
上肢康复机器人力交互控制系统设计
2021-08-02 07:40聂志洋孟巧玲喻洪流
软件导刊 2021年7期
聂志洋,孟巧玲,喻洪流,余 杰
(上海理工大学康复工程与技术研究所,上海 200093)
0 引言
脑卒中是一种急性、突发的脑血管疾病,具有高发病率、高致残率、高死亡率等特点[1]。据2020 年发布的《中国心血管病报告2019》数据推算,我国现有心血管疾病患者约2.9 亿,其中脑卒中患者约1 300 万,脑卒中发病率以每年8.7%的速度增长,发病后致残率达86.5%[2]。脑卒中引起的肢体障碍给患者、家庭和社会都带来了严重的负担[3-4]。
运动物理治疗是常见的康复治疗手段之一,其主要通过人体主动或被动方式活动关节和肌肉,促进患者机体功能恢复、帮助患者调整心理状态[5-6]。康复治疗需要长期、高密度的康复训练,传统的治疗方式是康复治疗师一对一对患者进行指导训练,而我国康复治疗师和康复从业者严重不足,使得很多患者难以得到有效的康复训练,对康复效果产生极大影响[7]。康复机器人的诞生在一定程度上缓解了康复治疗师的压力,让越来越多的患者能接受到更好的康复治疗。上肢康复机器人能使康复治疗师同时兼顾多位患者[8-9],安装的众多传感器为训练提供详细的量化数据,有助于对治疗情况进行评估[10]。传感器还能用于检测患者运动意图,实现患者与康复机器人之间的交互。然而,由于上肢康复机器人属于较大的康复器械,传统训练方式是被动康复训练,长期接受被动训练会使患者丧失训练积极性,不利于脑功能重建。
人机交互技术是研究计算机系统和人体协同合作的技术[11],常用的交互方式有:上位机图形界面交互、力交互以及虚拟现实游戏交互等。本文研究的人机交互主要是用户与上肢康复机器人之间的力交互,是患者感受最直接的交互方式,目的是增强用户在使用过程中的体验感和融入感[12]。
1991 年世界首台可在平面运动的上肢康复机器人在麻省理工大学面世,之后康复机器人研究如日中天[13]。其中,苏黎世大学的ARMin上肢康复机器人拥有良好的游戏交互功能和丰富的七自由度,然而其过重的机械结构和噪音对患者产生影响[14-15];哈尔滨工业大学五自由度上肢外骨骼机器人可为患者提供主被动式康复训练,但其为采用表面肌电信号采集患者意图,存在数据不稳定和不准确问题[16];美国特拉华大学的机器人拥有丰富的自由度,且采用轻便的绳索驱动,但没有解决绳索张紧问题[17]。综上所述,现阶段的上肢康复机器人虽发展较快,但自由度数量少、体积大、意图检测准确率低、质量笨重及其带来的力交互体验效果不佳等问题仍未得到很好解决。本文针对这些问题设计了一款轻巧、自由度丰富、意图检测准确、交互体验好的上肢外骨骼康复机器人。
1 实验样机与功能设置
本文的力交互柔顺控制系统以一台三自由度的上肢外骨骼机器人为基础,该上肢康复机器人具有快速左右手互换能力,且配有升降电机,适合不同体型患者使用。上肢康复机器人在结构上采用中央驱动式布局,最大化地减小了机械臂的体积,同时设备本身能够移动。此外,为了适应不同患者的身高、姿态等情况,设置了电动升降机构,可以调节机械臂高度,以保证患者最舒适的训练位置。本设计选用的医用升降柱行程为680mm,采用遥控控制,基本能满足设计需求。在底部基座预留了较大空间,主要用来安放供电系统中的空气开关、交流接触器、开关电源以及主控系统中的硬件电路等。机械臂作为整个上肢康复机器人最重要的一环,在康复训练中承担着支撑患者手臂和提供动力的功能,本文的机械臂采用符合人体结构的连杆结构。上肢康复机器人的机械臂安装在一个转盘基座上,三自由度分别由3 台瑞士MAXON(马克松)直流无刷电机传动,并搭配MAXON EPOS2 电机驱动器使用。电机A、电机B 分别驱动肩关节的抬高/压低、伸出/缩回运动,电机C 通过绳索传动带动肘关节运动,如图1 所示。整个系统可满足上肢功能患者的基本康复功能需求,具备多关节联合训练和单关节训练能力。然而,要实现更个性化的训练,实现柔顺的力交互过程,还需要设计相应的力交互控制方案。

