
基于跟踪信息的多帧联合检测方法
2021-07-27 08:37:02刘红亮
系统工程与电子技术 2021年8期
刘红亮, 陈 超, 岳 凯
(1.北京无线电测量研究所, 北京 100854;2.电子信息控制重点实验室, 四川 成都 610036)
0 引 言
随着近几年微弱目标的逐渐增多,雷达目标探测技术正面临着巨大的挑战,如何最大程度地提升微弱目标的探测跟踪性能成为现有装备性能提升的重要研究方向[1-2]。从系统设计的角度,提高微弱目标探测性能最直接的手段是增大发射功率和扩展天线孔径,但通常受到作战场景和使用环境等诸多因素的制约;另外,也可通过增加相参积累时间来提高该类目标检测性能[3-6],但对于预警监视雷达而言,为保证责任空域的长期有效覆盖,同时兼顾分类识别、距离高分辨等重点事件[7],雷达时间资源通常非常有限,因此增加积累时间将会面临着时间受限、性能提升不足的问题。另一方面,一味地增加积累时间还会导致目标回波的相参性降低,也就是说,尽管雷达发射具备相参性的脉冲信号,但接收的回波信号在脉间的相参性已经较差,最终会给脉冲积累造成损失。
根据连续多帧获取的雷达回波数据进行联合检测,实现沿不同搜索帧周期的目标能量积累,也称为检测前跟踪(track before detect,TBD)技术,可以提高信噪比较低的微弱目标的检测能力。检测前跟踪技术的核心思想是提取连续多帧的目标回波数据进行联合处理,通过非相参积累达到提高微弱目标探测性能的效果。实现检测前跟踪的典型方法主要包括以下几种:三维匹配滤波器方法[8-9]、多级假设检验方法[10]、基于霍夫变换的检测前跟踪方法[11-13]、基于粒子滤波的检测前跟踪方法[14-16]、基于动态规划的检测前跟踪方法[17-21]等。
现有多帧联合检测技术主要针对雷达搜索阶段进行设计,该阶段以预警监视为主,因此通常不具备关于监视区域内目标的任何先验信息,为了抑制雷达系统的虚假点迹和虚假航迹的产生,通常需要采用较高的多帧联合检测门限。然而对于完成航迹起始之后的目标跟踪期间,系统已经具备了充分的目标有无和目标状态信息,若仍旧采用搜索期间较高的多帧联合检测门限,将会显得过于严格,不利于稳定跟踪。此时可以针对性地设定较为宽松的多帧联合检测策略,实现目标检测和虚假航迹抑制的折中处理。基于目标跟踪滤波器提供的状态信息,可以预测目标在下一个时刻可能出现的区域,即建立预测波门,最终的多帧联合检测将体现为预测波门内回波信号的积累检测。目前已有很多文献讨论如何解决预测波门内的单帧检测问题,一部分研究工作是从最小化目标跟踪误差的角度来设计波门内的最优检测门限[22-26];还有部分研究工作是利用跟踪信息对下一时刻的预测概率密度函数设计贝叶斯检测器[27-29];另外,还有一些研究工作从航迹恒虚警的约束条件下设计调整单帧检测的门限,以实现检测跟踪的互补提升[30]。
