通用航空集成航电系统GPS延迟时间的分析
2021-07-30 09:13:06丛超
测控技术 2021年7期
丛 超
(安徽华明航空电子系统有限公司,安徽 芜湖 241000)
全球定位系统(GPS)信号在现代军、民领域应用广泛,其在航空导航方面的使用尤为突出。GPS信号可以提供高精度的位置、速度和定时等导航信息,是飞行员或自动驾驶仪操控飞机的重要依据。
通用航空的集成航电系统多采用实时多分区的系统架构[1-2],由于系统软、硬件的固有缺陷和信号传输等原因,GPS信号从接收到使用的过程中,必然存在一定的时间延迟。从目前各类通用飞机的典型航电系统架构来看,例如美国Garmin公司的G1000航电系统、美国Avidyne公司的Entegra航电系统(这两套系统在全球中低端通用飞机中的安装比例占80%以上)。航电系统的发展向综合化和模块化趋势进化,主要以综合显示器(Primary Flight Display,PFD和Multi-Function Display,MFD)为核心构建整个系统,系统综合化程度非常高,综合显示器除了完成系统的集中显示控制功能外,还作为机载计算机,通过应用软件实现飞行管理、状态监控、合成视景等系统核心处理功能,实现显示控制与处理的综合。因此软件计算过程中的延迟因素成为GPS信号延迟时间中越来越不可忽视的一部分。时间延迟对飞行带来潜在的危害,速度越快,潜在的危害就越大。因此,GPS信号和航电系统之间的实时数据同步问题必须解决,对时间延迟的准确测量是工程上的难点[3]。文献[4]以速度和位置误差为观测量,采用卡尔曼滤波算法对系统进行信息融合;文献[5]~文献[9]对汽车的定位精度和GPS延迟时间进行研究,但不能满足高速飞行精度要求;文献[10]~文献[14]没有给出针对时间延迟的补偿方法,或者给出的方法并不适用通用航空航电系统。
通用航空的机载集成航电系统功能越来越强大,但上述文献中的现有研究均未对通用航空集成航电系统的GPS延迟时间进行论述,特别是没有针对应用软件在航电系统中所占比例不断增加的趋势,深入分析软件算法与GPS延迟因素之间的关系。结合通用航空集成航电系统GPS信号使用的原理,根据系统中应用软件相关算法的特性,将延迟时间分为可测量部分和未知部分两份估算,计算最大可测量部分时间,用卡尔曼滤波法得出未知部分最优估计值,从而得出相对准确的延迟时间的总估算值。
1 时间延迟的原因
通用航空集成航电系统在GPS信号使用方面,基本结构框图如图1所示。
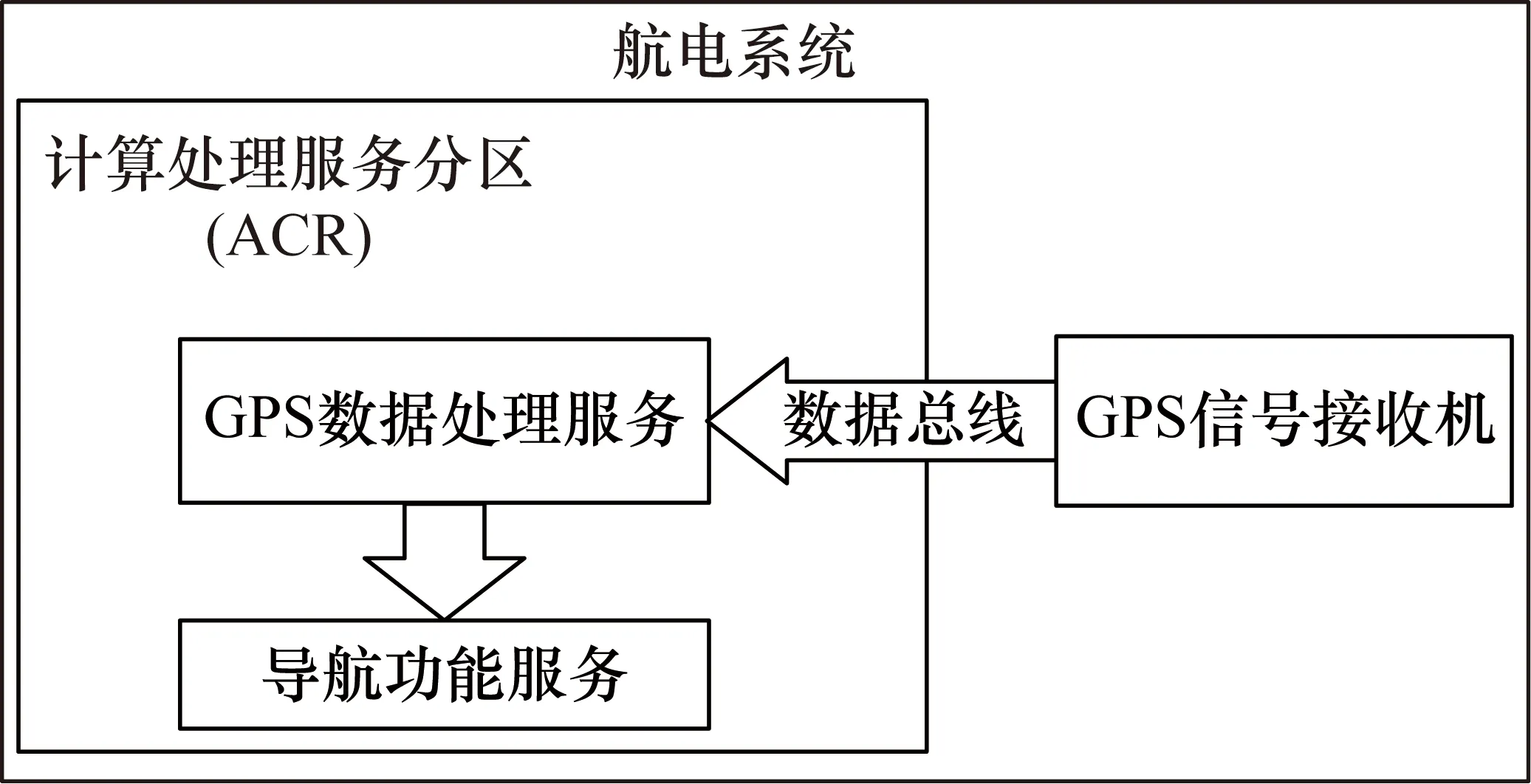
图1 集成航电系统GPS信号使用框图
