高地隙施药机自动驾驶系统研制与试验
2021-08-04 05:46安家豪王艳鑫王应宽金诚谦
农业工程学报 2021年9期
印 祥,安家豪,王艳鑫,王应宽,2,金诚谦,3※
(1. 山东理工大学农业工程与食品科学学院,淄博 255000;2. 农业农村部规划设计研究院,北京 100125; 3. 农业农村部南京农业机械化研究所,南京 210000)
0 引言
随着卫星定位、自动导航、机电液融合控制等技术在农业中的深入应用,农业机械的自动化和智能化水平不断提高。具备自动导航和自动驾驶的智能农机装备已经开始应用于农业生产,在保证田间作业质量的同时减轻了工作人员劳动强度,代表着未来农业的发展方向[1-3]。
农业机械在田间行驶的同时需要完成既定的作业任务,即实现行走底盘和作业机构的一体化控制。在自动驾驶作业过程中,需要以机具路径跟踪为研究对象进行实时定位与导航控制[4-5]。黎永键等[6-10]以实时动态全球导航卫星系统(Real-Time Kinematic Global Navigation Satellite System, RTK-GNSS)和惯性测量单元(Inertial Measurement Unit, IMU)作为导航传感器开发具备自动行走与机具控制的拖拉机、高地隙施药机、联合收获机、插秧机。
高地隙施药机作为一种高效的田间管理农业机械,主要用于液态农药和化肥的喷施。其自动驾驶系统主要包括导航控制系统、遥控操作系统、行走控制系统和喷药控制系统等4个子系统。在导航控制系统研究方面,许多研究人员针对轮式农田车辆的路径跟踪建立了车辆运动数学模型、导航误差计算方法和跟踪控制算法,设计了转向控制器和导航控制器,在水平路面上的直线路径跟踪误差小于5 cm,田间试验路径跟踪误差均小于10 cm[11-15]。自动驾驶高地隙施药机的行走控制功能主要包括自动转向、速度自动调节和油门自动控制。杨洋等[16-18]采用多种型式的电机及传动机构替代原车方向盘,通过控制电机的旋转速度和旋转方向实现转向轮的角度偏转。在喷药控制方面,蒋焕煜等[19-21]采用基于机器行驶速度或作物空间变异的精量喷雾控制方法,调节电控流量阀的出口开度或脉冲宽度调制(Pulse Width Modulation, PWM)喷头的占空比以达到施药量的自动控制。
从以上分析可以看出,在农业机械自动导航、电动自动转向、精量施药等方面已经具备较为成熟的技术和产品,其中的各个产品均具备独立的操作系统和通信协议。对于一个完整的自动驾驶作业机组,要实现自主行走、精量作业等功能的集成控制,打破各个子系统间的软硬件技术壁垒,就必须解决操控机构自动化及软硬件标准化的问题。在高地隙施药机的自动驾驶系统研究方面,需要考虑上述各个子系统的融合控制、自动导航和遥控操作2种模式间的切换、各子系统间的数据交换以及整机性能的优化。
为提高田间施药的作业效率和质量、有效应对劳动人员农药中毒的潜在风险,本研究以高地隙施药机自动驾驶为研究对象,开展以自主行走与执行机构自动控制为核心的多系统融合控制研究。基于自主研发的电动自动转向系统、自动导航系统、油门调节器和静液压传动(Hydro-Static Transmission, HST)调节器,建立适用于高地隙施药机的自动控制策略、倾斜补偿方法、路径规划方法和喷雾控制方法,实现高地隙施药机的自动驾驶。
