基于网络RTK的离心式无人机变量施药可行性初探
2021-08-04 05:48漆海霞周靖康李承杰陈鹏超黄桂珍
农业工程学报 2021年9期
漆海霞,周靖康,李承杰,陈鹏超,梁 钰,黄桂珍,邹 军
(1. 华南农业大学工程学院,广州 510642;2. 国家精准农业航空施药技术国际联合研究中心,广州 510642; 3. 华南农业大学电子工程学院,广州 510642;4. 岭南现代农业科学与技术广东省实验室,广州 510642)
0 引言
中国的农田覆盖面积辽阔,可达1.5亿hm2,但病虫害依然是国内农业发展所面临的一个重大问题。中国在病虫害防治中普遍采用农药的“粗放式”管理,据统计中国单位面积的农药使用量是世界平均水平的2.5倍,每年防治面积达到4亿~5亿hm2[1-2],过量的使用农药不仅造成了农药利用率低,还产生大量的农药残余,造成严重的水污染,使农产品品质下降、生态系统失衡,甚至严重威胁食品安全[3],因此依照实际病虫害情况,使用精准变量施药的方式,可以在保证施药效果的情况下,有效减少农药使用,从而达到农药减施增效的目的。
近年来,中国航空施药产业发展迅速,与传统的人工施药和地面机械施药方式相比,航空施药可以在丘陵和山地等人工和地面大型机械难以作业的区域进行喷施作业,同时能快速应对大规模的突发性病虫害,有效缓解农村劳动力不足,减少作业人员与农药的直接接触,具有其他农业机械不可替代的优势[4-6]。针对不同的喷施要求,与不同的喷施作业环境,为了在达到最佳防治效果的同时,又不造成农药浪费,对无人机施药的准确性和作业效率提出了较高要求[7-11]。在植保作业过程中,无人机施药量根据实时作业位置和作业处方图,实时调节施药流量和施药粒径,在保证施药效果的条件下,实现按需变量施药,能有效减少重喷漏喷等现象。实时作业处方位置的获取依赖于GPS位置信息的获取,但是其精度不足以满足在实际农业生产应用中的需求,因此为获取更高的精度而使用了实时差分技术(Real-Time Kinematic, RTK)[12]。国内外学者对于变量施药技术与差分定位技术有很多研究,Thomas等[13]使用脉冲宽度调制(Pulse Width Modulation,PWM)技术喷施农药,使用了压力式喷头,验证了PWM喷雾器与适当的压力组合能产生最佳的除草剂滴数,并将数据储存在数据库用于精确农业的实践。Perez-Ruiz等[14]将使用安装了GPS-RTK装置的农机进行农作物地理空间制图,实际地图误差为2 cm,95%以上的植株都长在生长植株半径为5.58 cm的圆内。Tewari等[15]研究了基于图像的可变速率的喷洒系统,系统使用摄像机获取图像,使用电脑进行图像数据处理,并通过微处理器控制输出信号,从而调节水泵输出,使得化学药剂的使用量至少减少了33%。罗锡文等[16]将基于RTK-GPS的自动导航系统用在东方红X-804拖拉机上,使用PID作为模型控制器,在行驶速度为0.8 m/s时,平均跟踪误差小于0.03 m。