
超声波雷达、毫米波雷达与激光雷达数据融合的研究*
2021-07-30 06:58刘兆伦梁志辉
机械工程与自动化 2021年2期
刘兆伦,周 明,周 延,李 琳,梁志辉
(合肥工业大学 机械工程学院,安徽 合肥 230009)
0 引言
传感器是现代机器系统和无人驾驶系统中必不可少的部件,各种传感器对信息的获取存在方式和原理上的差异,使得信息的精确度也无法保证。本文针对在无人驾驶小车上安装的超声波雷达、毫米波雷达和激光雷达的数据融合问题,提出了一种数据融合思路。
1 数据融合预处理
融合多种雷达数据的方法是先将各种雷达接收到的数据进行预处理,将各自数据中的杂波和不需要的信息剔除,以减少融合处理器中的数据存储量[1],然后再将这些数据进行中央级数据融合[2]。在进行数据融合前需进行超声波雷达、毫米波雷达和激光雷达的数据预处理:超声波雷达返回的数据只有距离信息,通过对比距离信息,只留下距离相对较近的数据传入融合处理器;毫米波雷达返回数据的信息包括目标的径向距离、速度、方位角等,首先通过相邻采样点之间的车辆数据特征变化去除无效目标[3],通过对距离信息的对比过滤掉距离太小和太大的目标信息,通过对速度的对比过滤掉静止的目标信息,然后将过滤后的数据传入融合处理器;考虑激光雷达的安装位置精度及车辆行驶的需要,给出一个限定范围,首先去除有效范围外的无关数据点,再通过滤波的方式滤除一些孤立的噪声点[4],将过滤后的数据传入融合处理器。其中,超声波雷达选取车辆前侧多个超声波雷达测量数据求取平均值得到预处理后的数据,毫米波雷达和激光雷达则采用多次测量求得平均值的方法得到预处理后的数据。
预处理后可以发现,数据在测量范围误差之内,之后则进行数据融合,其思路是将激光雷达传入数据的距离、速度等信息提取出来,分别与同一时刻内超声波雷达传入数据的距离信息和毫米波雷达传入的距离与速度信息作对比,如果相对应数据的误差在合理的范围内,则将两者的数据求和取平均值作为对应目标的数据信息;超声波雷达和激光雷达处理后的数据包含目标的径向距离和方位角等信息,且与车辆的相对距离较小;经过激光雷达和毫米波雷达处理的数据包含目标的距离、方位角和速度等信息,与车辆的相对距离较为安全,可以通过建立一个线性卡尔曼滤波跟踪器来进行跟踪。
一般系统的状态方程和观测方程可以表示为如下形式:
xk=Axk-1+Buk+wk.
zk=Hxk+vk.
其中:xk为k时刻的系统状态;A为系统的状态转移矩阵;B为系统的控制矩阵;uk为系统控制量;wk为系统过程高斯白噪声;zk为k时刻的测量值;H为系统的测量矩阵;vk为系统测量高斯白噪声。
通过卡尔曼跟踪算法[5]可以将当前目标信息中的位置信息作为测量值,利用测量值和跟踪器上一时刻的状态所得到的预测值来更新跟踪器的状态向量和估计误差的协方差等结果,然后预测下一时刻的状态。按照预测—实测—修正来对目标进行位置确定,从而提供更准确的信息。
2 节点分类数据融合
多传感器信息的融合是把分布在不同位置、不同种类的传感器所提供的局部环境的部分信息通过一些方法进行融合,从而得到所需的较为准确的环境信息。
