
隐身飞机自适应功率自卫式干扰
2021-07-20 08:57:14刘明杰王春阳
探测与控制学报 2021年3期
刘明杰,王春阳,谭 铭,包 磊
(1.空军工程大学研究生院,陕西 西安 710051;2.空军工程大学防空反导学院,陕西 西安 710051;3.国防科技大学信息通信学院,湖北 武汉 430019)
0 引言
在现代的作战力量当中,空地对抗力量一直是世界各国武器装备发展的重点,其中就包括空中突防飞机与地面防空雷达。随着武器技术的发展,隐身技术逐渐被应用到空中突防武器当中,其中隐身飞机因为其“看不见”的隐身特性成为现代战场中的主战兵器。隐身飞机在突破地面雷达防御的过程中除了运用隐身性能保护自身外还通常对地面雷达释放电子干扰来保障突防的安全性。但是隐身飞机在对地面雷达释放干扰的时候,地面的无源侦察雷达就有机会对干扰信号进行侦察截获。当隐身飞机辐射的干扰信号被地面的无源雷达成功截获时,无源雷达就能够对空中的隐身飞机进行定位,这等于隐身飞机释放的干扰信号使自己主动暴露在空间中,弱化了自身的隐身特性。因此,飞机在实际飞行过程中经常会控制干扰信号功率的释放,减小被无源雷达设备截获的可能性,提升自身的隐蔽距离,并起到节约干扰功率资源的作用。
文献[1—8]建立了机载电子干扰的模型,并结合隐身飞机动态RCS序列的获取方法,研究了隐身电子战飞机对雷达性能的影响;文献[9]提出了用信号的截获概率来表征飞机射频隐身特性的方法,但并没有提出实际的功率控制干扰形式;文献[10]提出了自卫电子对抗下的射频隐身,并提出了以压制比和信干比为边界的功率管控方法,但没有结合实际飞机突防进行考虑,且文中提出的功率控制方法是以实时估计飞机与雷达间的距离为基准的,实际应用难度较大;文献[11]提出了预测雷达回波功率的干扰功率自适应办法,但针对的只是普通飞机,并没有结合隐身飞机。
针对目前的相关研究存在未将功率控制与隐身飞机实际突防结合的主要问题,本文借鉴文献[1—8]中的隐身飞机的隐身性能分析方法和自卫式干扰模型,结合文献[9—11]中的功率控制方法与评估模型,建立了隐身飞机的自适应功率自卫式干扰模型,并对该种干扰方式的干扰有效性和飞机隐蔽性能提升的有效性进行了合理评价。
1 隐身飞机自卫式干扰模型