Fig.1 Centrally driven upper limb rehabilitation robot图1 中央驱动式上肢康复机器人
2 力交互控制系统设计
2.1 系统总体设计
力交互方案设计旨在加强患者的主动训练意识,提高患者参与度进而提升康复质量,如何使得外骨骼可以跟随患者的运动意图进行运动且不对患者产生不适的阻力和干扰是要解决的技术问题。患者在主动训练过程中不可避免地要与机器产生力交互,而这种相互作用力是最直观代表患者意图的信号,接触力的大小反映了患者运动意图的强烈与否。通过对这种力信号进行采集分析,进行不同程度的力补偿设定,控制对应运动关节的电机产生补偿力矩,使得机械臂跟随患者的动作进行运动并进行力补偿,完成主动康复训练,系统逻辑及设计如图2 所示。
2.2 硬件系统搭建
基于上肢康复机器人在主被动康复训练过程中的需求对力交互柔顺控制系统硬件平台进行设计,包括主控MCU 选型及其外围电路设计、供电系统设计、传感器选型及主控芯片采集模块设计。

Fig.2 Force interaction control system in active mode图2 主动训练模式下力交互控制系统
硬件平台的合理设计对软件功能和系统安全运行具有重要意义。主控系统需要负责系统中所有上位机命令的接收、电机控制指令的下发、多路传感器数据采集及内部算法的运算等,这些都要求充当主控系统核心的芯片具有较强的即时运算性能,并且有丰富的外设资源,能为系统提供足够的内部中断和定时器。对外通讯支持RS232 串口协议和CAN 通信协议。因此,控制系统的主控芯片采用ST 公司的STM32F4 系列单片机STM32F407ZGT6[18]。
系统供电是保证整个系统安全运行的基础,电源系统的稳定关乎整个系统稳定,在供电系统设计时需要考虑最大安全电流、漏电保护、纹波干扰、静电辐射等情况。本设计中各类硬件设备的工作电压不完全相同,如直流电机及其驱动器的额定工作电压为24V,扭矩传感器等采集系统的工作电压为5V,MCU 所需要的工作电压为3.3V 等。系统 采用3 个DC-DC 降压电路实现220V 对24V 降压、24V 对5V 降压以及5V 对3.3V 降压,从而满足系统所有硬件的供电需求。
力交互柔顺控制系统众多功能实现依赖于外部传感器的数据采集,主控系统对传感器采集的信号处理后转换成可以被识别的数据,由MCU 的ADC 采集接口接收。除了电机自带的霍尔传感器用以检测机械臂的扭矩变化之外,为精确获取患者作用于机械臂力的变化情况,选用SRI公司M2210A 扭矩传感器。此传感器最大可测量力矩50Nm,且测量误差小于0.04Nm,能满足上肢康复机器人在力交互过程中对力矩的控制需求。
2.3 软件系统设计
在完善的硬件系统上进行合理的软件设计,能最大限度发挥硬件性能,保证系统顺畅运行。软件系统设计包括系统与外部固件之间通信方式、康复训练轨迹规划和力交互柔顺控制算法设计,还包括传感器数据的采集与处理、电机驱动算法和PID 算法在系统中的应用等,整体控制流程如图3 所示。
控制系统整体运行流程大体分为4 个部分:①系统各模块初始化;②系统自检,没有故障则进入等待状态;③接收控制命令并执行;④发送和接收数据,与上位机通信。

Fig.3 Software design flow of control system图3 控制系统软件设计流程
力交互主要发生在主动模式下。主动模式是一种患者凭借其主观意识自主完成的康复训练,机械臂对患者的主动运动不产生阻碍效果,即控制机械臂始终保持对患者手臂的“跟随”状态。在软件实现上,首先要克服上肢康复机器人机械臂自重和患者患肢自重;其次要能正确、精确地检测患者的自由运动情况,控制上肢康复机器人做跟随运动。
