
直升机载空地导弹俯仰姿态方案通用设计方法
2021-07-30 03:27王妮芝
弹箭与制导学报 2021年3期
马 菲,杨 凯,许 琛,何 轶,王妮芝
(西安现代控制技术研究所,西安 710065)
0 引言
直升机载空地导弹是从直升机上发射的攻击地面目标的导弹,是武装直升机的主要进攻武器,可执行近距离空中支援、战场空中遮断、压制防空作战、攻击敌方纵深地域有价值目标等作战任务[1]。
直升机载空地导弹发射离轨至命中目标,弹道可以分为初始段、中制导段与末制导段。其中初始段主要作用是稳定导弹弹体姿态;中制导段的主要作用是控制导弹弹体位置和姿态,控制导弹沿弹目瞄准线定高飞行,确保导引头捕获目标;末制导段的主要作用是控制导弹按设计的比例导引律飞行,实现对目标的精确打击[2]。
弹道初始段俯仰通道一般采用姿态控制,其主要作用是稳定弹体姿态,抑制系统扰动,控制导弹按期望的姿态方案飞行,并在初制导段与中制导段交接过程中满足弹体姿态和导弹位置的平稳过渡[3]。
文中提出了一种适应直升机载平台大发射高度范围的空地导弹俯仰姿态方案通用设计方法,可以简化初制导段方案爬升控制数表设计的复杂程度,解决传统俯仰姿态多数表设计方案不能很好适应直升机载平台下发射包络的技术难题。
1 传统俯仰姿态方案设计方法
传统的直升机载空地导弹俯仰姿态方案一般根据不同发射高度及中制导启控方案分段设计,形成多组控制数表,并根据不同的发射高度在多组数表的不同分段区间内进行插值及参数补偿[4]。由于导弹的发射高度在一定区间变化,如果控制数表数量过少,导致在不同发射高度下初制导方案爬升段弹道一致性较差,甚至出现弹道不满足总体设计要求和作战使用要求的现象,而增加控制数表数量会增大俯仰姿态方案设计的复杂程度。因此传统的直升机载空地导弹俯仰姿态方案设计一般最少存在5组以上的控制数表,对弹载计算机的存储容量及读取数表速度有一定的要求,不利于工程实现,同时对直升机载平台的发射包络有一定的限制,不利于作战使用[5]。
2 新型俯仰姿态方案通用设计方法
直升机载空地导弹俯仰姿态方案的设计主要考虑导弹发射高度包络、初始弹目相对关系、中制导弹道规律启控点要求,同时考虑导弹的飞行姿态、攻角的稳定性以及初制导段与中制导段导弹姿态、弹道的平稳衔接,并结合地形、发动机点火时间等作战因素[6]。
针对导弹发射高度包络及中制导弹道规律启控点需求,俯仰姿态方案通用设计方法,根据导弹发射高度、初始弹目相对关系、导弹初始俯仰角及中制导弹道规律启控点需求等,通过设计一组控制数表和插值方案即可适应不同发射高度的导弹俯仰姿态爬升,实现姿态角从射角到中制导段平飞角度的平稳过渡,实现导弹初始段方案爬升和中制导段弹道高度的平稳衔接[7]。
2.1 中制导弹道规律启控点预设高度设计
中制导段弹道方案一般根据导弹中制导段高度控制启控时刻导弹高度和中末交接段导弹高度约束条件规划某种弹道方案,导弹按照此预设的弹道规律飞行。中制导弹道规律启控点预设高度设计需要考虑中制导弹道规律及中制导启控点处导弹姿态角和弹道的衔接等问题[8]。
根据中末交接段导弹预设高度H0与载机发射高度yzj的关系,设计中制导弹道规律启控点预设高度H1。当发射高度小于中末交接段导弹预设高度H0时,将中制导弹道规律启控点预设高度H1设定为H0;当发射高度大于等于中末交接段导弹预设高度H0时,将中制导弹道规律启控点预设高度H1设定为载机发射高度yzj,即:
(1)
2.2 俯仰姿态方案基准控制数表和修正控制数表设计
俯仰姿态方案通用设计方法的一项重要内容就是设计一组控制数表,包括基准控制数表和修正控制数表。其中基准控制数表保证导弹爬升到基准高度,修正控制数表是在基准控制数表上的一个相对修正值,让导弹在基准高度上再爬升一个相对高度。
2.2.1 基准控制数表的设计方案
首先,根据导弹瞬时受力平衡和力矩平衡原理,设计平衡重力的方案爬升段姿态控制信号ϑg,计算公式为:

