
无人机倾斜摄影三维实景建模及其应用
2021-08-02 13:18:10侯仁福
智能城市 2021年13期
侯仁福
(安徽省第一测绘院,安徽合肥 230031)
无人机倾斜摄影系统通过无人机在同一低空飞行平台上搭载多台传感器,同时从1个垂直、4个倾斜共5个不同的角度采集影像数据,能够快速还原建筑物实景原型,记录建筑位置、纹理、关系等信息生成三维实景模型、点云、TIN、DSM、DOM等数据产品。
1 无人机倾斜摄影三维建模的关键技术
1.1 主要技术流程
无人机倾斜摄影进行三维实景建模的流程为资料收集及分析、现场踏勘和制定航飞方案、航线布设及部分像片控制点标志布设、倾斜摄影、像片控制点测量、多视角影像预处理、区域网空三加密、DTM/DEM编辑和生产、TIN模型构建、正射纠正、纹理自动关联、三维精细模型建立及精修、三维实景模型数据检查、DOM/DSM和三维实景模型成果提交。具体流程图1所示。
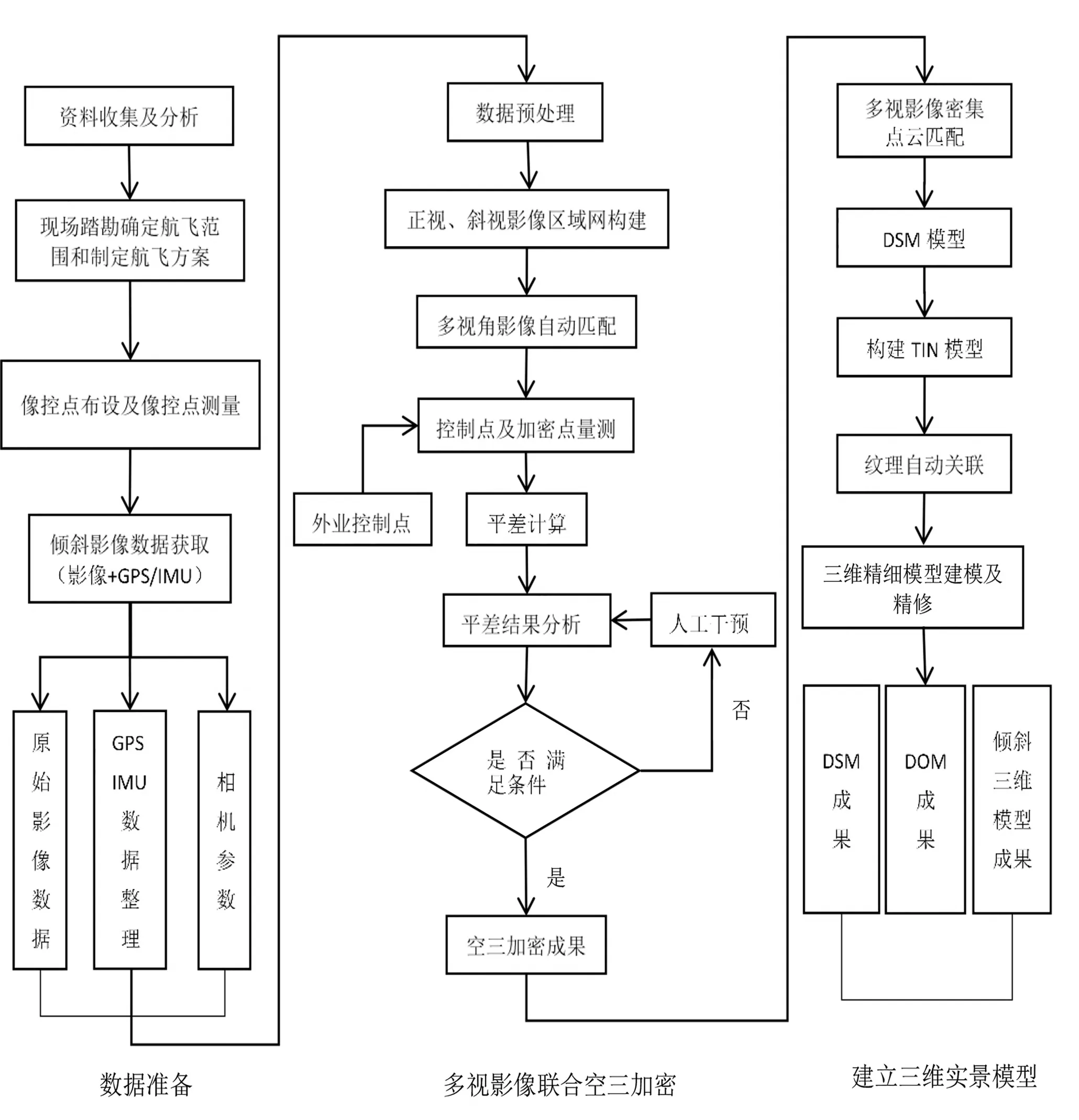
图1 技术流程
1.2 关键技术探讨
无人机倾斜摄影三维模型现已广泛应用于高精度的不动产测量(包括房地一体项目)、大比例尺测图(1∶500地形图)、智慧城市等方面,都需要高精度三维实景模型(厘米级)。三维实景模型成果的精度与相机像素、镜头焦距、像片数量、像片重叠度、飞行高度、控制点数量及精度等众多因素相关。
(1)受限于无人机和相机的采集质量、环境影响等各种复杂因素,为了满足高精度模型要求,像片控制点的布设方案和设计要高于规范要求,控制点分布对模型精度影响较大,像控点越稀、模型精度越差,但像控制点密度过多,对模型精度提高有限。项目区应采用格网法布点,项目区各边角外应布设足够的像控点。
(2)像片控制点测量精度越高,越有利于提高三维实景模型精度。像控点及精度检查点利用AHCORS系统,采用RTK测量或双频接收机双参考站模式按快速静态方式施测;高程采用水准测量或以控制点CGCS2000坐标为起算数据,利用安徽省区域似大地水准面精化模型内插控制点的高程异常值,确定各控制点高程,H正常高=H大地高-ζ,ζ为高程异常,提高高程精度。
(3)模型精度一般是地面分辨率的2~3倍,地面分辨率越高,模型精度越高,模型效果越好,但影像处理时间长,成本较高。
(4)像片重叠度对模型精度影响较大,航向重叠度越小、影像拍摄间距越大,航线间距越大。降低航向重叠度,采集影像越稀,生成模型扭曲变形、拉花越严重,模型精度越低。