本文基于跟踪信息设计了预测波门内的多帧联合检测方法,核心思想是,首先利用当前时刻跟踪信息建立下一时刻的预测波门,然后设定较低的单帧检测门限保持预测波门内出现虚警的概率恒定,以保证微弱目标信号的高概率检测,同时也对虚警进行适当剔除,最后在航迹恒虚警约束下调整多帧联合检测门限,从而完成航迹确认。仿真实验表明,所提方法可以获得更好的检测性能,以及更高的跟踪维持性能。
1 问题描述
多帧联合检测模型可以表示为
(1)
式中:ξi表示第i帧的单帧检测统计量;η表示联合检测门限;H1表示目标存在的假设;H0表示目标不存在的假设;N表示联合检测的积累帧数。在上述检测模型下,虚警率定义为
(2)
当目标建航之后,系统已经基本可以确定目标的存在,此时在多帧联合检测环节利用跟踪信息将有利于提高系统的检测性能。对于强目标而言,采用逻辑起始方法便可快速建航,但对于微弱目标而言,可采用霍夫变换方法或者TBD方法等,通过搜索期间的多帧联合处理提高建航成功率。本文的出发点在于目标建航成功之后,通过跟踪信息的利用,提高目标检测性能,进一步提升航迹稳定跟踪能力,对于强目标,尤其是远离雷达飞行的目标,可进一步推远跟踪距离,对于微弱目标,可提升微弱目标的稳定检测跟踪能力。
2 多帧联合检测方法
(3)
式中:Fk|k-1表示第k-1时刻至第k时刻的状态转移矩阵;Qk|k-1表示过程噪声协方差矩阵,用于描述目标运动模型中的过程噪声强度。

(4)
式中:Hk表示第k时刻极坐标转换函数hk(·)的雅可比矩阵。由于式(4)用来描述状态预测在极坐标系中的不确定度,并未设计到雷达观测的过程,因此不考虑观测噪声。
综合上述信息,预测波门的约束条件为
(5)

目标跟踪阶段,点航关联环节需要选取预测波门内真实性最高的点迹作为目标点迹进行航迹滤波处理。若针对预测波门的信号不进行单帧检测,将会出现较多的虚警,增大点航关联的负担,降低正确关联概率。同时为保障微弱目标信号能够单帧检测成功,需要设定较低的单帧检测门限,实现点航关联性能和微弱目标单帧检测性能的折中。典型的单帧检测门限设置策略为:基于单帧检测模型,按照给定微弱目标信噪比条件下的检测概率需求,获得单帧虚警概率及其对应的单帧检测门限。
下面按照航迹恒虚警的准则,调整多帧联合检测门限η。考虑如下航迹撤销准则:若连续M帧的预测波门内多帧联合检测统计量低于联合检测门限,则删除该目标航迹。进一步假设目标信号能量变为0,则经过M个搜索周期之后目标航迹仍然存在的概率为航迹虚警概率,记为PF。
设第i个搜索周期单帧检测的虚警概率为Pf,i,对应的检测门限为γi,则预测波门内出现虚警的概率PZ,简称帧虚警概率,可以表示为
PZ=1-(1-Pf,i)Ni
(6)
式中:Ni表示预测波门内的检测单元个数。
为控制预测波门内出现虚警的数量,令不同搜索周期的PZ保持一致,进一步航迹虚警概率PF可表示为
(7)
对于常见的单元平均恒虚警(cell average-constant false alarm rate, CA-CFAR)检测方法,单帧检测统计量体现为