本实验将超声波雷达分别安装在车辆的前侧、左侧以及右侧,毫米波雷达安装在车辆的前侧,激光雷达安装在车辆的前侧。其中,超声波雷达收集的数据经过处理后成为障碍物与雷达之间的距离,毫米波雷达收集的数据为径向距离、速度、加速度以及方位角,激光雷达收集的数据为方向角、实际转速以及实际距离。先进行同质与异质信息的划分,同质即传感器观测的是同一物理现象,异质则观测的不是同一个物理量[6]。可以得出,同质信息有距离信息、方向角的角度信息和速度以及加速度的状态信息;异质信息分为三类:第一类为超声波雷达、毫米波雷达和激光雷达的距离信息,简称S;第二类为毫米波雷达和激光雷达测出的方向角的角度信息,简称L;第三类为毫米波雷达测出的速度以及加速度的状态信息,简称Z。对特征信息提取分类后将多个超声波传感器探测的距离信息经过“同类型多传感器融合算法”进行数据预处理[7],这样可以提高超声波雷达测量的精度。
多传感器融合的结构模型有集中式、分布式和混合式三种,通过上述分析可知,在处理超声波雷达、毫米波雷达和激光雷达的数据融合中,采用混合式处理[8]较为合适,即集中式和分布式的混合,经过局部传感器先对收集的信息进行预处理,其中还伴随有未经处理的原始观测数据,再将这些数据依次传入主处理器分析后得到指令。
多传感器融合的数学模型启发于神经网络和模糊理论的方法思路[9],即将同质传感器局部集中融合进行数据预处理后再采用分布式并行信息处理方式,选取多个节点模拟人类的神经元来处理信息,同时每一个节点是在载传感器物体行进过程中通过遇到的不同种情形进行概括总结,从而以模糊规则来实现数据信息的提取。因此我们观察行进物体的不同情形来确定其分类规则,再根据不同传感器的精度范围选择较为合适的数据提取方式。其中,超声波雷达在0.004 m~3 m之间距离测量较为准确,毫米波雷达在远距离测距中较为精确,测距可达150 m,激光雷达在0.15 m~8 m之间测量数据较为准确。由此确定分类规则:①在无障碍物时,行进物体按照原来设定的参数继续前进,而不做任何的处理;②在前方出现障碍物时,若在3 m以内在S中提取超声波雷达数据,超过3 m则在S中提取毫米波雷达数据;③在左前方、右前方出现障碍物时,若在3 m以内在S中提取超声波雷达数据、L中提取激光雷达数据,超过3 m则在S中提取毫米波雷达数据、L中提取激光雷达数据;④在左侧、右侧出现障碍物时,则提取左、右侧的超声波雷达信息(提取信息均为预处理后的数据信息)。因此分不同节点分类作出数据提取分析,最后由处理器作出决策判断。节点分类数据融合流程如图1所示。
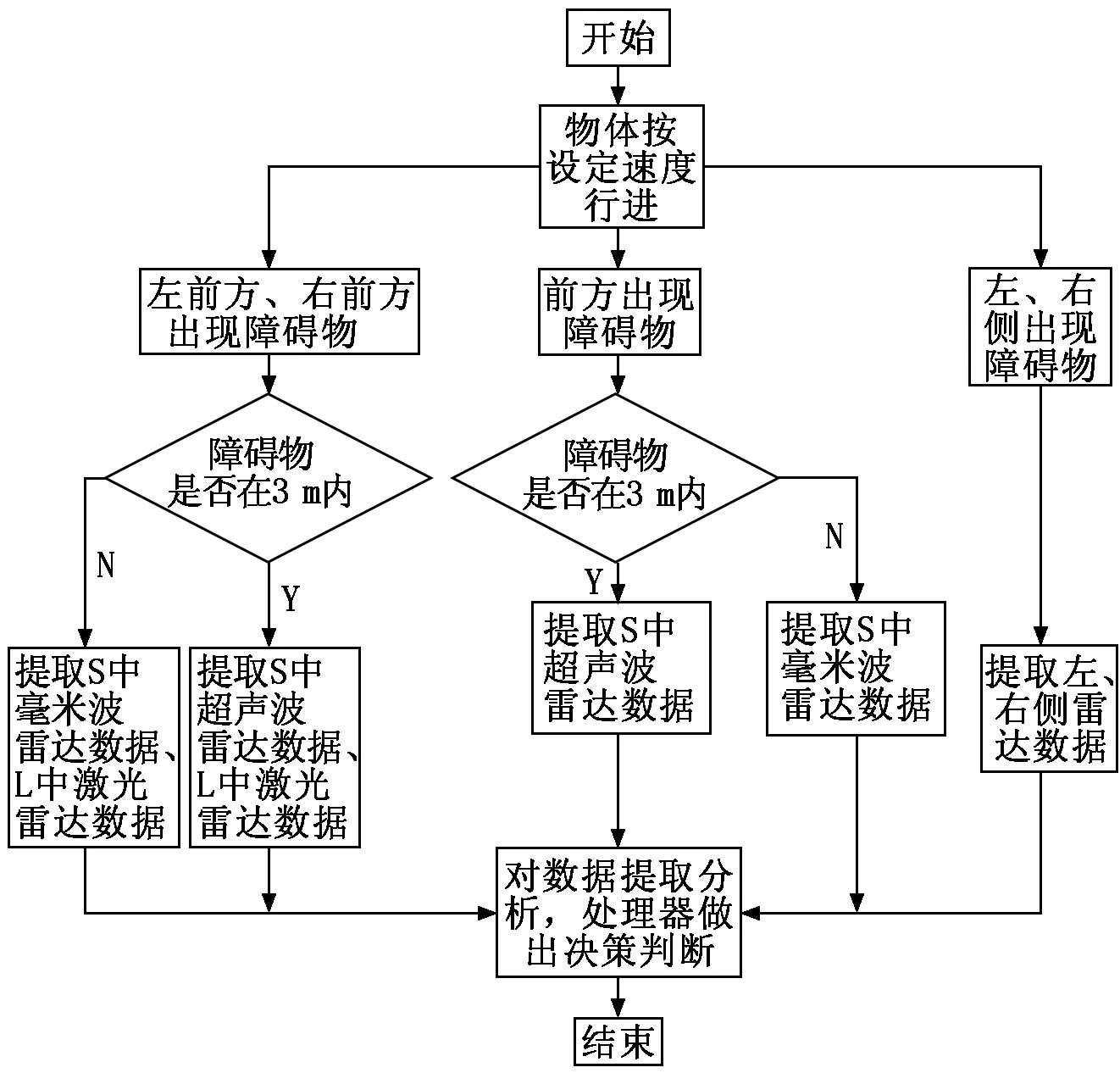
图1 节点分类数据融合流程
3 结论
本文提供的数据融合思路是在数据预处理的基础上进行数据融合,这样可以极大地降低传感器所带来的误差,提高测量的准确性。从集中式、分布式和混合式数据融合的结构模型中选取适合的方法进行数据预处理和节点分类数据融合,划分同质、异质数据,可以更加高效地进行数据融合,并从预测、实测和修正三个角度对数据信息进行分类,从而提供了一种较为可行的数据融合方法。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
中国交通信息化(2019年1期)2019-03-26
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
电子制作(2018年16期)2018-09-26
制导与引信(2017年3期)2017-11-02
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
工业设计(2016年11期)2016-04-16
