
基于北斗卫星通信定位的战斗机队形指挥控制系统设计
2021-08-04 08:37秦明峰
计算机测量与控制 2021年7期
秦明峰
(1.中国电子科技集团公司 第五十四研究所实验室,石家庄 050081;2.卫星导航系统与装备技术 国家重点实验室,石家庄 050081)
0 引言
战斗机主要用于保护我国领土安全,是我国的一种重要飞行武器,目前战斗机的有效使用权限只限定在军用领域。战斗机具有较好的飞行性能和攻击性,完成任务时通常用于团体协作,战斗机的队形对于战斗机执行任务的完成效果十分重要,在执行任务过程中,战斗机排列的某一种队形不是随机而定的,而是需要考虑战斗机工作的环境因素、任务难度因素、干扰因素等各个条件,以保证战斗机之间信号传输的稳定性和队形位置的精准度,设计的一种战斗机飞行队形[1-2]。
为了确保战斗机在队形指挥控制过程中,对战斗机的通信干扰能力最低,为提高战斗机执行任务的攻击力以及工作效率,本文进行基于北斗卫星通信定位的战斗机队形指挥控制系统的研究设计,以北斗卫星通信定位为辅助条件,提高战斗机变换队形的效率。在完成系统设计后,利用对比试验测试分析,验证此系统的功能性,实现本文预期的设计目的。
1 基于北斗卫星通信定位的战斗机队形指挥控制系统硬件设计
本文设计的基于北斗卫星通信定位的战斗机队形指挥控制系统硬件主要由定位器、指挥器、信号接收器和监控器四部分组成,系统硬件结构如图1所示。
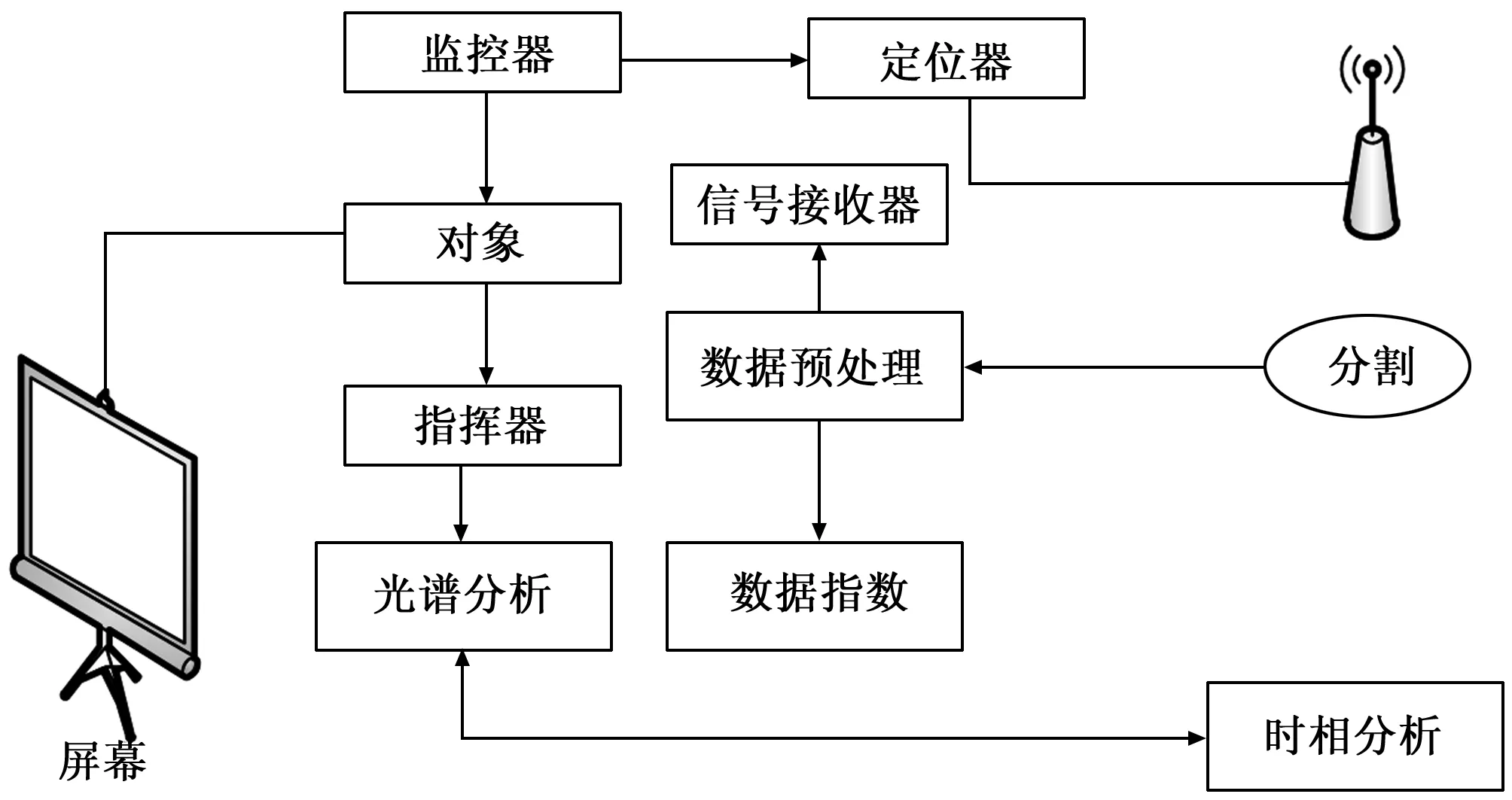
图1 战斗机队形指挥控制系统硬件结构
战斗机队形指挥控制系统硬件结构主要由监控器、定位器、指挥器及信号接收器组成。通过定位器时刻确定战斗机的相对地理位置,并将位置信息传输至监控器,由指挥器下达战斗机队形变换指令,通过信号接收器实现战斗机之间和战斗机与总指挥之间的通信连接。
1.1 定位器
因为本文设计的战斗机队形指挥控制系统,为了提高系统的交互性,融入了北斗卫星通信定位技术,在系统硬件区域设计了定位器,此器件的设计目的是时刻确定战斗机的相对地理位置,并协助部署中心,发布最合理的战斗机队形指挥控制任务[3-4]。定位器结构如图2所示。

图2 定位器结构图
为了使战斗机达到以上的功能,选用HD-38型号的定位器,此定位器的地理数据库与我国卫星定位数据库相同,数据信息充足,保证定位的精准度和定位效率。定位器与计算机端相连,器件采用塑封模式,防止器件风化,降低系统性能,定位器在战斗机位置确定过程中,集成GPS定位、北斗定位、LBS定位以及WIFI定位技术,并且设置监控器,方便系统复盘工作。此定位器采用充电电池,电池容量为6 000 MH,可以持续工作100天[5-7]。HD-38型号定位器电路图如图3所示。

图3 HD-38型号定位器电路图
1.2 指挥器
战斗机队形指挥控制系统硬件区域的指挥器的工作任务是执行指挥中心下达的战斗机队形变换指令,指挥器的灵敏性尤为重要,影响到系统的工作效率,本文选择HD-72X型号的指挥器。HD-72X型号指挥器结构图如图4所示。

图4 HD-72X型号指挥器结构图