(8)
式中:yi表示第i帧经过预处理(匹配滤波、脉冲积累等)后的待检测回波数据;rm表示第m参考单元预处理后的回波数据;Nc表示参考单元个数。

在H0假设条件下,待检测回波数据yi和参考单元回波数据rm均服从复高斯分布,因此单帧检测统计量ui服从F分布,具体形式为
(9)
若令zi=1+ui,则zi的概率密度函数为
(10)
式(10)说明随机变量zi服从帕里托分布。对zi进一步变换,令ξi=Nclnzi=Ncln(1+ui),则ξi将服从指数分布,并且均值为1。
(11)
将式(11)代入式(7)便可获得满足航迹虚警概率约束条件的联合检测门限。
传统的多帧联合检测方法,主要是针对预警监视的大空域进行设计,由于没有目标信息,若想控制虚假航迹数量在较低水平,必须设定较高的检测门限。然而,本文方法充分利用了跟踪信息,将传统的预警监视区域内的多帧联合检测转变为预测波门内的多帧联合检测,尽管较低的联合检测门限,仍然可以将虚假航迹控制在较低的水平,检测门限的降低可大幅提高微弱目标的检测能力,进一步提升连续稳定跟踪能力。
另外,理论上多帧联合检测方法属于一种批处理方法,而本文所提方法约束了帧虚警概率,进一步考虑到跟踪过程中预测波门通常涵盖的检测单元个数较少,因此经过单帧检测后波门内虚警可以得到有效的抑制,采用诸如最近邻类的方法便可成功提取真实点迹,最终转换为一种顺序处理方法,避免了批处理较大的计算负担。
3 仿真实验与性能分析
实验参数设置:工作频点为800 MHz,发射带宽为2.5 MHz的线性调频信号,方位分辨率为4°,雷达搜索数据率为8 s,预测波门大小取为4;目标初始位置为距离80 km、方位60°,以100 m/s的恒定速度沿雷达径向背站飞行。另外目标的散射截面积为第一类起伏模型,航迹删除准则为若连续3帧的预测波门内多帧联合检测统计量低于联合检测门限,则直接删除该航迹。航迹滤波采用扩展卡尔曼滤波方法实现,点航关联采用最近邻方法,本文多帧联合检测的帧虚警概率为0.05,航迹虚警概率为0.01,传统多帧联合检测仍然基于本文的双门限处理框架,与本文多帧联合检测的区别仅在于联合检测门限的不同,联合检测虚警概率为10-6。
假设目标在飞行过程中信噪比保持10 dB不变,分析传统多帧联合检测方法与本文所提方法的跟踪结果,如图1所示,可以看出本文所提方法针对预测波门内设计的多帧联合检测策略可以大幅度提升跟踪距离。
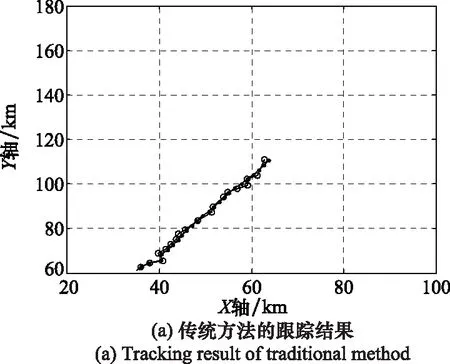
图1 不同方法的跟踪结果
为进一步分析本文所提的多帧联合检测方法对跟踪性能的改善,定义跟踪维持概率,指的是目标航迹能够稳定跟踪到某个特定信噪比或者某个特定距离时的平均概率。此时假设目标初始位置(距离80 km、方位60°)的信噪比为20 dB,仍然以100 m/s的恒定速度沿雷达径向背站飞行,后续时刻的信噪比按照距离四次方衰减。经过500次蒙特卡罗仿真,基于上述假设分析跟踪维持概率与距离的变化关系,如图2所示。分析跟踪维持概率与信噪比的变化关系,如图3所示。

