
基于模糊贝叶斯网络的塔吊作业安全风险评估
2021-07-26 05:04王金辉
安全与环境工程 2021年4期
王金辉,郝 伟,陶 泽,韦 丽
(兰州交通大学土木工程学院,甘肃 兰州 730070)
塔吊在各类工程当中的运用极其广泛,许多施工材料都需要塔吊进行调运,在多种施工现场中已成为一种必不可少的设备。但是由于塔吊作业时,塔吊布置数量密集、起吊作业频繁等原因,导致安全事故频频发生,且后果较为严重,时有因为复合原因导致设备损坏甚至人员伤亡的事故发生。因此,开展塔吊作业安全风险评估对于施工现场的安全管理具有重要意义。
塔吊作业安全风险评估是涉及技术、环境和组织的复杂系统问题,国内外学者针对塔吊安全作业问题进行了大量的研究。如Chen等提出了一种在风荷载波动下塔式起重机安全性评估的通用方案,以确保塔式起重机结构的安全,预防倒塌风险的发生;余群舟等通过统计分析塔吊事故,从事故类型、发生时间、发生阶段和直接原因四个方面挖掘了发生塔吊事故的内在因素;Swuste总结了荷兰安全委员会对一起塔吊事故的原因分析,研究了设计缺陷对塔吊安全事故的影响;Dutta等采用基于GPU的并行化方法对CALP系统进行了离散和连续碰撞检测以及路径规划,以防止塔吊间相互碰撞的风险;李刚等对一起塔吊火灾事故的原因进行了分析,并提出了相应的解决措施。
现有的研究多是从某个因素对塔吊安全风险的影响开展研究,而塔吊作业安全问题是一个多层次、多维度的系统问题,一个风险因素可能会导致多个风险事件发生,因此研究系统内部各组分之间的相互关系具有重要的意义。本文全面考虑塔吊作业时导致安全事故的风险事件和风险因素,采用专家调查问卷和模糊理论计算根节点的先验概率,运用概率分配的方法计算中间节点的条件概率,并根据风险因素与各类风险事件之间的因果关系构建贝叶斯网络模型,对塔吊作业的安全风险进行了评估。
1 塔吊作业安全风险评估指标体系建立
识别与分析系统存在的风险因素及风险等级,挖掘指标之间的因果联系和规律性,是建立有效的事故分析模型进而评估与控制风险的基础。本文通过对塔吊作业事故的统计分析,并参考《塔式起重机安全评估规程》等规范,将在役塔吊作业事故按事故类型主要分为倒塌、吊物坠落、碰撞、火灾和电器危险等,各种事故类型的占比见图1,并将其作为塔吊作业安全风险评估指标体系的准则层指标。 根据塔吊作业的工作机理和结构特点,深入分析导致塔吊作业4种事故类型的主要原因,得出塔吊结构部件失效、吊物脱钩、塔吊间相碰撞、电器设备故障等10种塔吊作业风险事件及后果,见表1。
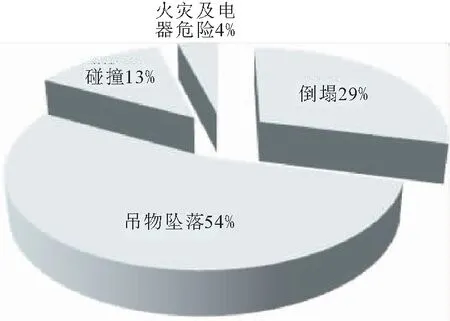
图1 塔吊作业事故类型统计

表1 塔吊作业风险事件及后果
风险事件与风险因素之间并不是一一映射的关系,一个风险事件的发生可能是由多种风险因素造成的,一个风险因素也可能造成多种风险事件同时发生。根据塔吊作业风险事件进一步地识别出塔吊生产厂家资质、政府部门安全监督检查、管理人员安全责任遵守、施工单位安全生产投入等12项风险因素,并分析各项风险因素与风险事件之间的耦合因果关系,见表2。

表2 塔吊作业风险因素与风险事件之间的耦合因果关系
2 基于模糊多态贝叶斯网络的塔吊作业安全风险评估模型构建
塔吊作业风险因素之间的关系错综复杂,贝叶斯网络与回归模型相比,其不仅对线性、可加性等统计假设没有严格的要求,可更形象地描述指标之间的联系,而且能够有效处理变量较多且变量之间存在交互作用的情况,并从大量复杂的数据中发现知识和结构,在得到变量先验概率分布的情况下,通过给定中间节点的观测值,无论连接它们的箭头方向如何,贝叶斯网络都能迅速将信息传递到网络中的各个节点,从而推导出其他变量的后验概率。因此,本文采用贝叶斯网络构建了塔吊作业安全风险评估模型,具体的基于贝叶斯网络的塔吊作业安全风险评估技术路线,见图2。