指挥器采用超大太阳能板资源的循环利用,完成工作,蓄电池为12 V/20 AH,太阳能板的指标为18 V/50 W,指挥器不是单独进行工作的,硬件区域的传感器共同协作,执行战斗机队形指挥指令,此器件的调节误差在5%范围内,支持CSTA或者TSAPI接口,采用5路数字用户接口板,另外器件的优点是在对任务进行了解后,如果任务在实际应用中不可实现,指挥器会立即将信息反馈到系统的控制中心,指挥器的频带范围为80~1 500 Hz,可以完成A-LAW、IMAADPCM格式的信息编码和解码[8-12]。
1.3 信号接收器
系统硬件区域信号接收器的工作任务是在战斗机队形指挥控制过程中,维持战斗机之间和战斗机与总指挥之间的通信,信号是通信领域不易受到干扰的一种传输介质,因此系统的通信采用信号完成[13-15]。
信号接收器的外壳采用高密度防水防锈航空铝合金制作而成,具有自动待机降噪、节能功能,信号接收器具有3个模式,分别为单频、双频、三频。器件的最大增益为92±2 DB,工作电压为220 V/AC,有效覆盖面积为9 000平方米,信号可以120°完成信号的全方位发射,器件内置AGC芯片,对其他频道的信号出现混淆,工作的输出功率为17±5 dbm,频率为B1/B2/B5/B8,4种档位。信号接收器内部插入PA和LNA,提高信号接收器的灵敏性。
1.4 监控器
监控器的工作主要是对战斗机队形指挥控制操作过程进行监控,一旦战斗机的队形变换行为与预期的执行指令不符合后,监控器将此行为的所有信息打包发送到总指挥处,并对行为检验复盘,短时间内降低战斗机队形变换的速度,检查无误后再调整为正常的速度[16-18]。
监控器采用宝气无线360°全景监控器,监控器可以完成录像回放、全彩夜视、侦测报警等功能,电池通过UPS续航电源进线充电,电池的供应为DC 5 V±10%,监控器的屏幕设置为5MP高清画质,500万像素,1 080 P的画质,监控器摄像头采用IP66级材料,防水防电耐高温。监控器的影像帧率根据实际监控环境情况进行自适应调节,无线标准采用IEEE802.11b,频率为2.4 GHz,传输速率为11 b:1 mbps,监控器有效的红外线监控距离为300米。监控器电路图如图5所示。

图5 监控器电路图
2 基于北斗卫星通信定位的战斗机队形指挥控制系统软件设计
在硬件结构基础上,设计战斗机队形指挥控制系统的软件部分。引入北斗卫星通信技术,通过集成主动式双向测距技术,完成对空间段、地面段和用户段三方的位置定位,解决问题。定位技术的原理是以定位物品为中心,向任意方位的两个卫星发送相对位置信号,卫星经过对发送信息处理以及数字高程值的查询,将北斗信号解码处理,计算出需要定位位置的经纬度坐标,然后通过服务器传回到用户端,完成定位操作。北斗卫星定位技术的定位精度可以达到0.2米/秒,授时精度为10纳秒,对于本文研究的战斗机队形指挥系统来说,可以实时掌握战斗机队形变换过程中每台战斗机的地理位置,提高队形指挥控制的交互性。