王大帅等[17]设计了一种基于ARM架构的植保无人机动态变量施药系统,该系统能实现施药流量与飞行速度的自匹配,实际流量与目标流量的偏差值为1.9%,喷幅约5 m。徐颖章[18]使用了RTK的方式改善GPS定位精度,且RTK程序能够在硬件内存有限的情况下正常运行,并通过试验分析,能实现1 cm内级别的相对定位精度。张瑞瑞等[19]设计了一种有人直升机变量施药系统,以STM32为系统主控器,完成速度与流量的采集,在飞行速度小于160 km/h时,误差在10%以内。孙文峰等[20]设计了一种基于神经网络整定的PID控制变量施药系统,该系统使用压力式喷头进行试验,通过神经网络PID控制算法修正控制参数,施药结果表明在不同速度下,雾滴沉积的标准差均小于1.4个/cm2,系统平均调节时间0.72 s。目前国内外学者对于网络RTK技术和离心喷头的研究应用较少,网络RTK技术的优点是无需假设基准站,而是使用网络设备从数据处理中心的基准站网获取修正信息,基准站网甚至能在上百公里以外,突破了基站距离的限制,也减轻了基准站的架设费用[21-24];与压力式喷雾不同,离心喷头的优点是液滴在离心力的作用下由转盘甩出,雾滴进入喷头时一般由重力作用流出,所以对水泵的压力的需求不高,同时由于雾滴流出喷嘴的过程互不干涉,因此流量和粒径可以独立控制[25-28]。
为提高无人机田间作业精度和作业效率,验证网络RTK技术在无人机施药上的可能性,本文设计了一种基于网络RTK的离心式无人机变量施药系统,并通过田间试验,分析处方交界区域施药量及粒径的变化情况,并验证施药装置的精度,对网络RTK技术以及离心式变量施药技术的改良提供方向和参考。
1 系统组成
1.1 系统总体方案设计
系统的组成如图1所示,包含处方图生成、机载硬件系统数据及控制信号处理和监控平台作业数据显示,首先由机载多光谱相机、地物波谱仪、手持式GPS仪获取农田农情信息分布,在上位电脑中使用ArcGIS软件生成作业处方图,然后通过机载硬件系统接收并处理传感器数据、根据处方信息执行具体施药指令,最后远程监控平台实时监控机载系统的运行状况,完成无人机变量施药任务。
1.2 处方图生成
本研究使用无人机搭载多光谱相机以及地物波谱仪获取作物农情信息并转化为处方信息,使用手持GPS仪获取高精度的地面经纬度信息,根据农田位置的分布构建地块的shapefile文件,把处理后的处方信息录入到属性表中,同时进行网格化处理,并将处方图在符号化(Symbology)选项中按照处方信息值的大小进行显示。在进行试验前,将shapefile格式的文件导出为CSV文件,将文件中的位置数据、处方数据输入到变量施药系统主板中,施药过程中则根据实时GPS位置搜寻作业装置所在网格,并将网格中对应的处方数据进行提取,再控制变量施药装置执行。
1.3 机载系统硬件及软件设计
