Tikhonov正则化广义最小化求解振动速度
2021-07-30 09:54:34吕宝华余才志
测控技术 2021年7期
吕宝华, 王 鹏, 余才志
(1.中航机载系统有限公司,北京 100028; 2.天津大学 精密测试技术与仪器国家重点实验室,天津 300072)
随着电子工业技术的快速发展,越来越多的高精密生产及检测设备对环境微振动有着较高的要求,尤其对环境微振动的低频振动幅值的要求甚高[1-3]。一些特殊类型的高精密设备,其制造厂商会提供对应的振动允许值,也就是防微振指标;若未提供相应指标,可根据其生产或检测精度按照通用微振动标准进行评估[4-6]。现行标准包括由我国自行提出并遵循的GB51076-2015《电子工业防微振工程技术规范》以及国际通用振动评价标准。
国际标准与我国国标规定的振动标准及大多数厂商提出的防微振指标均是用振动速度的幅值高低来对环境振动进行评估,但由于振动传感器的安装以及指标参数等因素,直接使用振动速度传感器难以实现低频微振动测量,因此需要选用低频高灵敏度的振动加速度传感器获取加速度信号后,通过数字信号积分算法,重建振动速度信号。
1 Tikhonov正则化
已有的数字信号积分算法主要分为时域积分和频域积分两大方向[7-8]。时域积分主要是通过滤波或多项式拟合等方法在去除低频噪声及趋势项后,对时域信号进行数值积分得到振动速度信号,但由于环境微振动的目标频率也就是基频往往较低,滤波器设计难度较大,且会出现相位失真等现象。