
中近程无人机卫星导航诱骗及对策
2021-07-25 05:30张雄熊俊胡峰
科技创新导报 2021年6期
张雄 熊俊 胡峰

摘 要:GPS和北斗等卫星导航在无人机导航方面的运用较为普遍,通过介绍卫星定位原理,分析卫星定位误差产生的原因,研究人为制造GPS和北斗卫星定位误差的常规方法,致使无人机飞行中定位不准确。用特定卫星导航干扰、诱骗设备发射刻意加偏的卫星信号,可导致无人机偏航或被诱骗到他人期望地域。针对以上问题,提出中近程无人机综合运用无线电导航、惯性导航、图像匹配、航向航程推算、组合导航等反诱骗方法,提高无人机在复杂环境自主飞行能力。
关键词:无人机 GPS 北斗 卫星导航 诱骗 对策
中图分类号:V279+. 3 文献标识码:A 文章编号:1674-098X(2021)02(c)-0119-05
Deception and Countermeasures of Satellite Navigation for Medium and Short Range UAV
ZHANG Xiong1 XIONG Jun1 HU Feng2
(1. Unit 77115, PLA, Chengdu, Sichuan Province, 611235 China; 2. Unit 61287, PLA, Chengdu, Sichuan Province, 610036 China)
Abstract: GPS and Beidou satellite navigation are widely used in UAV navigation. This paper introduces the principle of satellite positioning, analyzes the causes of satellite positioning error, and studies the conventional method of artificial GPS and Beidou satellite positioning error, which leads to inaccurate positioning of UAV in flight. Using specific satellite navigation interference and decoy equipment to launch deliberately biased satellite signals can lead to UAV yaw or be lured to other people's desired area. In view of the above problems, this paper puts forward some anti deception methods, such as radio navigation, inertial navigation, image matching, course and range calculation, integrated navigation, etc., to improve the UAV's autonomous flight ability in complex environment.
Key Words: UAV;GPS; Beidou; Satellite navigation; Deception; Countermeasure