图2 基于贝叶斯网络的塔吊作业安全风险评估技术路线
2.1 节点状态风险概率等级及确定
贝叶斯网络的节点状态通常分为两种:一种是表示该节点所描述的风险事件发生;另一种是表示该节点所描述的风险事件不发生。然而在现实案例中,节点的状态是模糊的,处于一种中间状态。因此,本文设计了调查问卷,将塔吊作业节点状态风险概率等级划分为5类,具体划分标准见表3。

表3 塔吊作业节点状态风险概率等级划分标准
2.2 节点风险概率计算
为了使塔吊作业安全风险评估结果更加准确,节点的权重听取多位专家的意见并对其进行了适当的整合。由于个人经验和知识的差异,不同专家对于相同的风险事件可能会表达不同的看法,为了实现专家不同观点的一致性,同时降低单个专家主观性的影响,本文采用概率分配和三角模糊数的方法确定节点条件概率表(Conditional Probability Table,CPT)和根节点先验概率表(Priori Probability Table,PPT)。具体步骤如下:
(1) 有n
个专家组成的专家组K
(k
,k
,…,k
),每个子节点对应m
个父节点,按照下式确定每一个父节点对子节点的影响权重并进行归一化处理:
(1)
式中:W
为父节点对子节点的影响权重。(2) 按照下式计算子节点到父节点的加权平均状态距离:

(2)
式中:P
表示父节点的状态;C
表示子节点的状态;s
表示节点的状态。(3) 计算条件概率:常规的条件概率计算公式为
(3)
采用概率分配的方法改进后的条件概率P
计算公式为
(4)
式中:R
为专家给出的结果分布指标。

(5)
式中:a
为该节点状态的最小可能值;b
为该节点状态的最可能值;c
为该节点状态的最大可能值。然后,按照下式计算i
状态下专家给出的三角模糊概率均值:
(6)
最后,按照下式计算根节点的先验概率并进行归一化处理:

(7)
2.3 塔吊作业安全风险评估
根据贝叶斯网络结构及上述公式,运用Matlab软件计算节点的CPT和PPT,导入到贝叶斯网络分析工具Netica软件中,得出每个节点各状态发生的概率,由此可以对塔吊作业安全总体风险进行评估。假设风险必然发生,进行逆向推理,找到关键风险因素,进而可以有重点地对关键风险因素进行控制与管理。
3 案例应用与分析
3.1 案例背景
甘肃某房地产开发公司开发的巨龙·金城御景园项目场地位于兰州市城关区九州片区B464规划路以北,S459规划路以东,B456规划路以西,东侧为罗锅沟高边坡(坡高约为35 m,坡顶距建筑物距离约为10.0 m),该项目总建筑面积为169 194.4 m,用地面积为33 907.30 m,长约268.0 m,宽约128.0 m。
3.2 贝叶斯网络结构
根据建立的塔吊作业安全风险评估指标体系,将各项风险因素与风险事件之间的耦合因果关系运用贝叶斯网络结构来表示,使各风险因素之间的关系更加系统、直观地表现出来,见图3。

图3 塔吊作业安全风险评估的贝叶斯网络结构
3.3 计算节点的条件概率
节点条件概率表是为了量化父节点对子节点的影响效果,即计算当父节点处于不同状态时,子节点状态的条件概率。由于缺少历史数据,本文采用专家调查法来推测节点的条件概率,即根据专家组给出的风险因素权重,按照公式(2)、(4)采用Matlab软件编程进行计算。
以碰撞节点为例,当父节点M
、M
的节点状态为(A
、D
)时,计算得出子节点碰撞A
状态的概率为0.