频域积分主要包括低频截止和低频衰减等积分算法,对低频噪声抑制以及趋势项控制方面表现良好,但其积分得到的时域速度信号是经过IFFT后各个频率平均后的结果,因此无法很好地再现随机振动信号的瞬时特性。鉴于已有的信号积分方法存在的种种不足,在环境微振动测试领域迫切需要一种既可以再现振动信号时域瞬时特性,又可以在有效抑制低频噪声的情况下尽量保留低频信息的数字信号积分算法。
本文提出一种基于Tikhonov正则化[9-11]的广义最小化求解的振动速度重建方法,克服现有积分算法存在的不足,在有效抑制低频噪声的情况下尽量保留低频信息的数字信号积分算法,可以较好地再现振动信号的时域瞬时特性;并且该方法可通过调节广义化阶数和正则化因子来适应不同的测量环境,适应性强;该方法在实际应用中,仅需进行简单的向量乘法运算,并且不同积分窗的计算是相互独立的,可通过多线程并行计算提高算法速度,可编程性强。
2 Tikhonov正则化的基本原理
基于正则化方法的振动速度重建过程主要包含:建立模型、正则化求解及最优化正则化参数的选取和收敛准则[12-16]几个步骤。
2.1 系统模型的建立
建立Tikhonov正则化误差控制方程的连续形式[17]为
(1)

将测量误差(需要求解的速度的微分与测量加速度的差)的最小化问题进行广义化处理,转化为求解高阶导数的差的最小化问题,则积分广义误差控制方程形式为
(2)
式中,ng为广义化阶数。
(3)
并且取先验估计vst为0,对式(2)使用变分法求极值:
0=δmin∏(v)
(4)
式中,E即为误差控制方程构造的目标函数。