GPS和北斗等衛星定位在各个领域的应用越来越广泛,其定位精度高、速度快,设备精简、可靠性好,有着其他定位方式无可比拟的优越性,在军民领域发挥了重要作用,无人机主要通过GPS、北斗等卫星导航系统进行定位[1]。但是在复杂电磁环境中,敌人可能采取各种手段对GPS和北斗卫星信号进行干扰和定位参数刻意加偏,导致无人机GPS或北斗接收的定位数据不准确,从而无人机不能按预定航线飞行,甚至被诱骗到不可控地域被捕获,不能有效完成任务。针对无人机新型作战样式及战法研究,已成为一种新的研究方向[2]。当前绝大部分无人机不具备反卫星导航干扰、诱骗能力,自主飞行能力较弱。为满足恶劣的飞行环境,有必要采取合理技术方法提高无人机在紧急情况下自主飞行能力,为完成任务提供可靠保证。
1 卫星定位原理及误差
1.1 卫星定位原理
以GPS卫星定位为例介绍其伪距定位的原理,载波相位定位方式在无人机导航上运用较少不作介绍。GPS卫星工作频率主要为1575.42MHz的L1载波和1227.60MHz的L2载波。在L1载波上主要调制着C/A码(粗码)、星历等参数,定位精度较低,供普通用户使用;L2载波上调制着P码(精码),提供精密定位服务给有限用户使用[3]。普通用户通过接收机同时接收3颗以上卫星广播的星历数据报文,测量GPS卫星发射伪测距码和用户接收到的时间差,从而计算接收机到卫星的距离,根据瞬时星历参数可以计算定位设备的坐标位置。卫星位置(xi,yi,zi)由星历参数提供为已知,通过测量用户到3颗卫星的伪距列3个方程式,就可以计算出接收机的位置(x,y,z)。
R2=(x1-x)2+(y1-y)2+(z1-z)2
R2=(x2-x)2+(y2-y)2+(z2-z)2 (1)
R2=(x3-x)2+(y3-y)2+(z3-z)2
(1)式中R为接收机到卫星伪距,卫星位置为(xi, yi,zi),接收机位置为(x,y,z)。测距伪码通过无线电在空中传播,由于电离层密度、设备精度等原因导致测量的时间不够精确,卫星发出信号到达接收机收到的时间上有一个延时Δt,只要测出接收机与第4颗卫星的伪距,通过4个方程式,就可以解出4个未知量x、y、z、Δt,即可获取接收机的更加精确的位置[3]。那么(1)式就要改为:
R2=(x1-x)2+(y1-y)2+(z1-z)2 +Δt×C
R2=(x2-x)2+(y2-y)2+(z2-z)2 +Δt×C (2)
R2=(x3-x)2+(y3-y)2+(z3-z)2 +Δt×C
R2=(x4-x)2+(y4-y)2+(z4-z)2 +Δt×C
(2)式中C为光束。
1.2 衛星定位误差
卫星定位是通过无线电在空中传播定位参数,接收机解算获取位置。用户在定位时会受到各种不良因素制约,影响用户定位准确度。一是电磁波通过太空和大气层两种分布不均匀的电离层介质传播过程中会产生电磁波折射效应,且由于湿度、温度和气压会影响电磁波传播速度,造成伪码接收时间的延迟,从而产生随机误差。二是敌方可能通过地面注入站人为加入星历误差,或者通过卫星定位伪基站发送加偏定位参数,从而导致位置计算产生人为误差。三是接收机软、硬件设计存在缺陷,影响信号接收、处理精度,软件算法不够科学合理,从而产生系统误差。四是卫星信号发生部分和接收信号处理部分的随机噪声,或者其它外部某些具有随机特性的影响,从而引起的偶然误差。
2 卫星导航及诱骗攻击
