-有人飞机搭配方案下,战场威胁等级越高,效能值越小。

表4 不同威胁环境下的效能计算结果
从计算结果可以看出,在低、中、高3 种威胁环境下,以自组织能力等级、行为调控能力等级,以及集群空间构型任务适应性综合等级均以7 级为例时,航空集群的作战效能均高于航空机群的作战效能,即航空集群的能力出现了涌现。例如,在低威胁环境下,有人机与无人机的配比方案分别为A、B、C 3 种时,其相应的航空集群的作战效能相对于航空机群的作战效能均有所增加。在面对的敌方威胁不变的情况下,通过集群的作战模式来增强自身的作战效能,以获取更大概率的胜算。
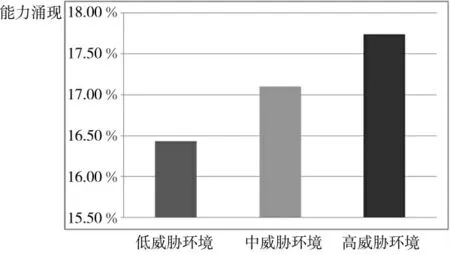
图3 不同威胁环境下的能力涌现
以某无人机和有人机为例,对在相同的威胁环境下的效能涌现取均值,低、中、高3 种威胁环境下分别为16.43%、17.10%、17.73%,在其他计算输入条件不变的情况下,环境威胁越高,航空集群作战能力的涌现效果越明显,即出现了“敌强我越强”的现象。航空集群充分利用多平台在空间上能够形成快速、多变进攻态势的特点来弥补单机作战能力弱的缺点,达到以弱胜强的目标。
通过选取不同威胁环境下,有人机与无人机的分配方案为A,其他参数保持不变时,通过改变自组织能力等级、行为调控能力等级以及集群空间构型任务适应性综合等级,绘制了不同等级下的能力涌现图。由图4 中可知,随着等级的不断提高,能力的涌现不断增加,但是增加的幅度逐渐减缓,即出现“能力增长饱和”的现象,因此,在满足作战需求的条件下,不必花费过多的技术、精力和成本将作战装备的等级提到最高。
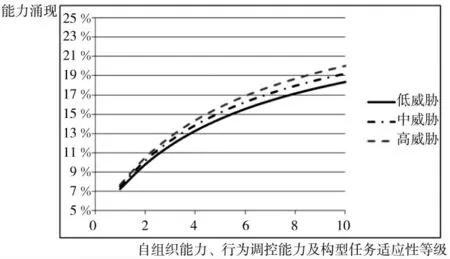
图4 不同等级下的能力涌现
4 结论
在航空集群系统网状指标体系中的对地作战效能评估指标体系分支的基础上,结合航空集群系统作战的自组织机制、行为调控机制,以及集群空间构型对作战任务的适应性调整等特点,构建了集群作战效能涌现评估方法,通过评估某型无人机与有人机的协同作战效能,总结了不同威胁、不同机型搭配、不同的能力等级下的作战效能涌现的特点。后期可构建集群作战仿真系统,并根据相关试验数据、演习打靶数据等进行数据分析回灌,在修正仿真模型后进行新一轮仿真评估迭代。随着该理论的不断完善,可为未来飞行器的设计、集群作战的战术战法、集群智能等奠定研究基础。
猜你喜欢
江西师范大学学报(自然科学版)(2022年3期)2022-10-18
农业工程学报(2022年11期)2022-08-22
军民两用技术与产品(2022年1期)2022-06-01
民族文汇(2022年13期)2022-05-07
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年9期)2021-11-02
水上消防(2021年3期)2021-08-21
汽车工程学报(2021年3期)2021-06-16
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
知识就是力量(2017年2期)2017-01-21