变量施药系统的硬件由变量施药系统主板、变量执行器、无线数传模块、GPS网络差分模块组成。硬件系统组成如图2所示。
该硬件系统搭载在植保无人机上,以施药系统主板为核心,通过网络RTK技术获取高精度的GPS定位信息,并调用出处方决策信息,按照处方信息及GPS数据调节变量施药执行装置参数,同时采用无线数传将无人机作业信息传输到远程监控平台中。
1.3.1 施药系统控制主板
本装置以STM32F103VCT6微处理器为核心,设计并制作了施药系统控制主板,完成高精度的位置信息采集、变量施药执行机构控制信号的输出、处方信息的解析、施药系统和上位机的信息交换等任务。板卡内部电路包含最小系统电路、电源电路、变量执行装置驱动电路和串口驱动电路等。
1.3.2 GPS网络差分模块
网络差分模块包括高精度的GPS板卡和DTU模块,GPS板卡使用上海司南导航生产的K726板卡,该板卡的输入电压为3.3~5 V,使用双天线输入,支持BDS B1/B2,GPS L1/L2,GLONASS L1/L2三系统双频信号高精度测姿功能,RTK解算后的精度能达到1 cm,支持常用的数据格式;DTU模块使用的是厦门四信通讯生产的F2A16-DK模块,支持全网频段,能实现上网功能。本研究采用千寻位置提供的网络RTK差分服务,可以提供7×24 h的水平精度2 cm,高程精度为4 cm的实时定位服务。
网络差分具体实现的方式是通过司南导航K726板卡实现GPS原始数据的收集,在采集完GPS初始GPGGA数据后,板卡通过串口将该数据上传至厦门四信通讯F2A16-DK模块,该模块将通过拨号功能使用千寻位置提供的FindCM服务将GPGGA数据进行上传获取差分信息,并将差分数据通过串口传至GPS模块,最后GPS模块将解算后的GPGGA(卫星定位信息)信息和GPVTG(地面速度信息)信息通过另一串口上传至施药系统主板,施药系统主板提取GPGGA信息中的经纬度位置信息、定位信息状态信息和海拔高度信息,提取GPVTG信息中的地面速度信息,为保证数据获取的实时性和解析的准确性,在经过测试后将数据传输速度定为每0.2 s传输一次导航信息。
1.3.3 变量施药执行器
在本文中变量施药执行器由离心喷头和蠕动泵组成,其中通过控制离心喷头的转速来控制雾滴粒径,通过控制蠕动泵的转速来控制变量系统的施药量。
变量执行器中的喷头采用的是极飞科技生产的P20系列离心喷头和蠕动泵。两种设备控制方案相似,都是通过调节STM32处理器的I/O口输出的PWM信号,并通过的反相施密特触发器和场效应管将输出信号信号放大,从而控制离心喷头的转速和蠕动泵的流量。单路水泵/喷头控制电路图如图3所示。本设计的施药量和施药粒径的变化是通过蠕动泵和离心喷头的输出功率来控制的,将PWM波的输出频率固定为1kHZ,在试验过程中通过调整占空比的大小来控制蠕动泵和离心喷头输出功率,调节范围为20%~80%。
1.3.4 无线数传模块
