
纯电动汽车驾驶平顺性研究
2021-07-22 03:11:24高力杨依楠
汽车实用技术 2021年13期
高力,杨依楠
(1.华晨汽车工程研究院新能源工程处,辽宁 沈阳 110411;2.华晨汽车工程研究院电控工程处,辽宁 沈阳 110411)
前言
传统车辆由于传动系统扭振会引起车辆在前后方向上的振动,这种现象在电动车上更明显。由于纯电动车辆使用的是电机,较之发动机在低速下转矩更大,所以振动会更加明显,而且电机响应速度比发动机快,当驾驶员猛踩加速踏板时,由于扭振的作用给驾驶员驾驶性方面的体验会更差[1]。针对上述问题,本文提供一种在不牺牲动力响应能力的基础上,改善车辆驾驶平顺性的控制方法。
1 车辆动态的分类
车辆驾驶平顺性主要关注车辆在 X轴方向加速度的变化,所有纯电动车辆在X方向的动作大致可以分为如下几个方面:换挡、电爬行、起步、加速、减速、定车速,这些项中换挡的权重最大[2],也是用户对车抱怨最多的地方。这些项又可继续拆分很多子项,例如可以将加速分为缓慢加速、紧急加速、倒档加速等。把其中的一个子项继续细化,可得到一些关系到驾驶感受的指标,如加速延迟、加速度线性度、冲击、高频震荡等。
2 驾驶员动作的分类
驾驶员操作汽车,在直线行驶时挂在D挡,驾驶员如果不踩制动踏板,只踩加速踏板,驾驶员操作行为大致分为三种。
2.1 kickdown
在极短的时间将加速踏板踩下去,加速踏板开度 0%到100%耗时不到1 s的时间,加速踏板变化率超过100%/s,我们称为tip-in,踩下去造成直接降档,我们称为kickdown。
2.2 rising pedal
在较短的时间将加速踏板踩下去,加速踏板从 0%踩到100%耗时1 s到2.5 s之间,加速踏板变化率介于40%/s~100%/s之间,称为rising pedal。
在较长的时间将加速踏板踩下去,加速踏板从 0%踩到100%耗时3 s到6 s之间,加速踏板变化率小于33%/s,也称为rising pedal[3]。
3 驾驶平顺性评价方法
汽车驾驶平顺性的评价方法,通常是根据人体对振动的生理反应及保持货物完整性的影响来定制的,并用振动的物理量,如频率、振幅、加速度、加速、变化率等作为行驶平顺性的评价指标。目前常用汽车车身振动的固有频率和振动加速度评价汽车的行驶平顺性。为了保持汽车具有良好的行驶平顺性,车身振动的固有频率应为人体所习惯的步行时,身体上、下运动的频率[4]。它约为1 Hz~1.6 Hz,振动加速度极限值为0.2 g~0.3 g。
4 驾驶平顺性总体方案
首先获取车辆电动机的当前扭矩和需求扭矩,根据这两个扭矩判断是否触发预设的平滑过渡条件,当判断结果为是时,根据预设传动系统平滑过渡扭矩目标值,控制电动机的扭矩从当前扭矩以渐近线式变化规律变化。其中,所述预设传动系统平滑过渡扭矩目标值为车辆抖动产生扭矩临界值。
4.1 触发条件
触发平滑过渡条件包括:电动机当前扭矩小于所述结合点预设值,或电动机当前扭矩与需求扭矩方向相反。
4.2 信号采集
获取车辆电动机的当前扭矩和需求扭矩的步骤包括:获取车辆电动机的当前扭矩、当前驾驶模式、车速和加速踏板开度,然后根据当前驾驶模式、车速和加速踏板开度计算出需求扭矩,从而获取车辆电动机的当前扭矩和需求扭矩。
4.3 驾驶平顺性详细控制策略
当传动系统达到KissPoint(结合点)时,控制电动机扭矩从KissPoint过渡到需求扭矩,然后输出需求扭矩。使传动系统实现“传动间隙-刚性链接”的平滑过渡。比如当电动机扭矩换相时,首先控制电动机输出小扭矩实现传动系统的平滑过渡,保证车辆的驾驶平顺性,当传动系统完成平滑过渡后,输出驾驶员需求扭矩,保证车辆的动力响应能力,在不牺牲动力响应能力的前提下,大幅提升驾驶平顺性[5]。