卫星导航是接收导航卫星发送的导航定位信号,实时地测定运动载体的在航位置和速度,进而完成导航[4]。卫星导航定位精准,受天候影响较小,能全天时提供实时服务,卫星导航广泛运用于空中和地面快速移动载体的导航。特别是载荷能力较低的无人机,在没有外界人为干扰时,卫星导航手段是最简便、稳定的导航方式。
由于可能存在人为干预,使卫星定位产生误差,利用GPS和北斗伪基站发送延时定位参数报文,使伪距码报文收、发的时间差不正确,从而可以影响的定位坐标准确度。卫星伪基站干扰信号幅度大于正常GPS卫星信号[5],无人机GPS和北斗接收机更容易锁定信号较强的伪基站信号,导致定位存在偏差,使无人机不能按预定航线飞行,也可能被诱骗到不可控制区域。早在2008年,德克萨斯州立大学奥斯汀分校已经研发出GPS诱骗攻击系统[6]。2011年12月,伊朗宣布诱骗俘获一架美国最先进的RQ-170无人隐身侦察机[7]。我国的卫星定位干扰系统也早已在航空管制中广泛运用。
目前常见的基于GPS和北斗卫星导航诱骗技术主要原理如下:(1)首先通过雷达探测车获取目标无人机速度、航向、地理位置等基本参数。(2)计算机控制系统根据无人机运动参数、GPS和北斗卫星导航系统发送的导航信息、诱骗目标位置,设定合理诱骗路径,确定控制策略,控制欺骗误差,防止被无人机导航系统识别。(3)通过伪卫星信号基站发送诱骗信息,无人机锁定诱骗卫星信号,使无人机脱离原始控制,改变飞行姿态和航迹,最终使无人机飞至他人期望地域。其基本原理如图1所示。
3 诱骗干扰的对策
3.1 诱骗干扰的判定
卫星定位诱骗位置如果是发生跃变,位置偏差突然变化较大很容易判别发现。但往往是刚开始偏差量很少,在劫持信号后逐步加大偏差量,诱骗在不知不觉中发生,具有一定的隐蔽性,很难以发觉。诱骗的判定是防御诱骗干扰的关键,不能及时判定被诱骗,无人机误认为伪定位数据是正常的,就可能被诱骗到不可控地域。无人机诱骗可通过以下几种方法判定。一是通过航线航迹比对。飞行中观察飞行参数发现航迹偏差逐步变大,排除自然条件因素外,难以自动纠正航迹偏差且持续变大,此时可人工判断卫星定位可能被人为加偏,导致定位不准确。二是通过锁定卫星判别。卫星导航正常情况下,锁定卫星数一般大于4颗。当操作员在无人机飞行中从导航软件上观察到锁定卫星数为0-2颗,且有定位数据但疑似存在偏差,短时间不能恢复,则可能存在卫星定位干扰源。通过软件检测比对锁定的卫星信号强度,发现突然有超出常规信号强度的信号源时,发出诱骗干扰预警。三是通过星历参数自动验证。导航定位卫星广播发射的星历参数不但有伪距码,还包含卫星轨道信息、姿态信息。通过判别卫星编号(伪随机码PRN码)、倾角、信号方位等参数,检测卫星信号发射的方位,与数据库中真实星历参数比对,可发现信号源的真伪。四是设定空域安全边界管制。根据地形条件和任务需要,设定飞行空域安全范围,当没有误操作时无飞机定位显示趋向或者超出安全边界,卫星定位显示的方位、距离和无线电遥测参数偏差较大,可以判定无人机遭遇诱骗攻击。
3.2 诱骗干扰的对策
在复杂电磁环境中,在卫星导航、无线电导航等被干扰条件下,无人机可采用惯性导航、卫星定位加密、图像匹配、航向航程导航等引导方式脱离干扰区,回到安全区域后可用卫星导航、无线电导航等方式进行修正,确保任务顺利完成和无人机飞行安全。
3.2.1 惯性导航
惯性导航的原理是应用惯性加速度计,在三个垂直的轴的方向上测出质心运动的加速度分量,然后用积分装置将加速度分量积分得到速度分量,再把速度分量积分得到坐标分量[8]。惯性导航对外部条件依赖度低可自主导航,具有较强的抗干扰能力。但是由于惯导系统采集的参数本身就有误差,积分计算也有误差,导致计算坐标位置不准确,推算的后续坐标误差会不断积累前面的误差,误差量随时间推移不断增大。