对式(4)进行连续分布积分,整理可得:
(5)
对式(5)微分得到:
(6)

(7)
2.2 正则化参数求解
正则化参数的选取一向是 Tikhonov 正则化方法最为关键的一部分。如果所选参数过大,系统就会丢失大量有效信息;如果选取的参数过小,虽然系统保留了很多信息,但在受到外部环境噪声影响的情况下,正则化方法对此时的动态载荷识别不能起到很好的抑制作用。如何选取也就成为重点问题。


(8)
式中,fi为每组加速度对应的频率。构建误差计算公式:
(9)
由此建立在不同广义化阶数ng下,可以通过调整正则化因子λ来使误差达到系统允许误差。
2.3 收敛准则
由梯形积分公式可得积分形式广义误差控制方程离散化形式:
(10)

由Lagrange插值多项式(11):
(11)
可得数值微分公式为
(12)
将式(12)代入式(10),经整理可得L2广义误差控制方程:
(13)
T与采样间隔Δt有关。式(13)中系数矩阵K=Ki·Kc;微分系数矩阵Kc为代入数值微分公式后,经整理得到;如果式(13)小于一个容差值,则称该迭代收敛。
3 重建振动速度算法
首先用Tikhonov正则化的广义最小化求解方法建立Tikhonov正则化误差控制方程的连续形式(简称IGEC方程),通过对该方程进行变分法以及傅里叶变换推导出理想加速度(通过本算法计算出的加速度)与测量加速度的传递函数,进行误差计算后选取最佳结果,确定广义化阶数与正则化因子。