数据处理一般流程为:GPS信号接收机接收和解析信号,通过总线传递数据至计算服务分区(ACR)。ACR中GPSserver服务格式化数据并发布,导航子系统读取数据、解析出位置和状态信息。
产生时间延迟的因素主要有4方面:① GPS信号接收机数据接收和解算延迟;② 接收机传输到ACR的传输时间;③ GPSserver处理数据时间;④ 导航子系统处理数据时间。
2 延迟时间估算
延迟时间估算原理图如图2所示,可分为4步:① 粗略估计总延迟时间;② 获得延迟时间中的可测量部分;③ 获得未知部分的最优估计值;④ 得到总延迟时间。
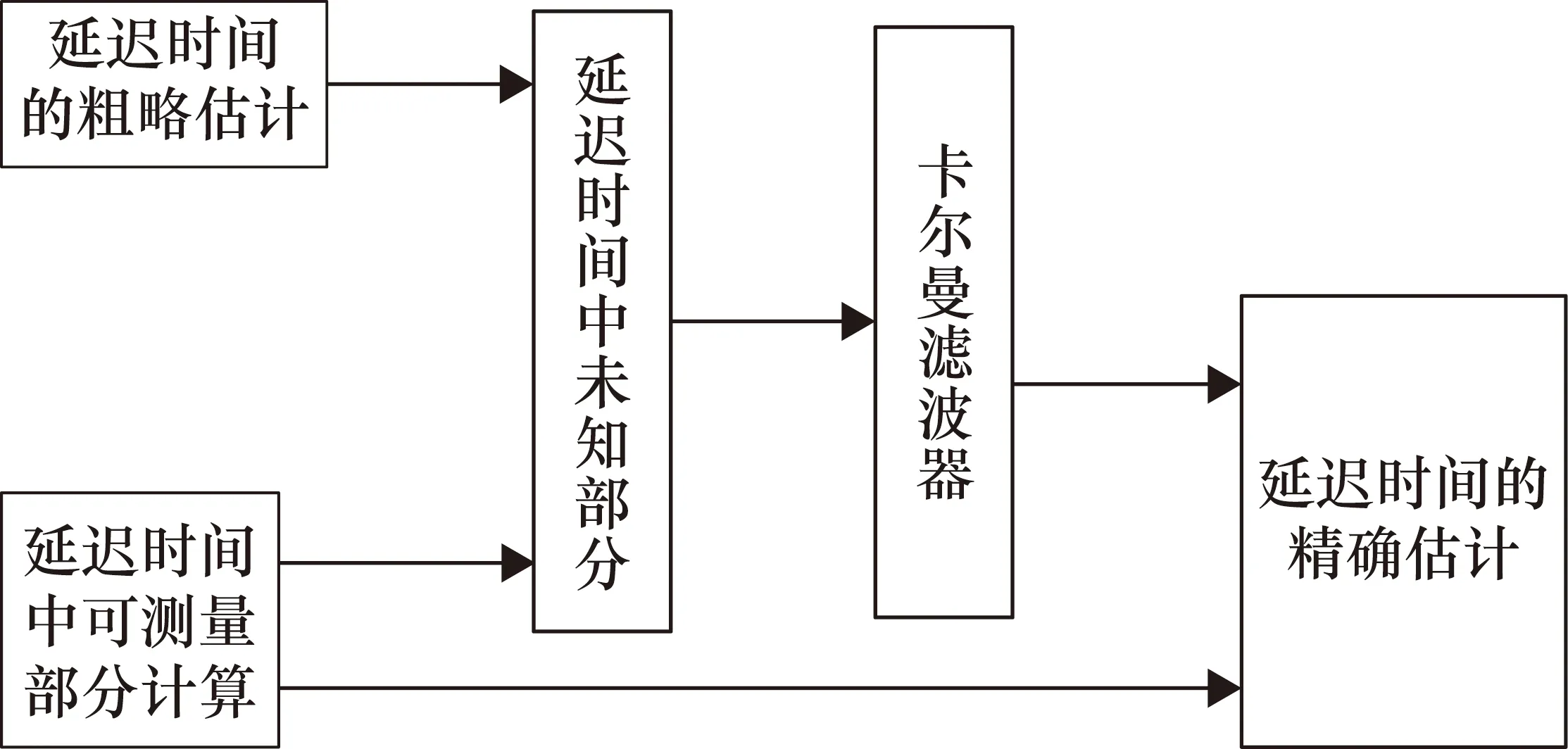
图2 延迟时间估算的原理图
2.1 粗略的时间延迟估计方法
粗略的时间延迟估计有两种方法:飞行数据比较法和航向差或速度差检测法。
2.1.1 飞行数据比较法
参考文献[7]中的分析方法,利用飞行数据记录中的GPS数据和航姿参考系统(AHRS)数据,在同一坐标系内绘制转弯-时间曲线,得出GPS信号中的转弯迟滞于AHRS系统转弯的数据。计算其在不同延迟校正下的差值平方和,进行最小二乘法滤波处理,计算极值对应的时间延迟。
2.1.2 航向差或速度差检测法
飞行时实时解算GPS和AHRS数据,参考文献[8]中的航向差检测算法和速度检测算法,分别计算时间延迟,取最佳值。两种方法具体如下所述。
(1) 航向差检测算法。
分别提取一段时间内AHRS的航向角速度积分的角度(注意是磁航向角而不是陀螺仪计算的飞机旋转角)和根据GPS信号计算的角度,形成两列航向差测量序列,使两个序列差值的欧几里得范数最小,检测准则为

(2) 速度检测算法。
分别提取一段时间内AHRS加速度积分的速度(注意不是大气数据计算机计算的空速)和根据GPS信号计算的速度,形成两列航向差测量序列,使两个序列差值的欧几里得范数最小,检测准则为

这两种算法各有优劣,对于汽车等低速运动物体可以满足使用,但对于高速移动的物体,如飞行器等,显然其精度无法满足要求,需要在粗略估计的基础上进一步分析,估算更精确的延迟时间。
2.2 可测量部分的确定
图3为定性的分析GPS信号数据流。图3中的时间标准有两套,一套是GPS时间(即UTC国际协调时),一套是ACR时间(即计算机系统时间)。

图3 GPS信号数据流
图3中,Tn-1为第n-1次GPS定位的时间;Tn为第n次GPS定位的时间;TN,n为第n次导航子系统数据发布时间;ΔtGPS为GPS信号发布周期;ΔtGPSserver为GPSserver数据发布周期;ΔtNav为导航子系统数据发布周期;ΔtACR,n-1为GPSserver和导航子系统第n-1次数据更新时的延迟时间;ΔtACR,n为GPSserver和导航子系统第n次数据更新时的延迟时间;Δtn-1为第n-1次GPS信号传输至GPSserver的延迟时间;Δtn为第n次GPS信号传输至GPSserver的延迟时间。