3.2.2 卫星定位加密
北斗三号全球卫星导航系统正式开通,是我国独立自主建设的卫星导航系统,能在全球范围提供精准的定位和导航服務。通过对北斗导航电文加密,接收机使用特定密钥才能解码,导航电文不能被篡改和诱骗,提高卫星定位导航的安全性,难以对无人机实施诱骗干扰。
3.2.3 无线电导航
通过无线电技术能对飞行中的无人机进行测向和测距,可以确定飞机精确位置。无线电导航可分为地面固定导航台和无人机地面控制站链路导航等方式。地面导航台在大型有人机上运用较多,导航技术较为成熟,频段分布较广,也可根据需要在无人机任务航线上临时架设专用加密导航台(站)。在无人机上加装导航台无线电设备,复杂电磁环境中,在无人机地面站链路频段被干扰情况下,通过地面导航台频段可以进行校正和辅助导航。
3.2.4 图像匹配导航
图像匹配主要有地形轮廓匹配和景象匹配等方式。地形匹配是利用机载雷达、无线电测高仪、气压高度表等实时采集高度数据,计算出航线投影到地面的剖面高程,与机上预先存储的网格化数字地图高程数据通过批相关算法比对,从而确定飞行器的位置,适合于起伏明显的丘陵和山地导航。景象匹配是将事先预先制作或飞行器实时采集的可见光、红外、SAR图像与机上存储的网格化二维数字影像进行相关计算确定位置,适合的起伏不大的平坦地区导航。景像匹配导航分辨率高、自主导航、体积小等显著优点在精确导航领域受到越来越多的重视,成为未来无人机自主导航飞行的最主要方式之一[9]。中国航天科技集团公司一院12所通过合成孔径雷达景象匹配导航技术,实现无人机自主航线规划和导航。
3.2.5 航向航程导航
磁航向传感器自主性工作较好,无人机距地面较高不容易受到大范围的干扰。当无人机在空中飞行时,及时判定存在卫星干扰诱骗、定位失败等现象后,此刻时间很短,无人机位置变化不太大,通过定位失效前的坐标位置推算出当前位置,以当前位置和地面站位置计算出方位角和距离。按计算出的方位角、距离和预先设定高于区域内障碍物的应急安全高度定向飞行,以惯性导航辅助计算速度和航程,直线返航到地面站附近的安全区域,在空中盘旋等待卫星定位和链路恢复,从而控制无人机继续执行任务或降落。
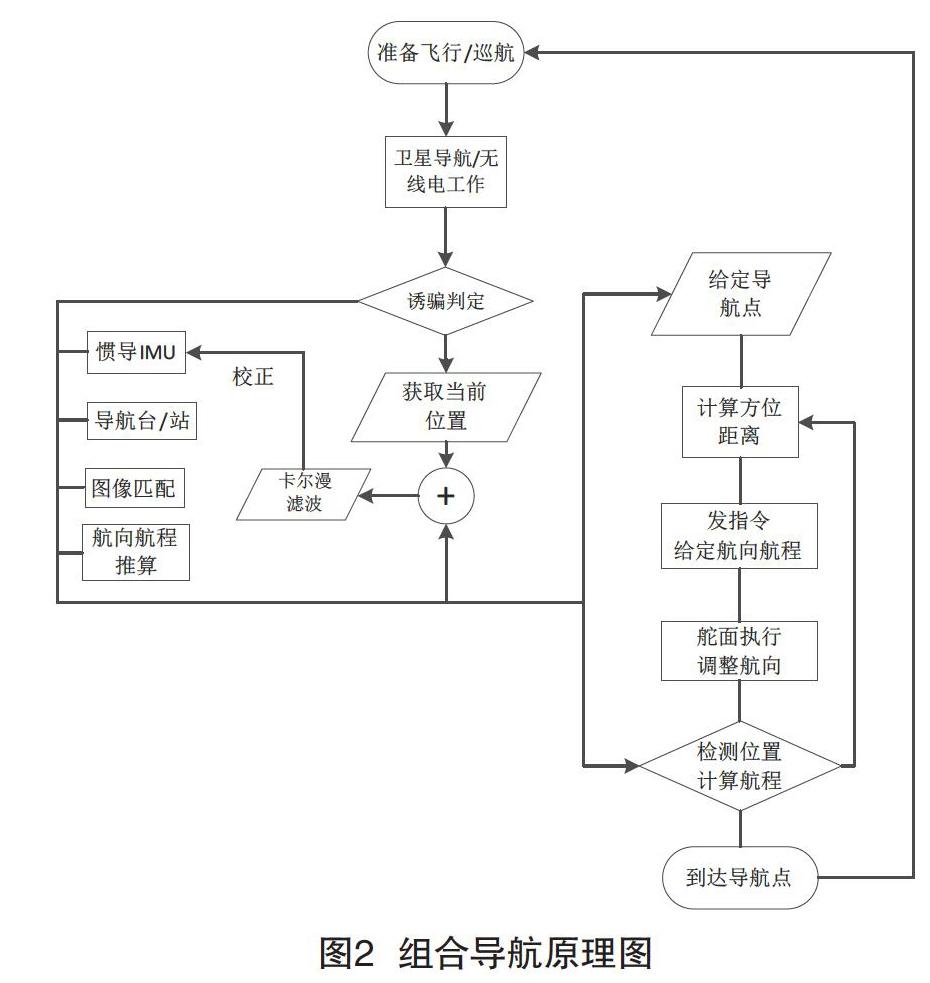
4 组合导航设计
组合导航的精度是导航系统的重要指标[10],卫星导航和惯性导航是无人机常用的组合导航方式,在卫星定位和无线电链路失效时,惯性导航得不到补偿校正,航迹偏差随着时间推移越来越大。通过增加导航台站、图像匹配、航向航程推算等辅助导航方式,可进一步增强中近程无人机在遇到GPS、北斗和无线电干扰情况下自主飞行能力,应对未来可能遭遇的卫星导航失效或者诱骗。组合导航原理图如图2所示。
导航方式优先级依次为卫星导航、无线电导航、惯性导航、导航台站导航、图像匹配导航、航向航程导航。无人机能够获取卫星定位、无线电正常工作情况下,通过卡尔漫滤波器反馈校正其它导航模式位置。无线电链路和卫星导航被干扰后,通过导航台站、图像匹配等方式,修正惯性导航,通过超紧组合导航滤波器优化设计[11]成果可以进一步提高组合导航精度。在判定无线电链路和卫星导航被干扰时,达到预先设定时间门限,无人机立即进入应急模式自主导航返航,脱离干扰区域,进入安全区域后,及时尝试恢复无线电链路和卫星导航。应急返航可分为按直线和按航线两种方式返航。从失控点直线返航要考虑航线中的障碍物,需要预先设定安全高度。直线返航飞行中姿态变化少,测定参数准备确,误差较小,适合距离较近情况下采用。航线返航是沿着起飞前设定航线返回,适合距离较远、地形复杂时采用。