考虑如图1所示的空地对抗场景:隐身飞机为执行己方制定的作战任务突破地面防空雷达的防御。当隐身飞机进入到地面雷达的探测范围时,飞机发现了有威胁性的地面雷达发射的探测信号,此时飞机利用自身的干扰设备对地面雷达释放电子干扰,掩护自身安全突防。
图1中,Rj是隐身飞机进行自卫干扰的干扰距离(雷达和隐身飞机的实时空间位置),Rmax是地面雷达探测隐身目标的最大作用距离。
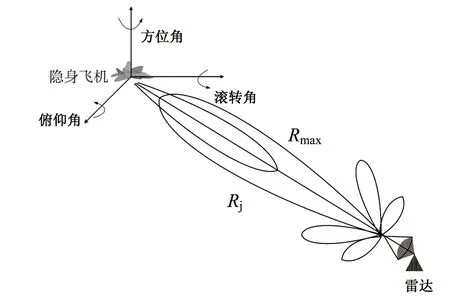
图1 隐身飞机自卫干扰场景Fig.1 Self-defense jamming scenario of stealth airc
1.1 隐身飞机隐身性能分析
隐身飞机在突防过程中的RCS是姿态角的敏感函数,而飞机的姿态信息是飞机在空间中的方位角、俯仰角、滚转角的联合反应,因此目前常用的获取隐身飞机动态RCS的方法是建立隐身飞机飞行航迹模型,解算飞机的即时方位、俯仰二维姿态信息,然后结合隐身飞机静态RCS数据库提取对应航迹下的隐身飞机动态RCS序列。
隐身飞机静态RCS数据库是利用FEKO仿真软件仿真计算出的某型隐身飞机全空域静态RCS数据库。
1.1.1航迹模型设置
隐身飞机的飞行航迹设定为空中侧站盘旋飞行航迹,飞机具体的初始设置如下:
1)保持盘旋状态的滚转角η始终为30°;
2)保持盘旋状态的仰角δ小于5°;
3)隐身飞机具有超声速、高空巡航能力。
隐身飞机侧站盘旋航迹参数设置具体如表1所示。
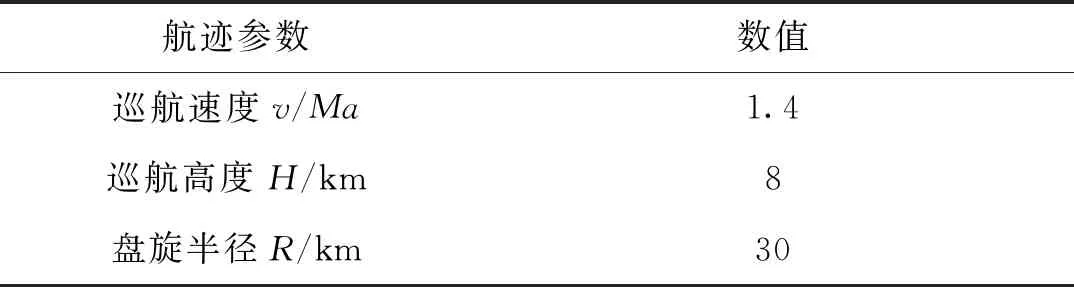
表1 航迹参数设置Tab.1 Trajectory parameter setting
依据航迹参数设置,隐身飞机的飞行状态及地面雷达在三维直角坐标系中的空间位置关系如图2所示。
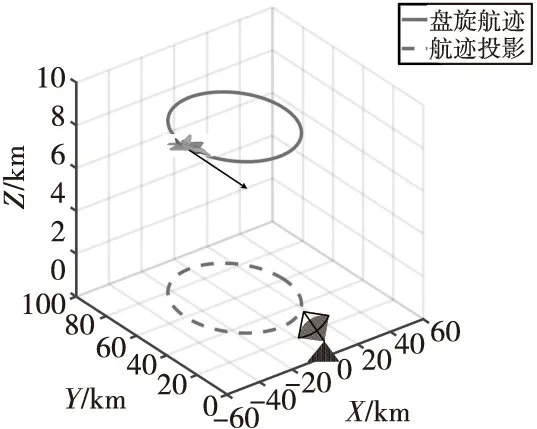
图2 侧站盘旋航迹Fig.2 Spiral flying track
根据隐身飞机的飞行航迹与飞行速度设置,飞机沿此侧站盘旋航迹飞行一周需要396 s。
1.1.2二维姿态角解算
飞机在飞行过程中相对于雷达的实时姿态角可由雷达与机体坐标系的转换关系和飞机的实时位置解算出来。雷达坐标系与机体坐标系的对应关系如图3所示。
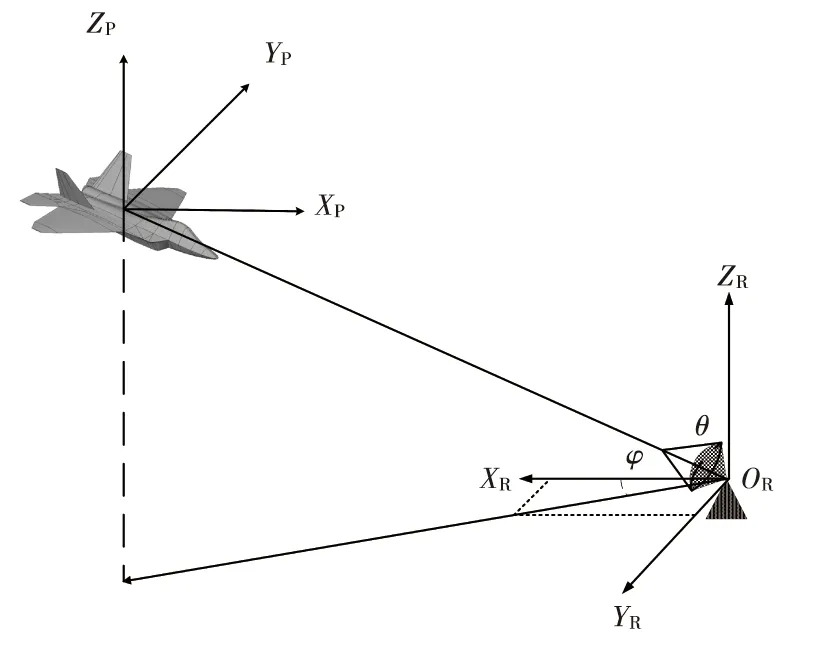
图3 坐标系转换示意图Fig.3 Diagram of coordinate system conversion