173 0,B
状态的概率为0.
211 3,C
状态的概率为0.
258 0,D
状态的概率为0.
315 1,E
状态的概率为0.
042 6,见表4。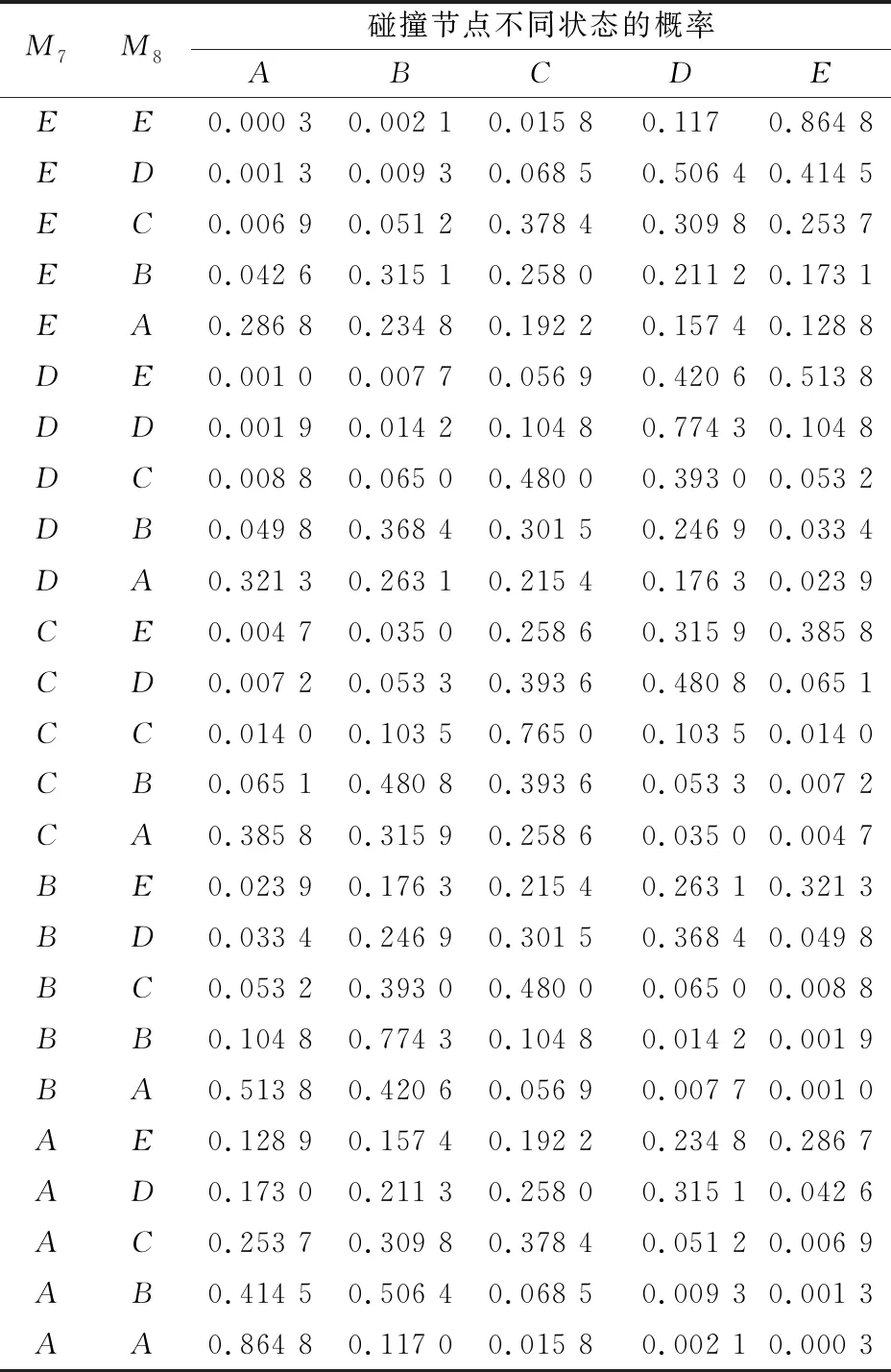
表4 碰撞节点的条件概率表
3.4 计算根节点的先验概率
先验概率是“由因求果”问题中“因”的出现概率,是根据以往经验与分析得到的概率。由7名专家对根节点的状态根据公式(5)给出三角模糊概率,再根据公式(6)和(7)计算出该根节点的先验概率。以X
根节点为例,计算得出X
根节点不同状态的先验概率,见表5。
表5 X1根节点的先验概率表
3.5 塔吊作业安全风险评估结果
在Netica软件中将PPT和CPT录入,得出塔吊作业安全总体风险非常低的概率为20.119%,较低的概率为45.445%,中等的概率为25.747%,较高的概率为7.391%,非常高的概率为1.298%,见图4。对贝叶斯网络进行逆向推理,假设塔吊群发生安全事故,最有可能导致事故发生的关键风险因素依次为政府部门安全监督检查X
、施工单位安全生产投入X
和管理人员安全责任遵守X
。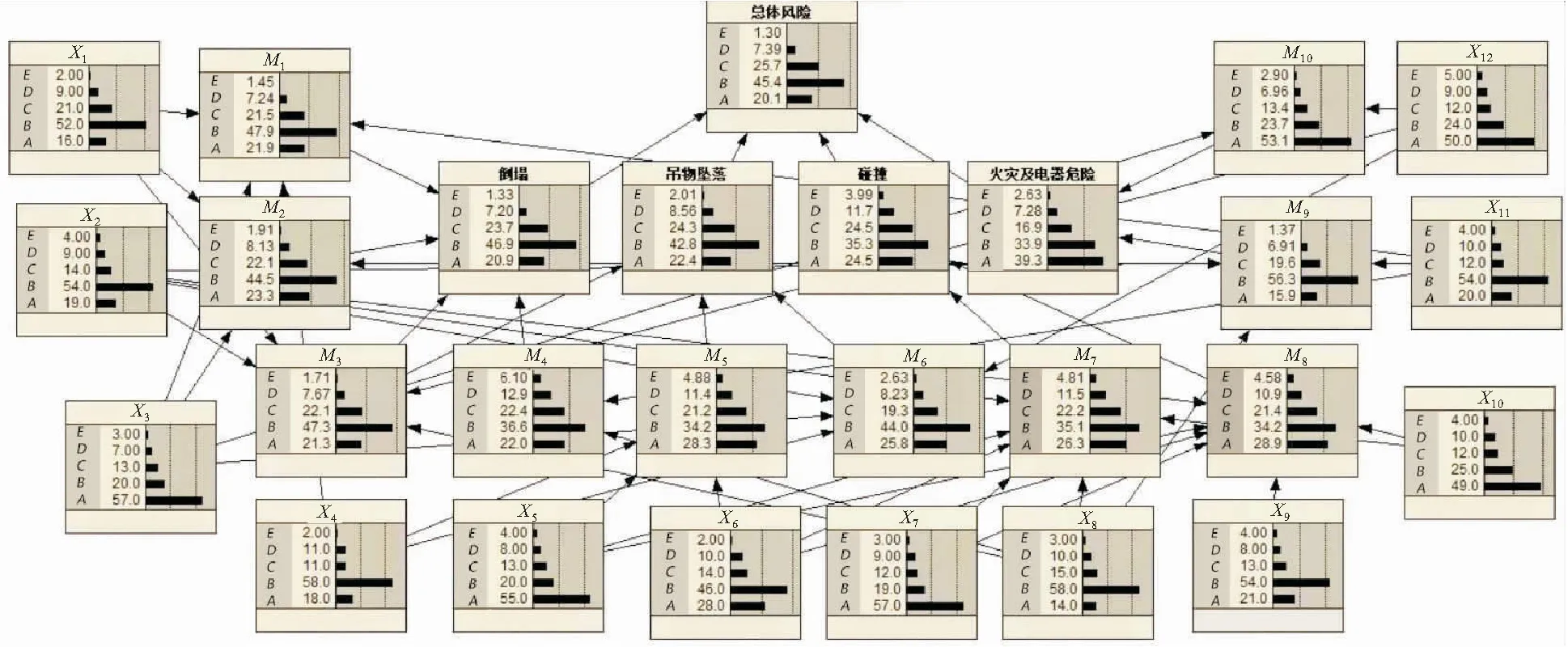