5 结语
每一种导航方式都各有优缺点,单一的导航方式都存在一定蔽端。无人机主要运用了惯性导航、卫星导航、无线电导航等方式组合导航,提高无人机导航稳定性和可靠性。当遇到诱骗、干扰情况时,目前无人机自主导航能力普遍较弱,抗干扰能力不强,受外界条件制约较大。随着科学技术的发展,可将导航台站、图像匹配、航向航程导航等自主性较好的导航方式与当前常用的卫星导航、无线电导航、惯性导航等模式进行组合。以地磁、光学为基础的导航系统发展日新月异[12],光流导航、视觉导航等技术日趋成熟完善,为中近程无人机自主导航方式提供了更多的解决方案。通过多种自主性较强的导航方式组合,中近程无人机能更加自主、智能应对可能存在的卫星、无线电等干扰,进一步提高中近程无人机在复杂电磁和恶劣战场环境中的生存能力。
参考文献
[1] 万成浩.无人机视觉定位的景象匹配算法研究[D].北京:信息工程大学,2018.
[2] 吴长柯,侯强.无人机GNSS诱骗与反诱骗技术论述[J].全球定位系统,2020,45(3):37-40.
[3] 袁建平.卫星导航原理与应用[M].北京:中国宇航出版社, 2003.
[4] 刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2003.
[5] 颜靖华,侯毅,宋滔,等.基于GPS诱骗的低空民用无人机干扰技术研究[J].中国电子科学研究院学报,2019,14(6):618-624.
[6] Clouds.详解GPS诱骗:针对导航系统的致命攻击[EB/OL],2016-09-13,https://www.freebuf.com/articles/ wireless/114249.html
[7] 李文盛.["坎大哈怪兽"的"楚门世界"]美国RQ-170缘何坠落[J].兵器知识,2012(3):41-45.
[8] 张年松,曹兵.弹药制导与控制系统基础:Elements of munition guidance and control systems[M].北京:北京理工大学出版社,2015.
[9] 李耀军,潘泉,沈贺,等.无人机景象匹配辅助导航仿真系统设计与实现[J].火力与指挥控制,2011,36(7):114-118.
[10] 邱伟,王立扬,司成,等.SINS/GNSS卡尔曼滤波组合导航技术在运载火箭上应用研究[J].上海航天,2016,32(B05):66-70.
[11] 张希, 缪玲娟, 沈军,等. GPS/INS超紧组合导航滤波器的优化设计[J]. 北京理工大学学报, 2018, 38(1):102-107.
[12] 张海,吴克强,张晓鸥.视觉导航技术的发展[J].导航定位与授时,2017(2):1-8.
猜你喜欢
军事文摘(2023年20期)2023-10-31
小哥白尼(神奇星球)(2022年3期)2022-06-06
中学生数理化·七年级数学人教版(2021年11期)2021-12-06
江苏安全生产(2020年3期)2020-04-21
当代陕西(2019年18期)2019-10-17
云南教育·中学教师(2019年6期)2019-08-13
基层中医药(2018年11期)2019-01-31
人间(2016年26期)2016-11-03
太空探索(2016年3期)2016-07-12