1 高地隙施药自动驾驶系统组成
自动驾驶高地隙施药系统以山东华盛中天机械集团股份有限公司的3WP-500G喷杆喷雾机为平台,由行走控制系统、喷雾控制系统、导航控制系统、遥控处理模块、自动驾驶地面站组成,如图1所示。其中,喷杆喷雾机的性能参数如表1所示。导航控制系统和遥控处理模块同时接收自动驾驶地面站的操控信号,将控制指令发布至CAN总线,行走控制系统和喷雾控制系统接收并执行CAN总线指令。
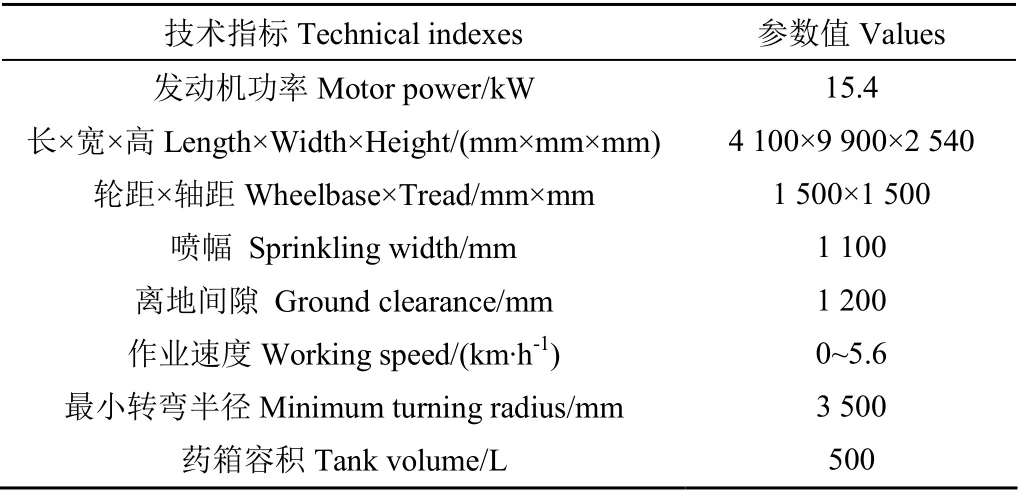
表1 华盛3WP-500G喷杆喷雾机主要技术指标 Table 1 Main technical index of Huasheng 3WP-500G sprayer
高地隙施药机自动驾驶系统所使用的平台具备全液压助力转向器、HST驱动系统、拉线式的无级变速器、油门调节器和制动装置,其三段喷杆的升降和伸缩均采用电磁换向阀控制,液泵输入轴通过电磁离合器与发动机输出轴联接。喷雾控制系统采用宁波市力成农用喷雾技术有限公司的三段式喷雾阀组,能够根据行驶车速实时调节流量阀的开口大小以保证施药量的均匀一致,如图2所示。
导航控制系统采用基于天宝定位板卡BD982和RTX差分服务的双天线定位定向接收机和VectorNav的惯性测量单元VN100作为导航传感器。导航控制器由山东理工大学自主研发[15],用以接收位置和姿态信息、运行数据处理和导航算法,并向行走控制系统和喷雾控制系统发送指令数据。
自动驾驶地面站通过收发电台与导航控制系统、遥控处理模块进行数据传输,其导航操控终端与导航控制系统远程连接,进行参数设置、路径规划、过程监控等导航操作。遥控器与遥控接收机无线连接,接收机的输出信号由信号预处理器负责转换并发布至CAN总线上。
根据高地隙施药机的行走操作机构、喷雾阀组的动作原理、自动驾驶系统结构及功能,本研究在设计自动操控机构的基础上制定了CAN总线通信控制协议,并针对高地隙施药机自动导航需求提出基于倾斜补偿的定位误差校正方法、适用于宽幅作业的路径规划方法以及相对安装位置自动标定方法。
2 高地隙施药机的控制系统设计
高地隙施药机的自动控制包括行走控制和喷雾控制两部分。在行走控制方面,因变速、油门、制动等机构均采用拉线式,在此以自动油门装置设计为例介绍其结构和工作原理。自动转向装置采用低成本的普通直流无刷电机,进行转向控制器设计。
2.1 自动油门装置
自动油门装置用于实时接收操作指令,根据指令数据调节油门大小。薛金林等[22]针对拖拉机油门踏板的动作过程设计了基于电动推杆的油门调节装置,用编码器检测并反馈油门开度。本研究中的高地隙施药机采用拉线式油门通过操作手柄调节其大小,如图3所示。
自动油门装置由油门电子控制单元(Electronic Control Unit, ECU)、WDD35D旋转电位计、减速电机、拉线轮组成,主要工作部件的性能参数如表2所示。
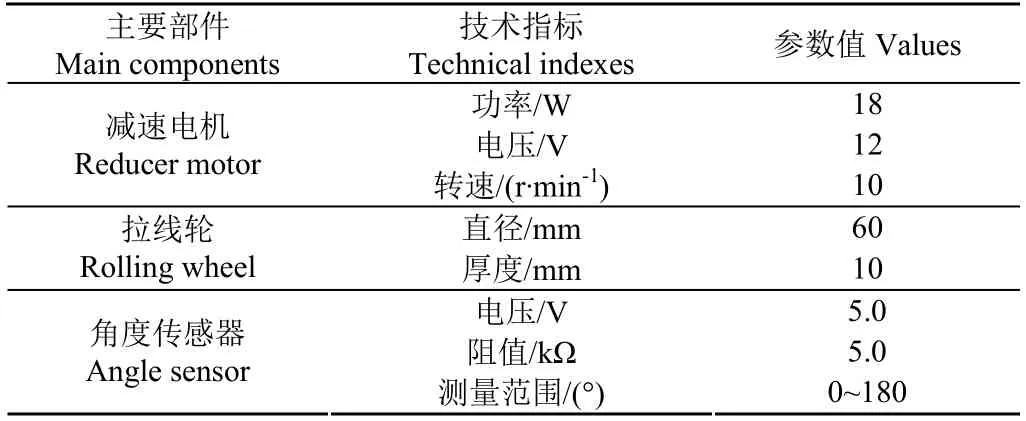
表2 自动油门装置主要部件参数 Table 2 Values of main components of automatic throttle mechanism