2.2.1 确定延迟时间计算公式
由图3可知:
Tm=Tn-1+ΔtGPS+ΔtACR,n+Δtn
(1)
Tm=Tn-1+ΔtNav+ΔtACR,n-1+Δtn-1
(2)
式中,Tm为TN,n对应的GPS时间标准的时间。
因为Tn-1是GPS信号时间戳时间,ΔtGPS可通过测量GPS信号间隔获得,ΔtACR,n,ΔtNav,ΔtACR,n-1可通过测量ACR时间间隔获得,它们都属于可测量时间,所以式(1)、式(2)可简化为
Tm=TGPSmeasure+Δtn
(3)
Tm=TNavmeasure+Δtn-1
(4)
式中,TGPSmeasure=Tn-1+ΔtGPS+ΔtACR,n;TNavmeasure=Tn-1+ΔtNav+ΔtACR,n-1。
Δtn-1,Δtn为来源于GPS信号和GPSserver之间的传输延迟,因为两个时间标准不同,所以无法测量,但它们与GPS信号更新周期和GPSserver数据更新周期有关系。
① 如果ΔtGPSserver=ΔtGPS,则ΔtP=ΔtGPSserver-ΔtGPS=0,即Δtn=Δtn-1。
② 如果ΔtGPSserver>ΔtGPS,则ΔtP=ΔtGPSserver-ΔtGPS=Δtn-Δtn-1>0,即Δtn=ΔtP+Δtunknow。
则式(1)可变化为
Tm=TGPSmeasure+ΔtP+Δtunknow
(5)
③ 如果ΔtGPSserver<ΔtGPS,则ΔtP=ΔtGPS-ΔtGPSserver=Δtn-1-Δtn>0即Δtn-1=ΔtP+Δtunknow。
则式(2)可变化为
Tm=TNavmeasure+ΔtP+Δtunknow
(6)
式中,ΔtP为GPSserver和GPS数据更新的周期差;Δtunknow为Δtn-1或Δtn,均为未知时间。
计算时间延迟的目的是为了同步GPS标准时间和ACR系统时间,即得到Tm的准确时间。由上述分析可知,不论用哪个公式计算,Tm总是由可测量时间和未知时间两部分组成。从估计的角度来说,未知量越小,已知量越大,Tm的估计结果相对就越准确。所以
① 当ΔtGPSserver=ΔtGPS时,如果TGPSmeasure>TNavmeasure,则用式(3)计算Tm相对准确,则时间延迟为
Δtdelay=ΔtACR,n+Δtunknow
(7)
否则,用式(4)计算Tm相对准确,则时间延迟为