无线数传采用的是DL-43模块,DL-43模块内部采用CC2592芯片和CC2530F256芯片,共16个信道,使用IPEX天线,有效传输距离可达1 000 m,该模块能通过AT指令或者按键修改控制参数,具有低功耗、高性能等特点。
机载硬件系统与监控平台通过无线数传模块配置为点对点传输模式,实现监控平台与硬件系统的通讯,并确保上位机具有唯一控制权,在DL-43模块运行过程中,机载硬件向DL-43模块A端发送串口数据包,监控平台通过调用DL-43模块B端实时捕获串口数据,解析后显示到监控平台上。串口数据包如表1所示,各个数据之间由逗号隔开。
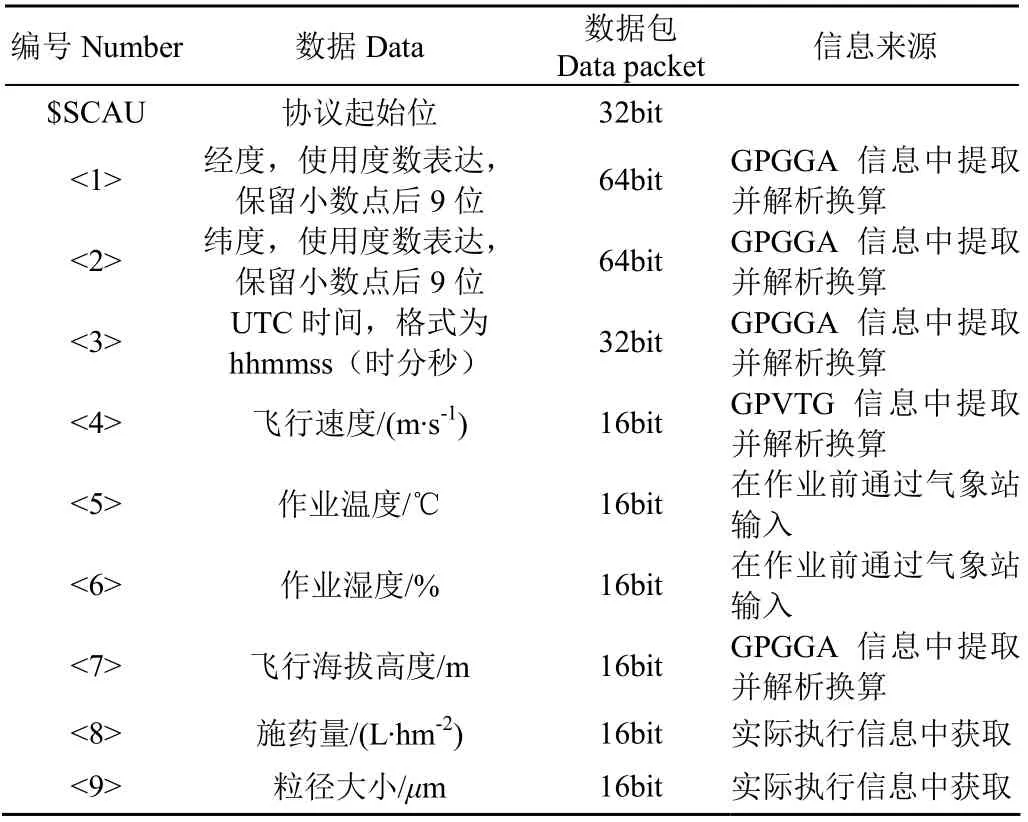
表1 串口数据包 Table 1 Serial port data packet
1.3.5 系统软件设计
变量控制系统的硬件程序是在STM32F1平台下开发设计的,具体的程序流程如图4所示。在系统启动时,先初始化各硬件串口等配置,读取处方信息,调用GPS子函数读取GPGGA数据并处理,判断是否进入差分,并获取准确的经纬度信息,检索出该位置的处方信息,将处方所给的施药量转化为PWM的占空比大小,通过调节PWM的占空比控制蠕动泵输出不同的施药量;将处方所给的目标粒径大小转化为目标转速大小,再将目标转速大小转化为PWM的占空比大小,通过调节PWM的占空比来控制离心喷头的转速。后通过无线数传传至上位机,在监控平台中完成数据的可视化处理,并将试验数据保存。
本文是根据处方信息实现变量施药,因此在作业过程中,将根据提取的无人机作业位置信息进行网格识别。因此在获得施药系统经纬度信息后,采用坐标旋转和行列扫描的方式识别作业位置网格标号识别无人机作业位置的网格标记。其中坐标旋转公式为[29-30]。
式中x',y'为旋转后的经纬度, (°);x,y为GPS网络差分模块获取的原始GPS经纬度,(°);α为旋转前后坐标系间的夹角,(°)。
经纬度坐标值转换结束后,针对转换后的无人机作业位置坐标(x',y'),首先对无人机所在位置的经度进行行扫描,当xi≤x'≤x(i+1)时,锁定作业位置行号i(0<i≤行最大值);后进行列扫描,当yj≤y'≤y(j+1)时,锁定作业位置列号j(0<j≤列最大值)。在检索到横坐标和纵坐标的行号和列号后,通过读取网络标号即可查询到对应的处方施药决策信息。
1.4 监控平台软件
监控平台接收机载硬件系统发送的数据包,通过提取数据包中指定数据来解析作业系统当前作业状态。系统所设计的采集监控平台,用于显示无人机的实时作业状态,通过调用串口数据的方式,读取施药系统控制主板上传的串口数据包,串口数据包内容如表1所示,将数据包解析后将数据显示在主界面中,并通过web控件 连接百度地图的API,将经纬度信息进行实时解析并绘制作业轨迹。
2 试验材料与方法
2.1 试验材料与场地