油门拉线的一端固定并绕在拉线轮上,拉线轮在减速电机带动下转动以改变油门大小。旋转电位计的输入轴随拉线轮转动以测量拉线轮的旋转位置。油门ECU以PIC18F258处理器为核心,由PCA82C250提供CAN总线物理接口,由4个CMOS功率管的通断组合控制电机的正反转,其接线原理如图4所示。
当C0高电平、C1低电平时,S1和S4导通,减速电机正转;当C0低电平、C1高电平时,S2和S3导通,减速电机反转。油门ECU通过A/D转换端口A0实时读取电位计反馈的数值,将此数值与CAN总线上的油门指令进行比较,通过端口C0、C1的高底电平控制MOS管开关S1、S2、S3、S4的通断,使减速电机带动拉线轮旋转至期望位置。
自动变速装置通过拉线调节静液压传动(Hydro-Static Transmission,HST)转臂的位置,而自动制动装置通过拉线压紧制动器的定盘和动盘。除拉线行程不同外,其结构和工作过程均与自动油门装置相同。在实际安装使用时,需根据拉线的极限位置确定拉线轮的旋转角度范围。
2.2 自动转向装置
自动转向系统根据转向指令将导向轮旋转至期望角度。杨洋等[16,23]采用直流电机带动全液压助力转向器的方式实现了高速插秧机等农业机械的自动转向,针对电机工作原理、控制方式和通信协议开发了转向控制器。其系统的工作性能、输出扭矩和集成应用受限于厂家提供的电机结构和通信协议,无法满足自动驾驶高地隙施药机对转向装置兼容性的功能需求。
本文开发的自动转向装置由转向电机、转向控制器、角度传感器组成。转向电机由12V、100W的直流无刷电机和速比为40的减速器组成,其输出扭矩和转速的额定值分别为10 N·m和80 r/min,如图5所示。转向电机为空心轴输出,输出轴的下端与液压转向器联接,上端与方向盘联接以便于观察转向机构的动作。角度传感器用于测量转向轮的偏转角度,以模拟电压形式反馈至转向控制器。
转向控制器由转向控制模块和电机驱动器组成,转向控制模块以PIC18F258为核心处理器,接收CAN总线上的转向指令,读取角度传感器的测量值,控制减速电机带动全液压转向器动作,使转向轮旋转至期望角度,其工作原理如图6所示。
2.3 精量喷雾控制器
针对喷雾阀组中流量阀的执行机构及其特性,设计了如图7所示的精量喷雾控制器,包括PIC18F258单片机及外围电路、CAN总线物理芯片PCA82C250、L298N电机驱动器。
精量喷雾控制器接收CAN总线上的速度信息和期望流量值,通过端口C0、C1、C2控制流量阀电机的动作以调节其开口大小从而改变药液流量。
2.4 CAN总线通信网络
自动驾驶高地隙施药机具备油门、车速、刹车、喷杆、液泵、精量喷雾、发动机启停等多个控制装置的ECU,均需接收导航系统和遥控装置的控制指令。为便于ECU间的数据传输,设计了图8所示的CAN总线通信网络,具备不同ID的所有节点均可收发CAN总线信息。
人工遥控/自动导航2种控制模式间的切换由遥控操作系统进行决定,各个执行机构的ECU接收导航控制系统和遥控操作系统发布的CAN总线控制指令(油门、车速、转向、刹车、喷杆伸缩与升降、液泵启停、发动机启动/熄火等)并根据控制模式和节点ID选择执行相应的CAN总线控制指令。
3 导航控制方法
3.1 定位误差校正