Δtdelay=ΔtACR,n-1+Δtunknow
(8)
② 当ΔtGPSserver>ΔtGPS时,如果TGPSmeasure+ΔtP>TNavmeasure,则用式(5)计算Tm相对准确,则时间延迟为
Δtdelay=ΔtACR,n+ΔtP+Δtunknow
(9)
否则,用式(4)计算,时间延迟公式见式(8)。
③ 当ΔtGPSserver<ΔtGPS时,如果TGPSmeasure>TNavmeasure+ΔtP,则用式(3)计算Tm相对准确,时间延迟公式为式(7)。否则,用式(6)计算,则时间延迟为
Δtdelay=ΔtACR,n-1+ΔtP+Δtunknow
(10)
式中,Δtdelay为GPS信号更新至Nav更新数据之间的时间延迟。
由于ΔtACR,n-1,ΔtP,ΔtACR,n都是可测量的时间,所以式(7)~式(10)可简化归纳为
Δtdelay=Δtmearsure+Δtunknow
(11)
式中,Δtmearsure为可以测量的时间延迟;Δtunknow为不可测量的时间延迟。
2.2.2 卡尔曼滤波估算未知延迟时间
由2.1节中的方法,可以得到时间延迟的粗略估计,再结合式(11),可得
Δtunknow=ΔtdelayProbale-Δtmearsure
式中,ΔtdelayProbale为利用2.1节中的方法得到的时间延迟的粗略估计。
这样未知时间Δtunknow就有一个粗略的估计值,对其进行卡尔曼滤波解算。
系统状态方程为
X(k+1)=X(k)+w(k)
系统观测方程为
Z(k)= ΔtdelayProbale-Δtmearsure(k) +v(k)
式中,w(k)为系统噪声;v(k)为观测噪声,均假定为零均值高斯白噪声。
假定未知延迟的第n-1次最优估计值和第n次的预测值相等,粗略估计的总延迟和可测量时间的差值作为当前的观测值。得到第n次延迟中未知延迟的最优化估计。利用式(11),将滤波后的未知延迟时间的最优估计值和可测量值相加,得到最终的时间延迟。
3 实验验证
为检验算法有效性设计模拟仿真实验,分别计算未进行延迟补偿、固定延迟时间、用本算法给定最优延迟补偿3种状态的误差,对本算法有效性进行验证。
3.1 实验条件
利用航电系统模拟软件Avisim,飞行速度在110~170 kn(1 kn=0.514 m/s)之间变换,时间在550 s以内,固定延迟时间拟定300 ms,计算发布速度、AHRS的速度,利用最小二乘法对其误差平方和滤波处理,计算极值对应的时间延迟,分析比较3种延迟的结果。
3.2 试验结果分析
图4~图9分别为未进行延迟补偿、给定固定延迟时间、用本算法给定最优延迟时间3种情况的发布速度、AHRS速度曲线图和最小二乘法滤波的曲线图。