战斗机队形指挥控制主要的流程是控制战斗机的队形变换、队形保持以及队形控制,不同队形调度控制过程中需要考虑所有战斗机的位置,时刻保证战斗机之间的安全距离以及相对位置,防止战斗机出现飞行误差,为此战斗机在队形指挥控制过程中也采用专业的运动行为进行整体队形的指挥,完成控制任务[19-21]。对于专业的运行行为考虑到战斗机的飞行质量、地势的变化、不考虑地球自转和大气扰动带来的影响,首先建立一个三维立体的坐标系,将战斗机的飞行运行涵括在内,战斗机的运动方程如下所示:
(1)
其中:x、y、z表示战斗机的位置变量;V表示速度;φv表示战斗机队形变换飞行的偏转角;θ表示战斗机队形变换飞行的倾斜角。
根据队伍内战斗机的数量、地理位置和任务要求,考虑到战斗机的飞行动力矩阵和内部关系,得到战斗机指挥运动过载计算公式如下所示:
(2)
其中:nx表示战斗机队形变换过程中的运动分量;ΔFd表示队形变换过程中的侧力;m表示战斗机的质量;表示滚动角;
根据上述对战斗机飞行模型和运动载力的分析,构建n个战斗机队形指挥运动模型,如下所示:
(3)
其中:dn表示战斗机之间相对的距离;ρ表示战斗机的气动系数;X1表示各个战斗机的坐标;其他未知数意义同上。
经过以上的分析,完成了基于北斗卫星通信定位的战斗机队形指挥控制系统的设计,接下来总结此系统的工作具体流程,如图6所示。
首先将系统的所有功能模块和器件初始化设置、完成初检测试后,开始启动系统。然后系统接收由总控制中心发送的战斗机队形指挥控制命令,对此命令进行剖析,根据需要编排战斗机的数量、地形状况、位置条件等数据信息,带入战斗机队形运动编队模型内,计算生成一套最规范的战斗机队形指挥控制方案。最后将方案上传到系统的硬件区域,集成相应的器件,对所有战斗机按照方案进行指挥控制操作,在此过程中,监控器实时显示战斗机队形变换状态信息,保证指挥控制的无误性,如果出现异常,立即上报,提高问题解决的效率,如果无问题,持续完成操作,将监控数据存档,结束控制任务,开始下一个战斗机队形指挥控制任务。
3 实验结果与分析
为了检验此系统的性能是否有效,进行对比试验,选取基于人工势场分析的战斗机队形指挥控制系统和所设计基于北斗卫星通信定位的战斗机队形指挥控制系统共同完成测试,确保试验的真实性和科学性。
3.1 实验方法
本次试验将30个相同型号的战斗机随机分为3组,每组保证10架战斗机,然后再设置3组战斗机队形的编队状态,分别为“人”形编队、“大”形编队、“S”形编队,在试验进行开始后,利用一分钟时间,完成战斗机队形指挥控制任务的选取,并将任务发布到3个系统内,保证试验的公平性。3个测试的战斗机队形指挥控制系统,分别与3组战斗机进行串联连接,构成一个对比试验测试的基本框架。本文通过对战斗机队形指挥控制系统的研究,明确了该系统性能的基本表现状态,通过对比试验确定了战斗机队形完成的匹配度、战斗机队形指挥控制过程中的总体收敛误差和战斗机队形指挥控制中通信信号的稳定性3个比较因素。在试验前,工作人员需要进行试验预处理操作,主要工作为检查每架战斗机的性能、测试场地、数据分析仪、系统是否成功调用,一切准备好后,开始测试,本次试验抽取的战斗机队形指挥任务为使每组战斗机构成“S”形编队,下达任务后,开始试验,计算机记录测试数据,计算机全部接收到3组战斗机任务完成响应后,结束试验测试、整理测试数据、完成测试分析。