自动驾驶高地隙施药机为自走式农业机械,整机质量1 300 kg,轮胎宽度12 mm。与拖拉机、联合收获机相比,其质量较小、胎面较窄,受田间地面起伏的影响极易发生倾斜。底盘最小离地间隙为1 100 mm,GNSS天线固定位置的离地高度为2.46 m,在左右倾斜(即横滚角)1°时天线偏离误差达40 mm,在作业过程中需要实时感知车体的倾斜角度以进行定位测量误差校正,如图9所示。
He等[24]基于三维姿态传感器测量插秧机的空间姿态,并根据RTK定位系统测量得到的位置数据计算插秧机构的实际位置,以消除机体倾斜引起的定位误差。其在计算过程中,需要精确测量天线与机体、机体与插秧部的相对位置。而对于不同机型,实际相对测量精度难以保证。在直线导航过程中,在一定倾斜范围内机体的横滚角对横向偏差影响最大、对航向角的影响可忽略,而俯仰角对横向偏差和航向角测量的影响可以忽略。因此,本研究在考虑横滚角的前提下,只需测量天线中心位置与机具中心的相对距离,便于导航系统在现场的快速安装使用。
定位天线和定向天线分别安装于机器的左右两侧,以垂直于地面的天线所在平面、车体中心线、地面三者的交点位置作为机器的实际位置,则在车体横向平面内定位天线与重心O的横向距离ε为:
其中,
根据Δδ的值可以判断点AL相对于车体中心线的位置。当AL位于车体中心线的左侧和右侧时,矢量ALO的方向角ΨA分别如式(3)和(4)所示。
式中ΨV为RTK-GNSS车体航向角,以UTM平面坐标系的正北为基准。点O的平面坐标(EO,NO)由AL坐标(EA,NA)按式(5)计算。
3.2 作业路径规划
自动驾驶高地隙施药机在自动导航模式下,能够按照路径规划完成直线自动行驶、地头自动调头、自动上线等基本动作。在水平路面上的最小转弯半径R是3.5 m,喷幅W是12 m,按照矩形地头转弯方式进行路径规划,如图10所示。
当机器到达点A后开始执行地头调头过程,以最小转弯半径转弯至点B后沿直线行驶至点C,然后以最小转弯半径到达点D,接着沿下一作业路径继续直线作业。在自动导航过程中机器一直处于行驶状态,因导航误差和位置测量采样间隔的存在,机器不可能经过点A。因此,需要综合考虑以上因素判断机器是否到达地头。在采样频率足够大、导航精度较高的情况下,机器以较小的横向偏差经过点A,按公式(6)计算当前位置测量点E与点A的距离d。
式中η为机器当前位置E的平面坐标;ηA为点A的平面位置坐标。当距离d小于设定值时,即判断为到达地头。在导航精度较差的情况下,因横向偏差较大,距离d不会小于设定值,采用如下方法计算夹角α:
若α>90°,即判断机器到达地头。
在实际作业过程,因作业地块土质差异和机器自重变化,其最小转弯半径有所不同。为保证地头调头时路径跟踪的准确性、调头后上线的快速精准,在作业过程中实时测量最小转弯半径R。
在机器到达点B后,根据半径R的大小由公式(9)和(10)分别计算点B和点C的平面坐标(EB,NB)和(EC,NC),以生成导航路径并使机器沿路径BC自动行驶。
矢量的方向角ΨAB和ΨAC由公式(12)计算。
3.3 关键参数自动标定
因机体结构尺寸不同、安装过程存在一定的随机性,导航传感器在自动驾驶高地隙施药机上的固定位置有所差异,需要事先对与导航控制相关的多个关键参数进行标定,主要包括航向、姿态、转向角度极限位置、直线行驶前轮角度等。其中,航向的准确测量受定位天线和定向天线安装位置的影响,且需要在机器行驶过程中进行标定。