试验于广东省广州市华南农业大学增城校区教学科研基地进行。试验地块的长度为90 m,宽度为5 m,该地块以行距为0.6 m,株距为0.4 m种植3种不同品种的玉米,按照长30 m,宽5 m划分成3个处方区域,如图5a所示。3个不同的处方区域为a区,b区和c区,其中a区和b区的交界位置为处方交界A区域,简称A区,b区和c区的交界区域为处方交界B区域,简称B区。其中L3和L10排为两个处方交界线,即变量施药位置。每个区域的设定的不同施药量和目标粒径,形成不同的处方信息,采用3 cm×8 cm的水敏纸在处方交界地带布置采样点(图5b),共布置14×7个采样点。其中L1~L5,L8~L12的按照玉米的行距大小设置间距为0.6 m,L5与L6、L12与L13的排间间距为1 m(含垄沟宽度),L0、L7、L14在所处处方区域的中心,R1-R7综合株距以及无人机喷幅设计列间间距为0.8 m。
试验采用型号为大疆MG-1P的八旋翼无人机,并挂载自研变量施药系统,同时无人机的作业信息将会上传至监控平台中。在试验过程中控制无人机距离作物2 m的高度进行施药作业,以2 m/s的速度进行喷雾试验,通过水敏纸来测量在无人机处方交界地带A区和B区无人机施药量和施药粒径变化情况。
2.2 作业参数设计
此次试验主要是测试课题开发的无人机变量施药系统实际工作情况,试验通过改变处方区域的施药量、目标粒径大小来形成不同的处方信息进行变量施药试验。作业参数如表2所示,其中环境参数采用的是深圳市虹源博科技有限公司生产的HberW6-3便携式微型自动气象站进行测量所得。试验时间为2021年1月29日,实验时平均气温约为20 ℃,风向为偏北风。
如表2所示,试验组G1、G2调节的是施药量大小,G3、G4、G5调节的是粒径大小,G6为对照组。其中,本研究主要通过分析DV0.5来研究作业系统施药粒径变化情况,DV0.5的含义是按照雾滴中值粒径从小到大进行排序,位于50%位置的雾滴中径的值,μm。

表2 试验参数表 Table 2 Test parameters table
2.3 实际的采集及处理
在采集完成每一组数据后,待雾滴干燥后,按照编号收集放入密封袋中,等施药结束后带回实验室进行处理。将采集的水敏纸逐一用试验室的hp4678扫描仪进行扫描,图像采集后通过DepositScan对每个采样区域的水敏纸进行分析,可以获得每一个采样点的沉积量、覆盖密度和粒径大小。其中雾滴的沉积量是通过雾滴的体积来计算的,雾滴体积的计算公式为
式中V为单个雾滴的体积,μm3;d为雾滴的直径,μm。而单位面积内的雾滴沉积量则为采样面积内的雾滴体积累加[31]。
本研究的喷雾均匀性由沉积性的变异系数表示,由各个采样区域的沉积量计算得出,其计算公式为
式中C为变异系数,%;S为雾滴沉积量标准差,μL/cm2;Xi为各采集点沉积量,μL/cm2;为采用区域雾滴平均沉积量,μL/cm2;n为采样区域有效采集点个数。