图2 稳定跟踪概率随距离变化
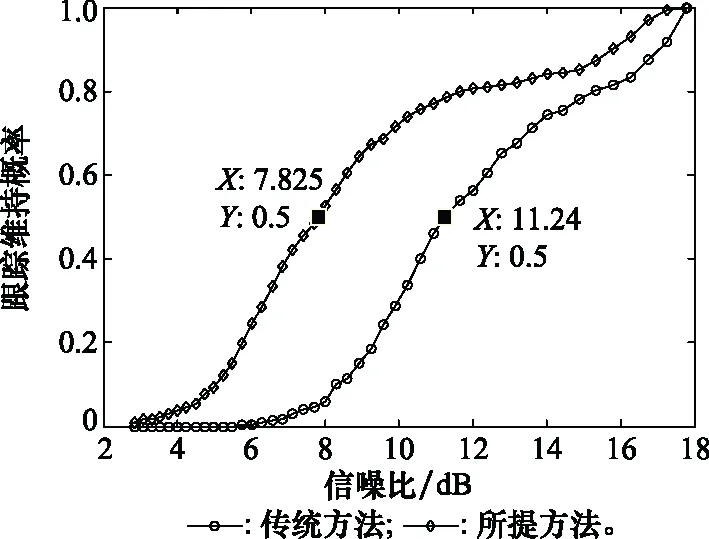
图3 稳定跟踪概率随信噪比变化
观察图2,当跟踪维持概率要求为0.5时,传统多帧联合检测方法对应的稳定跟踪距离仅为115.9 km,本文所提多帧联合检测方法可将有效跟踪距离沿拓至141.1 km。通过图3可以进一步看出,若跟踪维持概率要求为0.5,传统多帧联合检测方法的信噪比要求约为11.24 dB,本文所提多帧联合检测方法的信噪比需求仅为7.825 dB。因此,多帧联合检测策略经过调整之后,可将信噪比需求降低3.415 dB,可以获得更好的稳定跟踪性能。
为进一步分析本文所提的多帧联合检测方法对于虚假航迹的抑制能力,假设目标在第20帧突然消失,分析航迹在后续帧号存在的概率,如图4所示。
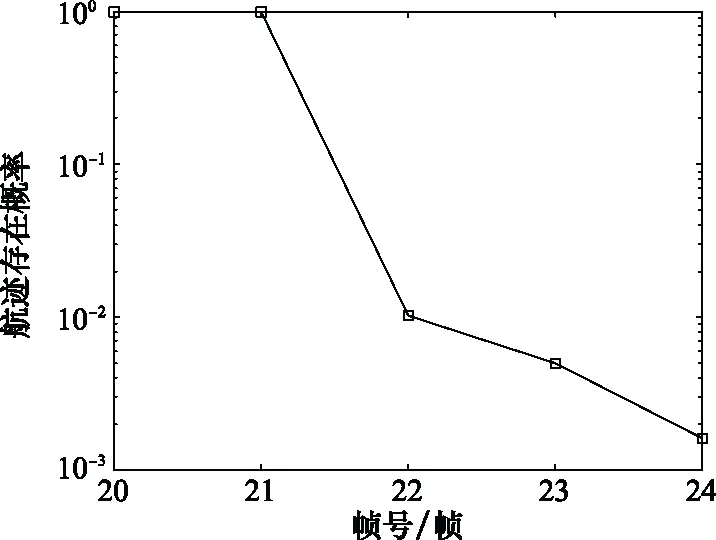
图4 航迹存在概率随帧号变化
通过图4可以看出,若目标在第20帧消失,则经过3帧联合检测后,由于恒定的航迹虚警概率约束了联合检测门限,目标航迹存在概率保持在0.01,并且由于滑窗式的联合检测判决,每当滑动一帧,便可从统计意义上进一步降低航迹存在概率,因此随着观测帧数的逐渐增多,虚假航迹可以很快地被删除,多帧联合检测和虚假航迹抑制实现了良好的折中,提升了对微弱目标的综合探测性能。
4 结 论
本文提出了一种基于跟踪信息的多帧联合检测方法,该方法利用跟踪信息建立预测波门,将传统多帧联合检测方法变换为预测波门内的多帧联合检测。同时,在航迹恒虚警的约束条件下,调整预测波门内多帧联合检测门限,给出了联合检测门限与航迹虚警概率的数学表达式。最后,通过仿真实验验证了该文所提方法对于微弱目标检测和跟踪性能的提升。
猜你喜欢
兵工学报(2022年11期)2022-12-01 12:52:12
汽车实用技术(2022年4期)2022-03-07 06:02:26
中国西部(2021年4期)2021-11-04 08:57:32
华东师范大学学报(自然科学版)(2020年1期)2020-03-16 03:14:55
青年歌声(2019年12期)2019-12-17 06:32:32
物联网技术(2019年9期)2019-11-06 06:24:49
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
科学与财富(2017年24期)2017-09-06 09:52:35
设备管理与维修(2017年1期)2017-04-11 03:21:42
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