如图11所示,航向自动标定过程中,机器从η0开始以固定的转向角前进,同时记录RTK-GNSS测量的位置序列和航向序列,计算行驶距离d0:
当d0大于行驶距离设定值时,航向角变化值ΔΨ为:
式中Ψ和Ψ0分别为机器在η和η0时的航向角,(°)。若ΔΨ小于航向角变化设定值1.5°,则认为机器直线行驶,此时机器实际航向角ΨV由公式(15)计算。
其中(E0,N0)和(E,N)分别为位置η0和η的UTM平面坐标。在位置η时的航向测量值为Ψm,测量航向偏差为
则在标定后的航向角为
同时,记录位置η处的角度传感器的测量值φ0,即为机器直线行驶时的前轮角度。在自动转向过程中,转向控制器以φ0值为直线行驶基准,根据转向指令计算前轮的目标角度。
4 田间试验
为了测试人工遥控和自动导航2种操作模式下的系统稳定性和路径跟踪精度,于2020年9月在山东省淄博市山东理工大学生态无人农场进行田间试验。
4.1 试验条件
试验地块的前茬作物是青贮玉米,行距60 cm,青贮收获后的留茬高度20~25 cm,如图12所示。
试验区域为60 m×30 m,在人工遥控和自动导航2种模式下的直线行驶和地头转弯分别重复3次,用车体上安装的VectorNav VN-100型IMU测得田间行驶时的横滚角范围是-3.5°~+3.5°。
4.2 试验方法
自动驾驶高地隙施药机的作业幅宽是12 m,作业路径为直线,采用矩形地头转弯方式。人工遥控和自动导航时的测试速度均为3.6 km/h。
如图13所示,用RTK-GNSS测量作业区域中A0、B0两点的坐标(588 536.219,4 073 823.937)、(588 587.175,4 073 817.858),用拉直的软绳标记出基准行A0B0及相邻行A1B1为人工遥控操作提供参考。为避免标记路线与实际行驶路径重合不便于人工操作,设置50 cm的左侧偏移量使目标路径与规划路径横向偏移50 cm。自动驾驶高地隙施药机从点A0开始启动作业,行驶路线为A0→B0、B1→A1,到达边界时进行地头转弯后进入邻接行继续作业。在人工遥控模式下,操作人员跟随机器移动的同时使用遥控器控制机器的动作使其沿软绳标记出的直线作业行前进,用RTK-GNSS记录行驶路径并计算横向偏差和航向偏差。在自动导航模式下,导航控制器向机器各ECU发送指令实现路径自动跟踪等动作,自动完成地头转弯并进入下一直线作业行。
4.3 结果与分析
图14 为人工遥控和自动导航2种模式下的实际行驶路径与规划路径对比。在人工遥控模式下,由人工操作遥控器使自动驾驶高地隙施药机从点C0(588 541.066,4 073 824.061)出发沿目标路径A0B0和A1B1。在自动导航模式下,自动驾驶高地隙施药机从点C0(588 540.798,4 073 824.147)出发,其初始横向偏移和航向偏角分别为14 cm和4.4°,上线距离是2.2 m,横向偏差和航向偏角收敛至平均值的距离是3.3 m。
在地头转弯控制方面,人工遥控模式下的转弯过程存在一定的随机性,在积累一定的作业经验后操作人员能够保证转弯后的准确快速上线。而自动导航模式下的转弯过程较为稳定,能够根据转弯方式自动完成调头并准确快速上线。人工遥控和自动导航下的直线路径跟踪误差如表3所示。