3.2 实验结果讨论
以上设定的对比试验测试流程具有逻辑性,并且满足战斗机队形指挥控制系统工作的条件约束,因此测试的结果具有可信度。得到的匹配实验结果如表1所示。

表1 指挥系统匹配实验结果
通过上述测试结果,得出本文设计的战斗机队形指挥控制系统的队形完成匹配度最高,平均值达到了99.9%,基于人工势场分析的战斗机队形指挥控制系统的队形完成匹配率较低,为96%。根据计算机对战斗机队形变换数据和系统指挥控制数据的分析,战斗机队形指挥控制过程中,战斗机的整体收敛误差最高的是基于人工势场分析的战斗机队形指挥控制系统,收敛误差最低的是本文设计的系统。因此,根据以上的试验测试结论,可以得出本文设计的系统比基于人工势场分析的战斗机队形指挥控制系统的性能好,指挥控制战斗机队形的交互性高。
在此基础上测试两种系统对3组相同型号的战斗机的队形指挥控制耗时情况,得到对比结果如图7所示。
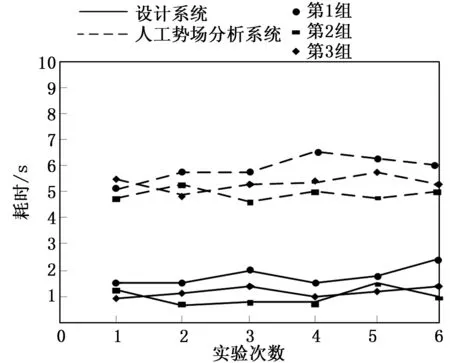
图7 基于北斗卫星通信定位的战斗机队形指挥控制系统
如图7所示,在6次实验过程中,人工势场分析系统对“人”形编队的队形指挥控制耗时平均值为6.2 s,对“大”形编队的队形指挥控制耗时平均值为5.1 s,对“S”形编队的队形指挥控制耗时平均值为5.5 s;而所设计系统对“人”形编队的队形指挥控制耗时平均值为1.7 s,对“大”形编队的队形指挥控制耗时平均值为0.9,对“S”形编队的队形指挥控制耗时平均值为1.2 s。所设计系统的控制耗时较短,系统运行效率较好。
综上所述,基于北斗卫星通信定位的战斗机队形指挥控制系统的交互性和控制指挥性能最佳,达到本文预期设定的目标。
4 结束语
本文设计基于北斗卫星通信定位的战斗机队形指挥控制系统。硬件分别设计了定位器、指挥器、信号接收器、监控器,将系统性能的配置达到最高,系统软件分析了北斗卫星定位技术的核心、战斗机队形指挥运动编队模型以及战斗机队形指挥控制系统功能的具体实现流程,使系统具有交互性和操作性,保证战斗机变换队形过程中,各种通信信号的持续通信,指挥控制指令的百分百传递,提高战斗机的工作效率。本文设计的战斗机队形指挥控制系统对于其他类型的飞行器也具有一定的适用性。
猜你喜欢
科技创新导报(2021年33期)2021-04-17
科学导报·学术(2020年26期)2020-10-21
商情(2020年31期)2020-07-23
作文大王·低年级(2019年6期)2019-08-01
科学与财富(2019年4期)2019-04-04
妇女(2018年7期)2018-09-19
小学生作文选刊·低年级版(2017年4期)2017-06-07
南风窗(2015年11期)2015-09-10
现代电子技术(2009年14期)2009-09-05
新媒体研究(2009年10期)2009-07-02