图4 未进行延迟补偿的发布速度和AHRS速度曲线

图5 未进行延迟补偿的最小二乘法滤波曲线

图6 固定延迟时间的发布速度和AHRS速度曲线

图7 固定延迟时间的最小二乘法滤波曲线

图8 最优时间延迟的发布速度和AHRS速度曲线
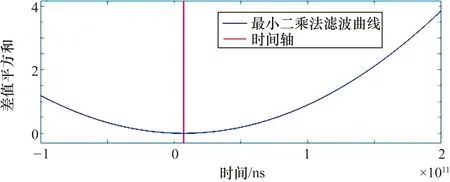
图9 最优时间延迟的最小二乘法滤波曲线
由图4、图6和图8可以看出,发布速度(蓝线表示)是系统给出的计算后的速度,在未进行时间延迟补偿、固定时间延迟补偿和最优延迟时间补偿3种方式测试中,其曲线始终滞后AHRS的速度曲线(红线表示)。AHRS速度的获取来自惯导,近似为飞机实时速度,说明GPS延迟时间是客观存在的。由图5、图7和图9求出未进行时间延迟补偿、固定时间延迟补偿和最优延迟时间补偿3种方式测试中的延迟时间估算值(红色中轴线)分别为5.590×109ns、1.695×109ns和1.115×109ns。由此可见不进行延迟时间补偿和进行延迟时间补偿的效果很明显,延迟时间缩小了69.67%,而进行最优时间延迟补偿后,延迟时间在固定延迟时间补偿的基础上又缩小了34.22%。说明给出的计算方法对通用航空集成航电系统的GPS延迟时间估算有效。
4 结束语
针对通用航空集成航电系统GPS延迟时间特点,研究了精确测量GPS信号延迟的方法,为通用航空集成航电系统ACR时间和GPS时间同步提供更多理论支撑和技术手段。提出延迟时间的几种计算公式,根据可测量时间的不同,给出相应计算公式的有效使用时机;对不可测量的部分,利用卡尔曼滤波进行最优化估算处理;最终将可测量时间和最优化处理后的未知时间相加,得出相对精确值;通过模拟仿真试验证实了该方法的有效性。
猜你喜欢
煤气与热力(2021年3期)2021-06-09 06:16:22
湖南邮电职业技术学院学报(2020年3期)2020-10-13 04:40:50
交通运输系统工程与信息(2020年1期)2020-02-28 02:56:28
山东冶金(2019年5期)2019-11-16 09:09:38
电子制作(2019年7期)2019-04-25 13:18:30
人生十六七(2016年14期)2016-12-01 05:24:26
中国塑料(2016年8期)2016-06-27 06:35:02
电子产品可靠性与环境试验(2016年6期)2016-05-17 03:52:22
设备管理与维修(2016年7期)2016-04-23 06:51:46
现代农业(2015年1期)2015-02-28 18:40:09