(5)采用具有RTK和PPK的飞行设备,RTK测量技术具有快速高精度定位功能,实时获得摄站三维坐标,PPK测量技术为后处理,定位频率高。无人机速度快,RTK实时定位可能信号丢失,PPK高频率定位弥补此不足,且作业范围更大。采用双重定位技术进行融合解算,避免信息失效,可提高精度。
2 试验与分析
2.1 项目概况
根据安徽省测绘局部署,安徽省第一测绘院承担黄山市风景区三维实景建模,包括西递、宏村、呈坎、唐模、潜口民宅、徽州古城、牌坊群鲍家花园七个景点;项目区内居民地比较集中,房屋密集。采集优于2 cm高分辨率无人机倾斜摄影数据,生产高精度三维实景模型,建模软件为Smart3d。
2.2 数据采集
项目采用混合动力五轴旋翼无人机搭载定制的五相机倾斜航空摄影系统,正射25 mm、倾斜35 mm相机,像元为4.5 μm;地面分辨率为2 cm。每个景点为一个航摄分区,每个分区飞一个架次(补飞除外),航片共54 175片;三维实景模型区域约3.2 km2,共布设25个像控制点、11个检查点,均为平高点。
2.3 三维数据处理
外业数据采集获取的原始影像数据、POS数据、像控点数据、进行数据预处理基于Context Capture Center软件,结合POS系统提供的外方位元素和相机
安装位置关系模拟所有影像(包括倾斜影像)的地表投影范围,采取由粗到精的金字塔匹配方式,在各级影像上进行同名点自动匹配和光束法区域网平差。
利用已有的外业像片控制点,在影像上进行刺点,每个控制点的每个视角(单镜头)3~5张影像,利用控制点进行绝对定向。在空三平差迭代计算过程中,进行必要的人工干预,检查连接点分布情况和连接强度,利用内部提供的工具进行人工连接点修改,得到点云,找到成像角度好、分辨率高的影像作为纹理数据源,优选出纹理影像映射入模型中,从而建立三维实景模型。
七景区三维实景模型之一如图2所示。

图2 七景区之一高精度三维实景模型
2.4 精度分析
为了检验三维实景模型的几何精度,在三维实景建模区域内外业采集了11个精度检查点。精度检查点要求在成图范围内的地面、低层建筑物、高层建筑物等不同高度、不同类型的样本上分别采集。
模型精度分析:借助检查点,读出11个检查点在模型上的坐标和高程,与该点的实际坐标和高程进行对比以及精度评估。
精度统计结果如表1、表2所示。

表1 平面精度统计 单位:m
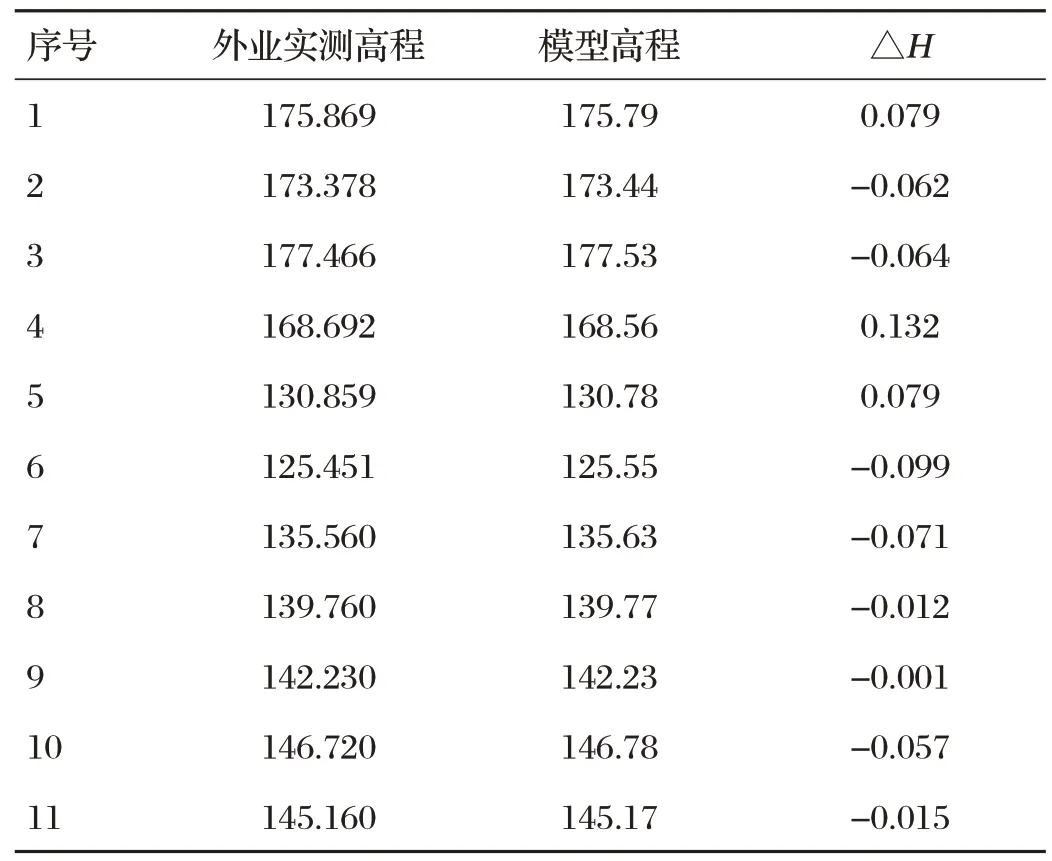