图4 基于模糊多态贝叶斯网络的塔吊作业安全风险评估
3.6 预防措施
根据塔吊作业安全风险评估的结果,本文提出了如下有针对性的预防措施:
(1) 政府安全监管时要将与生产一线人员交流沟通也作为一种考察方式,从与员工交流和沟通工作中更能了解生产现场中可能存在的深层次问题和安全管理上的漏洞。
(2) 施工单位要强化安全教育培训,转变思想认识,营造良好的安全生产氛围。尤其对安全投入责任的划分,要严格按照体系程序运行,从而将安全投入工作进行常态化管理。
(3) 切实加强管理人员安全生产责任制,不仅要在岗前组织安全教育和安全学习,而且在施工过程中也要不断强化管理人员的安全责任意识,并制定一系列的奖惩措施。
4 结 论
(1) 塔吊作业安全受多种风险因素的影响,通过全面分析塔吊作业安全系统,从倒塌、吊物坠落、碰撞、火灾及电器危险4种事故类型中,识别出10种风险事件、12项风险因素与频发的事故类型之间的关系,建立了基于模糊多态贝叶斯网络的塔吊作业安全风险评估模型,提高了塔吊作业安全风险评估的准确度。
(2) 根据评估结果得出塔吊作业安全总体风险非常低的概率为20.119%,较低的概率为45.445%,中等的概率为25.747%,较高的概率为7.391%,非常高的概率为1.298%,与案例实际情况相符,从而证明了该模型具有一定的可靠性和可行性。
(3) 塔吊的结构部件及附墙装置失效最有可能导致塔吊倒塌事故的发生,通过避免塔吊生产厂家资质存在问题、塔吊日常维修与保养工作不到位、施工单位安全技术交底不到位这些风险因素的出现,可有效地降低塔吊作业倒塌事故发生的风险。
(4) 根据贝叶斯网络的逆向推理得出,政府部门安全监督检查、施工单位安全生产投入和管理人员安全责任遵守对塔吊作业的安全风险有较为明显的影响,为关键风险因素,进而提出具体的应对措施,以为塔吊作业的安全防范工作提供参考。
猜你喜欢
风流一代·青春(2022年4期)2022-04-20
中学生数理化·高三版(2021年3期)2021-05-14
中学生数理化·高三版(2021年3期)2021-05-14
当代工人(2019年19期)2019-11-22
做人与处世(2018年6期)2018-05-21
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
科教导刊·电子版(2017年32期)2018-01-09
数学学习与研究(2017年10期)2017-06-22
农村百事通(2017年2期)2017-02-17