踏板开度大小表明了驾驶员对扭矩的请求多少,VCU(Vehicle Control Unit,整车控制单元)中有专门的软件可以将当前驾驶模式、车速和加速踏板开度转化成驾驶员需求扭矩,基本的规律是随着踏板开度增加,请求扭矩增加,扭矩大小直接反映了驾驶员对动力的需求。
传动系统平滑过渡扭矩目标值为车辆抖动产生扭矩临界值,根据电动机当前扭矩T与驾驶员需求扭矩TTarget的变化识别驾驶员需求,判断是否触发平滑过渡条件,实现平滑过渡。当驾驶员需求满足触发平滑过渡条件时,将驾驶员TTarget拆分为传动系统平滑过渡扭矩 TShift和驱动输出扭矩TDrive两部分。其中,TShift使传动系统间隙以最快速度消除同时不产生刚性冲击, TShift包含从电动机的当前扭矩以渐近线变化规律变化的扭矩目标值集合,它的最大值为车辆抖动产生扭矩临界值,TDrive包含电动机的扭矩达到平滑过渡后从达到平滑过渡的扭矩变化到需求扭矩的目标值集合,TDrive目标值在数值上等于TTarget,这个拆分是为了拆分扭矩执行的阶段控制。假如电动机当前扭矩 T为-80 N,TTarget为110 N,将TTarget拆分成传统系统平滑过渡扭矩目标值2 N,即车辆抖动产生扭矩临界值为2 N,驱动输出扭矩目标值即需求扭矩110 N。
TShift的大小和变化规律对传动系统的结合效果即传动的平顺性起关键作用, TShift的最大值为车辆抖动产生扭矩临界值,然后以该值作为目标值通过变化率限制产生“先快后慢”的渐近线式变化规律,实现传动系统的平滑过渡[6]。扭矩差值为车辆电动机的当前扭矩和预设传动系统平滑过渡扭矩目标值的差值;通过一阶低通滤波器对目标值的趋近特性实行渐近线式变化,如图1所示,电动机当前扭矩与预设传动系统平滑过渡扭矩目标值偏差越大,变化率越大,电动机当前扭矩与预设传动系统平滑过渡扭矩目标值偏差越小,变化率越小。以2 N为目标值控制电动机扭矩从-80 N以渐近线式变化规律变化,实时更新电动机扭矩。
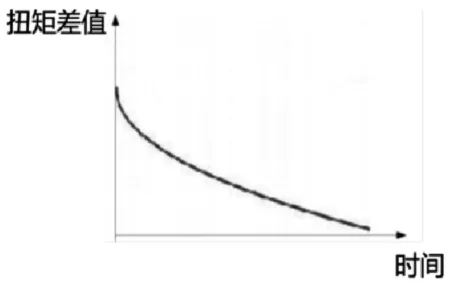
图1 扭矩差值随时间变化图
平滑过渡过程耗时仅为毫秒级别,在不牺牲动力响应能力的前提下大幅提高驾驶平顺性,有效地解决了车辆动力响应能力与驾驶平顺性的矛盾。驾驶平顺性不再是车辆动力响应标定的瓶颈,此外还能有效减少传动系统磨损,延长使用寿命。
5 结论
采用平滑过渡控制策略在不改变纯电动汽车传动系统硬件的情况下,通过软件控制,把驾驶员的需求扭矩与车辆的传动特性完美地结合,使得即使驾驶员在极短的时间内将加速踏板踩下,传动系统仍然能够平滑过渡,保证了车辆的驾驶平顺性,真正让“人-车”成为一体,一个好的驾驶平顺性的车辆不仅让用户抱怨减少,让车辆变得更有价值。
猜你喜欢
疯狂英语·读写版(2023年12期)2023-02-20 18:41:06
中国造纸(2022年8期)2022-11-24 09:43:38
一重技术(2021年5期)2022-01-18 05:42:12
电子产品世界(2021年5期)2021-02-09 21:40:08
装备制造技术(2020年2期)2020-12-14 03:09:28
今日农业(2019年12期)2019-08-15 00:56:32
电子制作(2018年10期)2018-08-04 03:24:26
浙江中西医结合杂志(2013年4期)2013-11-08 03:43:20
Chinese Journal of Cancer Research(2013年2期)2013-06-12 12:33:54
中共合肥市委党校学报(2012年2期)2012-08-15 00:47:06