表2 高程精度统计 单位:m
由表可知,平面精度中误差为±0.05 m,接近满足不动产测量成果规范要求,低于《城市测量规范》(CJJ/T 8—2011)中地物点相对于邻近平面控制点的点位中误差。高程误差±0.072 m,低于《城市测量规范》(CJJ/T 8—2011)中平面高程注记点相对于邻近图根点的高程中误差。
平面精度为±0.05 m,检测点数为11个,粗差个数为0,粗差率为0。
高程精度为±0.072 m,检测点数为11个,粗差个数为0,粗差率为0。
2.5 项目生产的经验总结
通过无人机倾斜摄影三维实景建模七景区项目(相当于7个子项目)生产和实践,总结生产经验。
(1)像控点高精度是空三加密精度的保证。
像控点的位置选择情况也关系到精度高低,个别测在围墙角上、门墩上和牌坊上的像控点,内业难以量测正确(生产中重新布设点位和测量),外业测量也不能保证像控点高精度。像控点只能做检查点或废点处理,浪费了人力、物力和宝贵的时间。像控点应尽量分布在空旷道路交叉口的位置,可选取特征明显的地物如斑马线角点、道路中心线的角点、不同颜色路面交汇角点,提前布设像控点标志等。外业要检查像控点点之记,查看像控点的位置情况。
像控点标志如图3所示。

图3 像控点标志
(2)保证测区边界处模型纹理完整性。
由于航向和旁向重叠度大,像对(基线)间有效面积小,在模型制作过程中航向和旁向范围应超出测区边界的基线数,高于规范规定数目(本项目航向超出测区边界不少于7条基线,旁向超出测区边界不少于3条基线)。地物存在较大高差时,应当提高像片重叠度,保证高处重叠度。房屋密集时也需要提高重叠度,保证模型效果和精度。
(3)保证空三精度和接边精度。
相对定向结束后,观察POS点排列是否平整,如果出现较大高差(不同航高),则分别进行空三,空三完成后再合并处理,保证空三精度和接边精度。
(4)Smart3d空三对控制点的依赖较高。
作业中应先对区域内数据进行空三自动加密,根据自动加密结果,对项目区空三加密进行人工处理,适当添加控制点、检查点对连续性不好的区域进行补点,检查残差报告,以确保绝对定向精度。
(5)空三加密是三维建模的关键。
加密过程中,合理分块、控制点的选取及添加密度、连接点检查及相机参数检校以消除分层问题,都是影响空三质量的因素。解算的外方位元素精度高、空三精度高,能够大幅度减少后期修模工作量。
(6)提高建模效率。