3 结果与分析
3.1 不同占空比对流量和粒径的影响
为了分析不同占空比下蠕动泵流量以及离心喷头转盘转速的关系,在进行施药试验之前使用量杯以及转速仪对施药执行机构进行标定,试验所得的部分占空比与施药量以及喷头转速的关系如表3所示。
通过表3中的数值可以得出不同占空比下水泵和喷头的拟合函数:
式中y1为蠕动泵流量,mL/min;y2为离心喷头转速,r/min;p为占空比,%;为拟合函数的拟合程度。
由于离心喷头的转速会影响施药粒径的大小,因此在试验室内模拟无人机作业高度、作业风场使用水敏纸测试了喷头转速与粒径的关系,部分结果如表4所示。
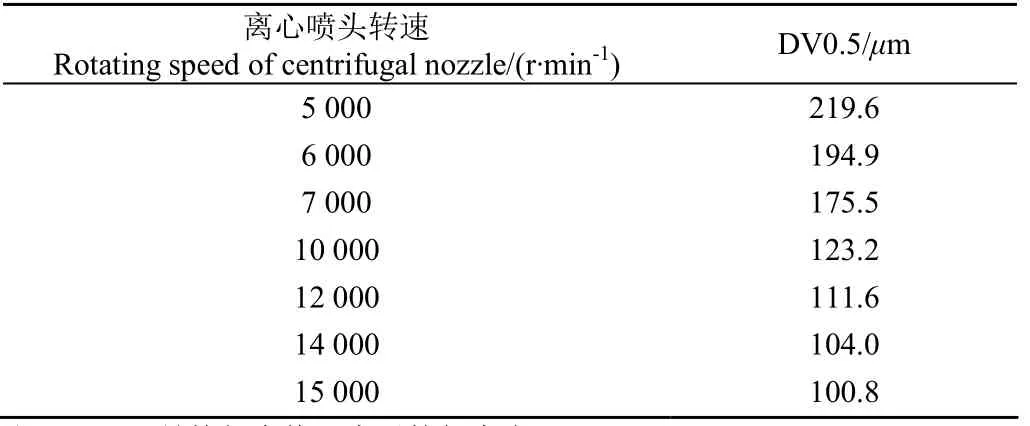
表4 转速与粒径的关系 Table 4 Relationship between rotating speed and particle size
通过表4可得不同离心喷头转速下施药粒径的拟合函数:
式中y为施药粒径大小,μm;N为离心喷头转速,r/min;R为拟合函数拟合程度。
本文设计的施药装置在作业时,将读取处方中目标施药量和目标粒径后通过式(4)和式(5)转化为不同的PWM波占空比,从而执行施药决策。
3.2 施药精度分析
通过对照试验组G6来确定施药系统的施药精度,参照《农业航空作业质量技术》中的指标,超低容量的农药喷洒时雾滴覆盖密度应大于10个/cm2,如表5所示,试验中雾滴覆盖密度大于10个/cm2的采集点为有效采集点,由图5b可知垂直于飞行方向的采集点R1~R7的间距为0.8 m,考虑到作业无人机在L5、L6、L9、L10、L11的有效覆盖点的数量都在4个及以上,且L7排采集点的边缘位置R2和R4,以及L8排的采集点的边缘位置R4和R6的雾滴覆盖密度都大于40个/cm2,因此L7排与L8排可能是由于采集时下旋风场过大,且水敏纸布置方式不佳,导致水敏纸向下弯曲程度过大,同时采集边缘位置本身雾滴较少,导致采集雾滴数量较少而出现了误差。综上,本次试验无人机的列间有效采集点为4~5个,有效喷幅为2.4~3.2 m。
根据表2中G6组的处方信息可知施药装置在由a区进入b 区后开始施药,进入c区后停止施药,由图5a可知预设变量施药点分别在L3和L10,由表5知在A区在L3出现有效采集点,在L3、L4有效采集点的覆盖密度为10~32个/cm2,考虑到药液在离心喷头作用下会沿着转盘边缘呈螺旋线状喷出的特性,可以得出施药装置在L3与L4之间开始执行施药,且雾滴的覆盖密度随着系统的稳定而逐渐增加;在B区域在L8、L9、L10的有效采集点的覆盖密度为13~86个/cm2,在L11的有效采集点的覆盖密度为10~43个/cm2,覆盖密度大小呈现较明显下降趋势,且L12只在1个采集点大于10个/cm2,因此施药系统在L10与L11之间停止施药。由于本研究设计变量施药位置在L3与L10,作业速度为2 m/s,L1~L5、L8~L12列间间距为0.6 m,由此判断施药系统的精度在0.6 m以内,处方解析与执行时间小于0.3 s。