本设计中的上肢康复机器人模式所选用的电机为马克松无刷直流伺服电机,其内置的霍尔传感器能精确采集电机的位置、电流、速度等信息。直流无刷伺服电机的输出力矩大小与电机的电流呈对应关系。设置电机的运行模式为电流模式,伺服电机、霍尔传感器和驱动器形成闭环控制,通过改变电机电流的大小间接改变期望电机输出的力矩大小[19-20]。
首先利用电流检测患者意图,假设患者的患肢已经在上肢康复机器人的机械臂上固定妥当,且经过电机的力矩输出已经实现了重力平衡。患者在试图动作患肢时,会与固定的机械臂发生接触,极其细微的动作都会引起电机电流变化。利用电流的变化反映患者力的变化,就能实现对患者运动意图的识别。此外,为了避免电流意图检测精度问题,特地引入电机扭矩传感器检测方式,以便更精确地对患者运动意图进行采集;其次采用PID 控制算法,让关节快速响应到目标力矩[21]。
3 力交互控制实验
本实验通过对机械臂施加不同大小和方向的外力,检测系统能否作出正确反应。设置肩关节屈曲/伸展自由度上触发的力矩值分别为0.9Nm、0.7Nm、0.5Nm、0.3Nm,调节肩关节前屈角度分别为30°、60°和120°,在以上条件下分别进行实验,用拉力计施加外界助力,通过电机上位机软件记录电机的输出力矩,记录助力值大小和电机输出助力力矩大小。实验效果如图4 所示。

Fig.4 Effect chart of force interaction experiment图4 力交互实验效果
首先在肩关节前屈角度为30°、肘关节屈曲角度为0°时,设置触发力矩为0.5Nm,对上肢康复机器人机械臂的肩关节施加外部助力,收集肩关节电机的力反馈数据和额外助力值大小,结果如图5 所示。
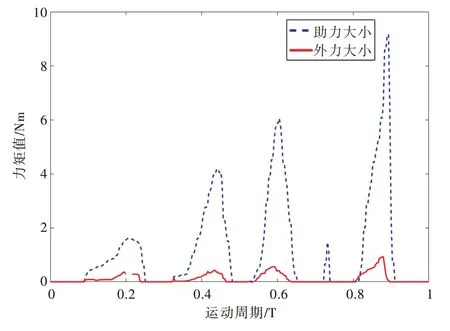
Fig.5 Experimental data curve of force interaction图5 力交互实验数据曲线
然后在同样的关节角度条件下,按实验计划设置不同的触发力矩重复实验,测试力交互情况,得到的实验结果如表1 所示。
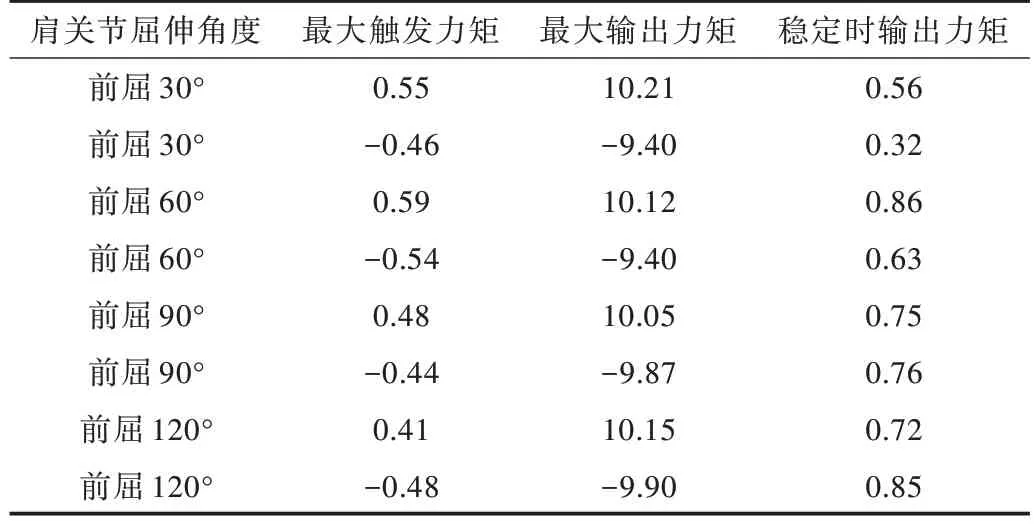
Table 1 Result of the force interaction experiment表1 力交互实验检测结果 (Nm)
从表1 的数据可知,在助力康复训练时,肩关节在各前屈角度时为患者提供补偿的触发力矩约为0.46Nm,反向触发力矩为0.55Nm,相应时间在1ms 以内,显示本设计的力交互符合基本设计要求,能满足实际训练需求。
4 结语
为解决传统上肢康复机器人在力交互过程中柔顺性差、使用者体验不佳问题,本文以中央驱动和套索电机复合驱动的方式,简化上肢康复机器人的机构复杂度,减轻重量,从而减弱机器在力交互过程中的影响;其次在控制系统上结合电机自身的霍尔传感器和电机编码双传感器,实现患者运动意图的精确识别;最后设计阈值触发补偿力矩和电机PID 控制方案,对患者训练进行动力补偿。力交互实验结果显示,患者在运动过程中只需要极小的触发力就可带动上肢外骨骼进行助力,准确性高,使用效果好。本设计为整个康复训练动态周期中的力交互深入研究打下了基础。
猜你喜欢
装备制造技术(2020年11期)2021-01-26
中华养生保健(2020年2期)2020-11-16
测控技术(2018年6期)2018-11-25
中国自行车(2018年4期)2018-05-26
制造业自动化(2017年2期)2017-03-20
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
中国民族医药杂志(2016年7期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