子项目区域面积比较大即像片总数大于14 000张时,空三应采用分块分别进行空三加密,新建工程合并,建模采用集群式多台计算机来提高建模效率。
3 无人机倾斜摄影三维实景建模的应用
随着无人机倾斜摄影三维实景建模技术不断成熟,凭借大范围、自动、快速、低成本、高精度、高精晰的构建三维实景模型的优势,三维实景模型的真实纹理效果和测绘级精度被广泛应用于大比例尺地形图测绘、智慧城市、城市管理、国土资源管理、地质防灾、不动产测量等领域。
无人机倾斜摄影建模技术在当前全国正在实施的“房地一体”项目优势明显。
(1)作业优势。
非接触方式,降低感染风险;人为误差小;成本低,效率高。
(2)成果优势。
直观反映建筑物层高、外表建筑材料;直接切准房檐的房角位置,减少工作量;直接量算每个建筑物占地面积等,无人机倾斜摄影建模加速“房地一体”进程。
4 结语
本文探讨了无人机倾斜摄影三维实景模型关键技术及流程,并以黄山七景区项目三维实景建模为例,对平面和高程精度进行了分析验证。结果表明无人机倾斜摄影三维实景模型精度符合相关标准和规范要求,相较于传统建模方式,三维实景模型在纹理和色彩更逼真,模型几何精度和生产效率具有重大的优势,且数据采集更便捷,影像分辨率高,成为当下测绘领域的重要测量方式之一,受到测绘人士的高度认可,在各个领域得到广泛应用。但无人机倾斜摄影三维实景模型也具有一定局限性:
(1)三维模型精度要求高,影像数量大幅度增加,处理效率下降。
(2)三维实景建模的要求较高的完整性和高精度,但实际模型遮挡影响,存在漏洞、模糊等缺陷,甚至受天气、光线、太阳高度角影响,模型出现地物边缘晕渲的情况,导致补飞、补测等工作量增大,降低效率。
(3)无人机倾斜摄影三维实景模型生产与生产人员经验有较大关系,需要磨合和积累。
无人机倾斜摄影测量技术可与激光扫描等其他技术相结合,解决遮挡、避免后发问题,并补充测量手段,进一步提高节约运算时间,提高效率。未来还需要对如何减少误差、提高精度等进行进一步研究。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
现代测绘(2018年3期)2018-09-13 09:34:46
企业科技与发展(2018年5期)2018-09-10 00:20:39
科学与财富(2017年19期)2017-07-19 10:59:15
长江工程职业技术学院学报(2017年2期)2017-06-19 18:49:05
北方音乐(2017年4期)2017-05-04 03:40:09