3.3 雾滴沉积量分布
在不同有效采集点采集到的施药沉积量以及雾滴均匀性如表6所示,其中由于L0、L7、L14采集点位于当前处方区域中心位置,距离前后处方变换区域有一定距离,施药状态已稳定,故用L0、L7、L14检测施药系统在处方区域的实际施药情况。在G1组试验中L0的平均沉积量为0.073 6μL/cm2,略高于预设值0.07μL/cm2,L7的平均沉积量为 0.077 6μL/cm2,略低于预设值0.08μL/cm2,L14的平均沉积量为0.085 8μL/cm2,略微高于预设值0.085μL/cm2,因此在该G1组试验过程中变量施药系统能按照处方值进行变量施药作业,同理G2组也满足条件,即本文设计的变量施药系统能正常执行施药决策。
由表6可知,在A区和B区的L1~L5、L8~L12区域的施药量出现明显的波动,因此存在一个不稳定区域,施药与前后处方区域的预设值相差较大,这是主要是由两部分原因组成:施药系统在进入处方变量点L3、L10后,目标施药量大小发生了变化,施药系统无法立即进入稳定状态;由于离心喷头的施药特性,在作业时离心喷头能同时影响前后几列采集点的雾滴沉积情况,因此造成部分区域的沉积效果出现较大震荡。
在G1组试验中,L6的平均沉积量为0.075μL/cm2,比L7的平均沉积量少0.002 6μL/cm2,L13的平均沉积量为0.084 2μL/cm2,比L14的平均沉积量少0.001 6μL/cm2;在G2组试验中,L6平均沉积量为0.090 38μL/cm2,比L7的平均沉积量少0.002 28μL/cm2,在L13平均沉积量为0.109 4μL/cm2,比L14的平均沉积量多0.001μL/cm2,均相差不大,因此可以判断无人机在L6、L13的位置时施药量的增加已经趋于稳定,结合采样点的布置方法图5b可知L6、L13位置距离变量施药位置L3、L10的距离是2.2 m,由此判断本文研究的变量施药系统的施药量能在2.2 m内趋向稳定。
3.4 雾滴粒径大小
分析G3、G4、G5组的试验数据,验证试验装置是否能根据处方信息实现变粒径施药。如表7所示为G3、G4、G5组试验处于各处方栅格中心L0、L7、L14的DV0.5情况,各处方区域的粒径大小均随着目标值的减少而减少,与预设处方值相符,说明本课题组研制的变量施药系统能实现变粒径的变量施药。同时实际平均粒径和目标粒径的偏差值会随着目标粒径大小的减小而增加,这是由于雾滴的粒径大小由离心喷头的转速来控制的,在目标粒径足够小的情况下,受气象等外界因素的影响,实际的粒径变化并不会随着转速的增加呈线性变化,导致偏差增加。
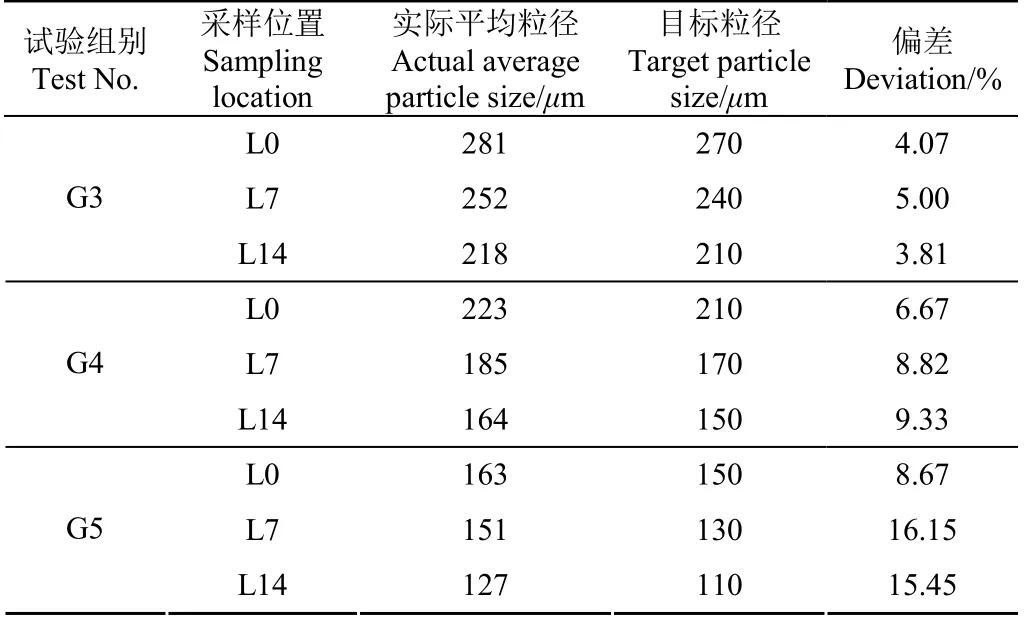