再对该方程进行离散化计算推导,得到离散形式的误差控制方程(简称LGEC方程),对其进行求解得到速度重建系数向量。最后,用积分窗对测量加速度进行截取,将截取得到的测量加速度向量与速度重建系数向量作向量乘法运算,即可得到积分窗中心时刻的重建加速度,继续移动积分窗重复上述步骤,即可完成振动速度重建。算法流程如图1所示。

图1 算法流程框图
4 实验与结果分析
为了验证微振动测量系统及其信号处理算法的可行性和测量准确度,本文设计、搭建了微振动在线测量系统进行实验的系统,对多个半导体厂房进行了微振动现场测量分析。实时采集得到的加速度数据如图2所示。
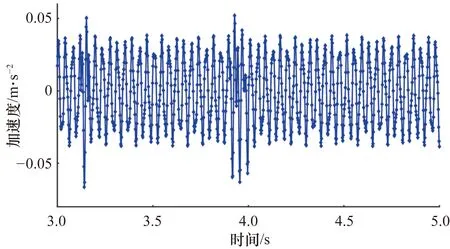
图2 测量加速度图
由本文算法计算得到不同广义化阶数下幅频响应曲线如图3所示。从图3中可看出,广义化阶数取值越高,本文提出的算法的低频抑制范围将扩大。而不同的测量环境,其需要抑制的低频趋势项误差对应的频率范围各不相同,因此可通过调整广义化阶数修正重建信号基线,保证积分精度。
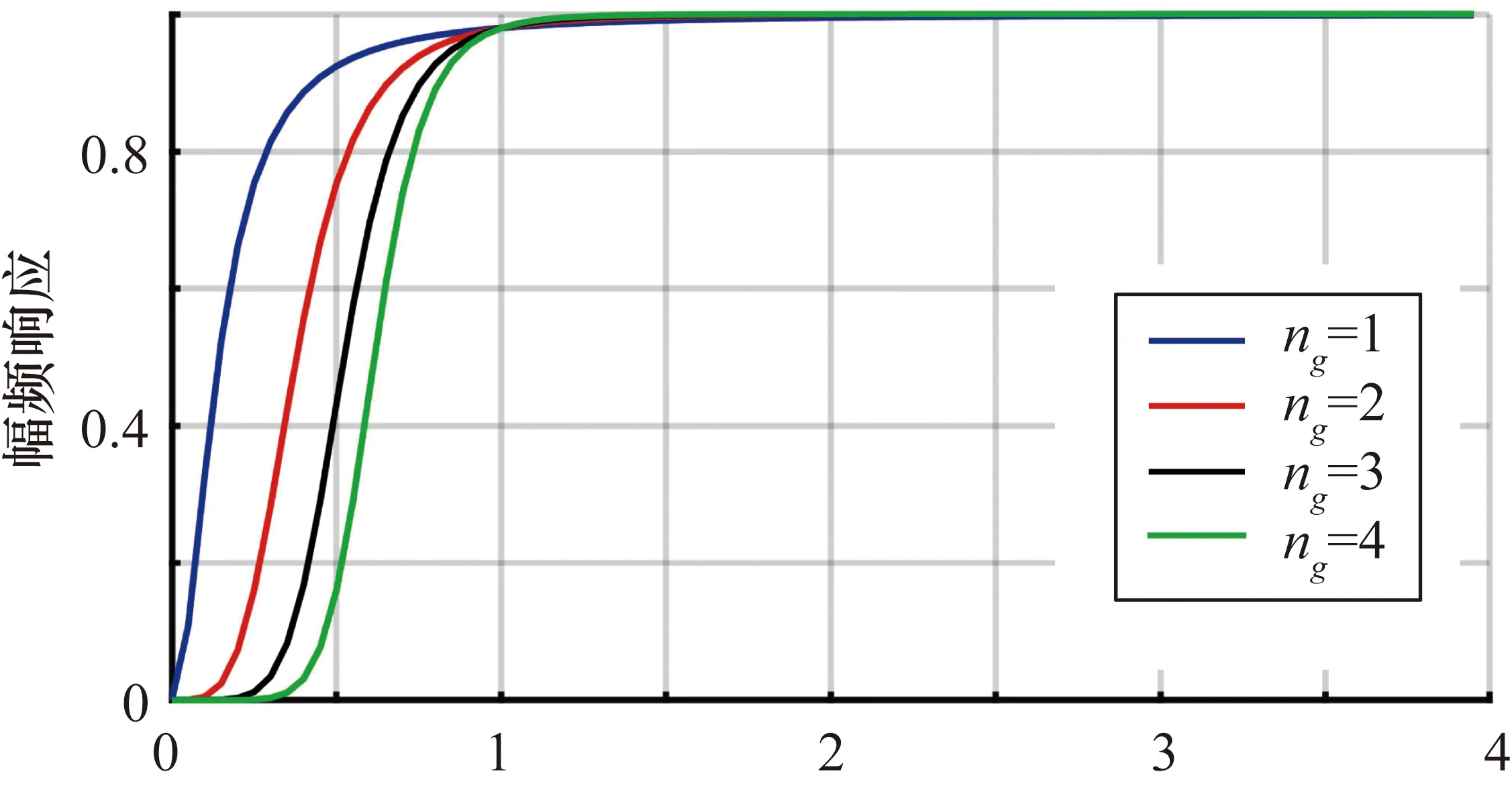
图3 不同广义化阶数下幅频响应图
由本文算法计算得到不同正则化因子下幅频响应曲线如图4所示。

图4 不同正则化因子下幅频响应图
算法积分过程示意图如图5所示。

图5 积分过程示意图
带噪加速度即为不去除低频趋势项噪声情况下使用理想频域积分方法得到,如图6所示。
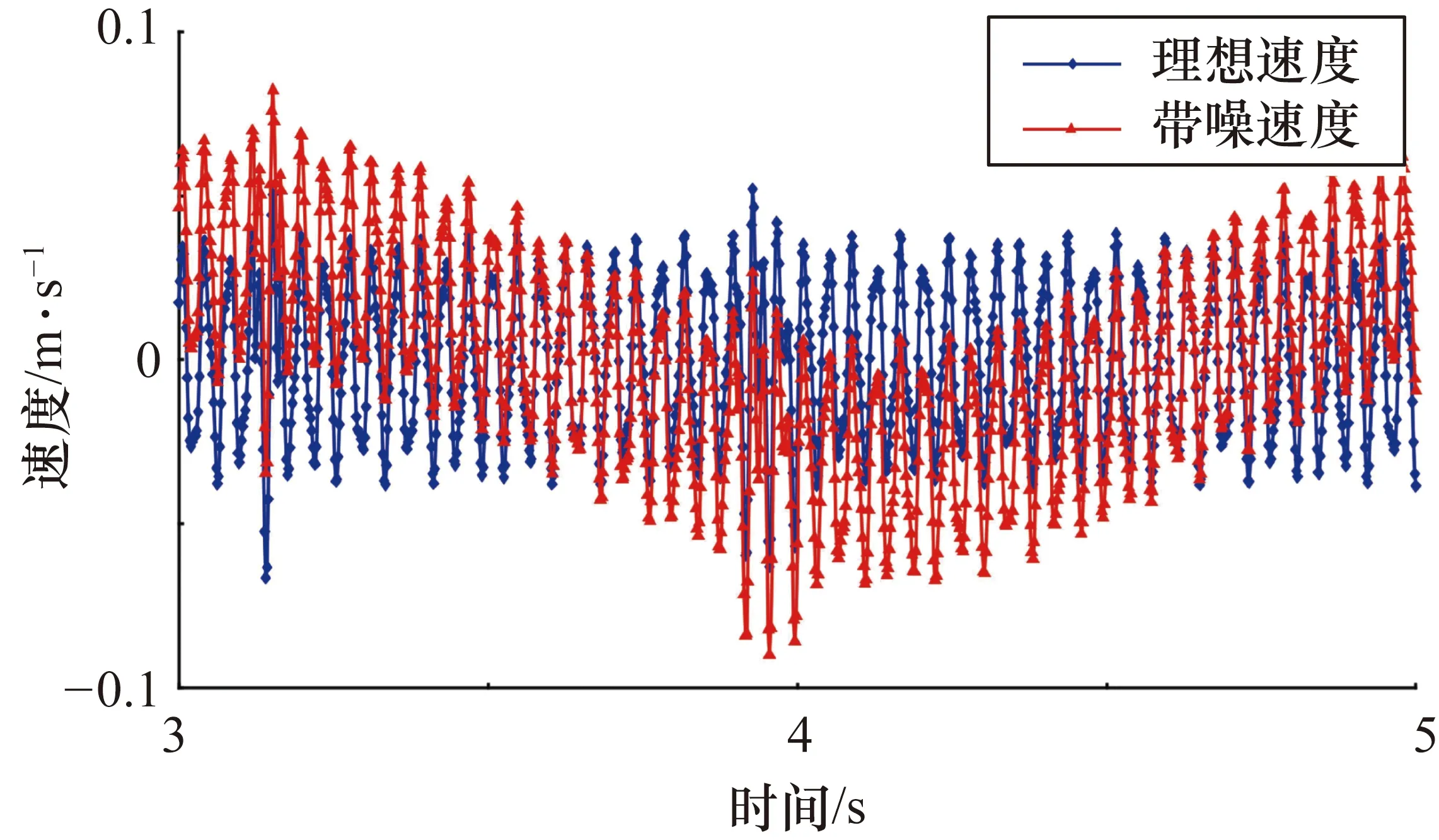
图6 带噪速度示意图