(2)

其次,根据需要的基准爬升方案设计弹道倾角规律,作为方案爬升段姿态控制信号θ*,θ*为时间的分段线性函数。


(3)
2.2.2 修正控制数表的设计方案

2.3 任意海拔高度下的控制数表组
利用上述方法分别设计0 m海拔高度下的控制数表组f1(x)和6 000 m海拔高度下的控制数表组f2(x)。任意海拔高度下的控制数表组可根据实际作战海拔高度在两组控制数表组之间插值得到:
(4)
其中yhb为本机海拔高度。
2.4 任意海拔高度下不同弹道模式的俯仰姿态方案信号
利用已设计得到任意海拔高度下的基准控制数表和修正控制数表,根据不同的发射高度在修正控制数表上进行插值修正,叠加到基准控制数表上,形成俯仰姿态方案信号,即可适应不同发射高度的弹道方案需求,保证导弹进入中制导时,导弹纵向位置在设定的中制导弹道规律启控点预设高度H1附近。
根据导弹发射高度yzj、中制导弹道规律启控点预设高度H1与基准控制数表使导弹爬升的高度的偏差,设计修正控制数表的比例系数Ky,工程应用中一般设计Ky是yzj的分段线性函数。
(5)
(6)
3 俯仰姿态方案通用设计方法数学仿真
3.1 设计算法举例
以某型直升机载空地导弹为例,验证俯仰姿态方案通用设计方法。
3.1.1 基准控制数表设计
首先,按照式(2)设计平衡重力的方案爬升段姿态控制信号ϑg;其次,根据需要的爬升方案设计弹道倾角规律,作为方案爬升段姿态控制信号θ*。爬升方案设计弹道倾角规律θ*为时间的分段线性函数,特征点值为:


3.1.2 修正控制数表设计
3.1.3 发射高度修正系数设计
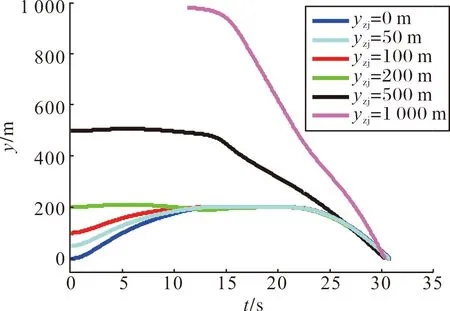
根据不同发射高度yzj和中末交接段导弹预设高度H0,确定中制导弹道规律启控点预设高度H1,进而确定发射高度修正系数Ky。当yzj 以中末交接段导弹预设高度H0=200 m为例,设计发射高度yzj在0 m,100 m,200 m,300 m,500 m,1 000 m处的发射高度修正系数Ky,其他发射高度下的修正系数可通过特征点插值得到。 Ky是yzj的分段线性函数,特征点值为: yzj0=[0,100,200,300,500,1000]; Ky0=[2.4,1.6,0.8,-1.0,-1.0,-1.0]。 以某型直升机载空地导弹为例,通过数学仿真验证俯仰姿态方案通用设计方法的有效性。图1为不同发射高度下导弹俯仰姿态方案信号,图2为在此俯仰姿态方案信号下的导弹纵向弹道。可见,在直升机载空地导弹不同发射高度下,此俯仰姿态方案通用设计方法可以使得导弹在中制导开启时刻到达中制导弹道规律启控点预设高度附近。 图1 不同发射高度导弹俯仰姿态方案信号 图2 不同发射高度导弹纵向弹道 在常规空地导弹俯仰姿态方案设计思路和方法的基础上,提出了一种俯仰姿态方案通用设计方法,可满足不同发射高度、不同中制导段启控点弹道高度的要求,其突出优点是根据初始发射条件,完成姿态方案信号的智能规划设计,既有利于初始段的姿态稳定,又能实现姿态控制与高度控制平稳过渡。此方法简化初制导段方案爬升控制数表设计的复杂程度,解决了传统俯仰姿态多数表设计方案不能很好适应直升机载平台下发射包络的技术难题,可应用于不同发射高度的直升机载空地导弹的俯仰姿态方案领域,具有较大的推广应用空间。3.2 数学仿真

4 结论
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
弹道学报(2021年2期)2021-07-05
宇航计测技术(2021年6期)2021-04-19
学生天地(2020年3期)2020-08-25
兵器知识(2020年8期)2020-08-12
兵器知识(2018年2期)2018-02-08
诗选刊(2015年4期)2015-10-26