表7 各采样位置粒径分析 Table 7 Particle size analysis of each sampling location
如图6所示为G3、G4、G5组不同采集位置的平均DV0.5大小,其中L3、L10为处方变换点,雾滴在经过变换点后,在L4~L6和L11~L13采样位置雾滴粒径大小都有不同程度的波动,相较与L7和L14采样位置粒径普遍偏大,这种现象在目标粒径较大的组别如G3组和G4组较为明显,对于目标粒径较小的G5组影响较小,因此在转速相对较小时,施药系统喷头转速的增加会在处方交界区域产生较为明显的震荡,粒径大小呈现波动下降的趋势,而在转速较大时,粒径大小能以更平滑的方式趋于稳定。
4 结论与展望
本文以STM32F103为平台设计并搭建了基于网络RTK的变量施药硬件及软件,并通过田间试验得到以下结论:
1)本文设计了一种基于网络RTK的变量施药装置,该装置能通过GPS模块和DTU模块实现网络RTK技术,通过ArcGIS软件和农情信息生成处方图,通过位置匹配检索无人机处方信息,并根据处方信息执行施药决策,并通过试验采集了处方区域的雾滴沉积数据,验证了该装置能执行变量施药任务;
2)在使用离心喷头进行变量施药时,由于施药系统的稳定性和离心喷头的施药特性,处方交界区域的施药沉积会有较大的波动值,无法立即达到稳定状态,因此在使用离心喷头进行变量施药时应该考虑不稳定区域的宽度。
3)在使用离心喷头进行变粒径试验时,实际粒径会随目标粒径减小,但是粒径大小的变化并未呈线性变化,粒径越小偏差值越大,这是由于在粒径过小时,更容易受到作业环境的影响;同时离心喷头在较高转速下进行变量作业时,处方交界区域的粒径变化较平缓;
本文将网络RTK技术与无人机变量施药技术结合,验证了网络RTK技术在田间运用的可能性,并通过试验研究了离心喷头在处方交界位置的药液及粒径分布情况,该变量施药装置的变量精度在0.6 m以内,执行与解析时间约为0.3 s,能在2.2 m以内达到稳定状态,这与测试方法、网络速率、作业速度、系统执行和解析时间都有较大关系。在下一步的研究中;将通过其他联网方式进行网络差分运算,避免在田间因为DTU网络连接信号较差而出现的误差;同时根据作业速度、系统执行与解析时间等计算出施药装置的提前量,并通过提前量的设置,提高施药的准确性。
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
汽车工程师(2021年12期)2022-01-18
中国食用菌(2021年10期)2021-11-04
陶瓷学报(2021年4期)2021-10-14
陶瓷学报(2021年4期)2021-10-14
昆钢科技(2021年6期)2021-03-09
汽车零部件(2020年9期)2020-09-27
文苑(2020年6期)2020-06-22
恋爱婚姻家庭·养生版(2018年10期)2018-10-26
南方文学(2016年4期)2016-06-12