算法计算重构的速度与实际速度对比图如7所示。可以看出,低频趋势项噪声得到了较好的抑制。
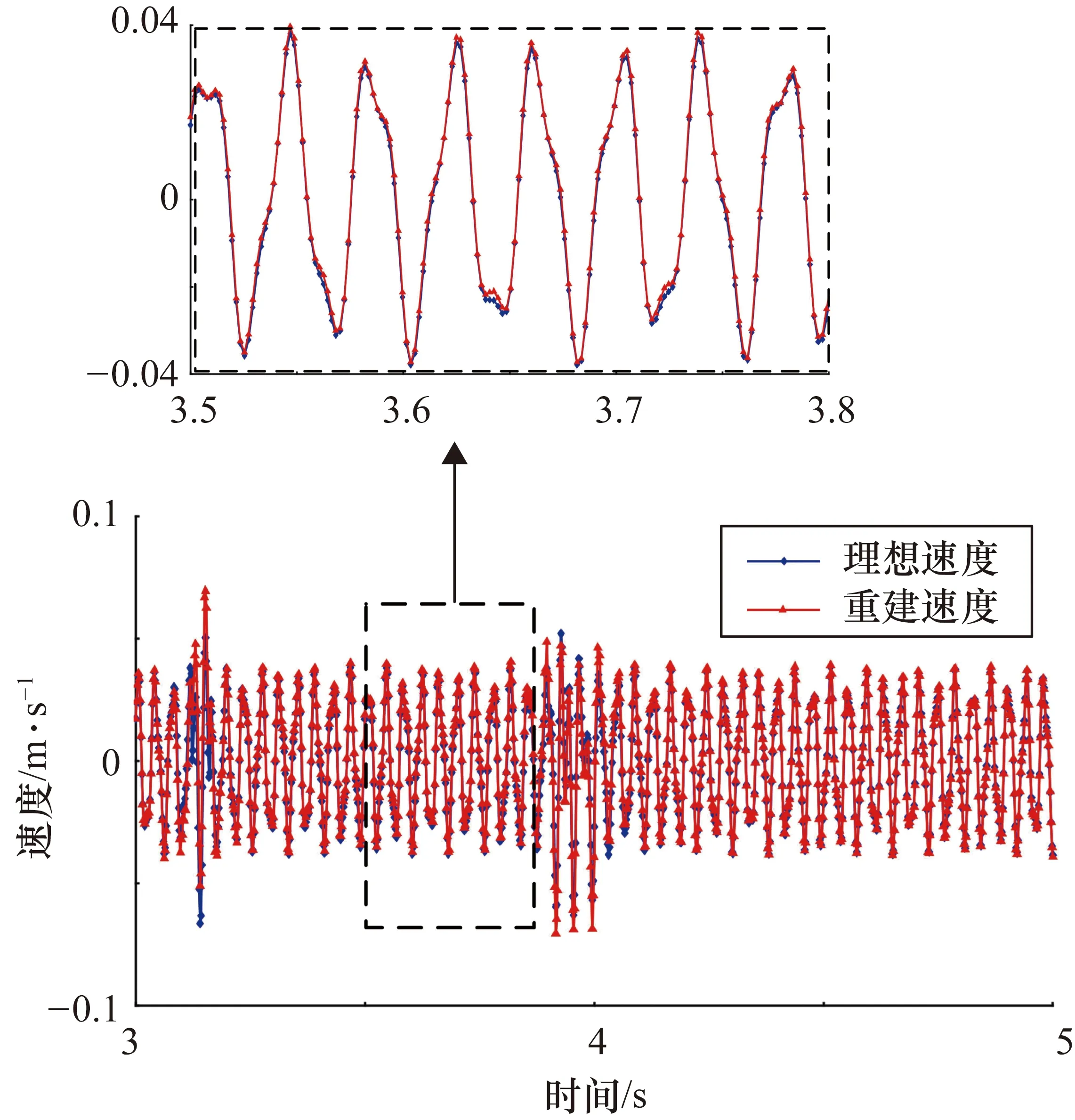
图7 理想速度与重建速度对比图
5 结束语
针对高精密生产及检测设备的环境微振动测量,需要用振动速度评价环境的振动等级。本文提出一种基于Tikhonov正则化的广义最小化求解的振动速度重建方法,克服了现有积分算法存在的不足,该方法在实际应用中,仅需进行简单的向量乘法运算,并且不同积分窗的计算是相互独立的,可通过多线程并行计算提高算法速度,可编程性强。通过实验证明,该算法可以有效抑制低频噪声,并且尽量保留低频信息。
猜你喜欢
当代水产(2022年6期)2022-06-29 01:12:20
数学物理学报(2022年3期)2022-05-25 13:33:00
中国中医急症(2019年10期)2019-05-21 07:20:28
数学年刊A辑(中文版)(2019年1期)2019-01-31 02:35:44
汽车观察(2018年12期)2018-12-26 01:05:42
金桥(2018年4期)2018-09-26 02:24:46
数学杂志(2018年5期)2018-09-19 08:13:48
劳动保护(2018年8期)2018-09-12 01:16:14
数学年刊A辑(中文版)(2016年2期)2016-10-30 01:46:38
数学年刊A辑(中文版)(2014年5期)2014-11-01 05:43:38