由表3中可知,人工遥控模式下直线路径跟踪的横向偏差和航向偏角的最大值分别为20.81 cm和7.86°,RMS误差最大值分别为7.47 cm和2.66°。横向偏差在0附近波动,平均值为0.02和0.90 cm,表明操作人员能够感知到较大偏离并及时操控机器做出响应,同时表明自动转向系统能够实时执行人工遥控操作指令将转向轮偏转至目标角度,转向响应特性和准确度均满足作业要求。自动导航模式下直线路径跟踪的横向偏差和航向偏角的最大值分别为8.84 cm和2.48°,直线作业路径的RMS误差最大值分别为4.66 cm和1.08°。由人工遥控和自动导航两种模式下的数据对比可以看出,自动导航模式下路径跟踪的RMS误差值均小于人工遥控模式下的误差值,具备较高的路径跟踪精度。同文献[7]所研制的喷杆喷雾机自动导航系统在旱田条件下的试验结果相比,其最大横向偏差和最大RMS误差均较小,能够满足喷雾作业要求。因此,在自动导航模式下所研制的高地隙施药机自动驾驶系统具备快速收敛性且保持较高的稳定性和准确度。而人工遥控模式下,需要操作人员兼顾横向偏差和航向偏角的同时自行确定前轮转向角的大小,且航向偏角较小时肉眼难以感知导致误差过大且不稳定。

表3 人工遥控和自动导航模式下的路径跟踪误差 Table 3 Path tracking errors under manual remote control and autonomous navigation
5 结 论
为提高施药作业机械的自动化和智能化程度,避免操作人员现场农药中毒等潜在风险,本文以高地隙施药机自动驾驶系统为研究对象,设计了操纵机械关键部件和自动导航控制方法,并对高地隙施药机自动驾驶系统的田间作业性能进行了试验验证,主要结论如下:
1)设计了用于油门调节、车速调节、自动转向、发动机启停、喷杆伸缩、液泵启停的自动执行机构、控制ECU和CAN总线通信控制系统,能够接收人工遥控系统和自动导航系统的控制指令,实现了作业模式的实时切换;
2)通过分析定位误差来源,提出了倾斜误差补偿方法,根据天线安装位置和车体横滚角度实时解算机器的实际位置,能够有效应对田间地面起伏不平的作业状态;
3)通过实时记录转弯过程计算最小转弯半径,进行地头转弯过程中的直线路径规划,提高了地头导航的准确度,同时减小邻接行的上线距离;
4)田间试验表明,作业速度为3.6 km/h时,人工遥控和自动导航均能使机器沿作业路径行驶;在有参考标记的情况下,人工遥控和自动导航的最大横向偏差为20.81和8.84 cm,平均值为0.90和3.16 cm,均方根误差最大为7.47和4.66 cm,表明高地隙施药机自动驾驶系统的转向机构具备较高的稳定性和准确度。
猜你喜欢
科学技术与工程(2022年23期)2022-09-30
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
科技与创新(2021年24期)2022-01-03
现代装饰(2021年3期)2021-07-22
音乐天地(音乐创作版)(2021年5期)2021-07-16
客车技术与研究(2021年2期)2021-04-23
民用飞机设计与研究(2019年4期)2019-05-21
当代陕西(2018年24期)2019-01-21
农民致富之友(2018年21期)2018-12-27