雷达坐标系与机体坐标系的转换关系[3-4]为:
(1)
式(1)中,坐标(x(t),y(t),z(t))表示雷达坐标系中任意一点的位置;(xP(t),yP(t),zP(t))是点(x(t),y(t),z(t))相应在机体坐标系中的坐标位置;(xR(t),yR(t),zR(t))是飞机所处位置在雷达坐标系中的坐标位置;T是雷达坐标系到目标坐标系的坐标系转换矩阵,具体如式(2)所示。

(2)
将雷达坐标原点(0,0,0)代入式(1),则时变的视线姿态角可以表示为:
(3)
1.2 隐身飞机自卫式干扰效能
雷达的探测距离与探测概率是衡量雷达工作性能的重要评价指标,因此隐身飞机的自卫式干扰的干扰效能可以通过雷达受到干扰后的探测距离与发现概率变化来衡量。
1.2.1雷达探测距离
1)无干扰状态的雷达探测距离
在保持雷达的虚警概率恒定且设定好检测门限后,无干扰状态下时变的雷达探测距离为:
(4)
式(4)中,RT-max(t)为雷达实时最大探测距离;Pt为雷达发射机的峰值功率;Gr=Gt为收发一体天线的主瓣增益;σt为t时刻突防隐身飞机的RCS值;λ为雷达工作波长;k为波尔兹曼常数;T0为内部噪声温度;Bn为接收机带宽;Fn是接收机的噪声系数;Ls是雷达各部分损耗引入的损失系数;(S/N)min是雷达检测信号所需的最小可检测信噪比。
2)自卫干扰状态的雷达探测距离
雷达在自卫式干扰下的探测距离为:
(5)

1.2.2雷达检测概率
1)信噪比-信干比
对式(4)进行推导变换,可得到飞机飞行过程中雷达接收机内的时变信噪比:
(6)
式(6)中,Rt为隐身飞机与雷达的实时距离。
同理,对式(5)进行变换,可得到飞机飞行过程中释放自卫式干扰情况下的接收机内时变信干比:
(7)
当干扰信号与回波信号一起进入到雷达接收机的时候,无用信号成为了干扰信号与接收机内的噪声信号的混合信号,这时的信噪比与信干比就叠加成了信干噪比,文献[2,7]给出了干扰条件下雷达系统中信号与干扰和噪声之和的比值:
(8)
2)雷达检测概率
雷达的检测概率Pd是在有用信号和无用噪声干扰信号混合背景下的信号包络r(t)超过门限电压VT的概率。接收信号是信号和噪声的叠加,因为噪声的幅度服从Rice分布,所以接收的叠加信号也服从Rice分布。根据Rice分布的概率密度函数[13],检测概率可以表示为:
(9)


(10)
式(10)中,Q称为Marcum Q函数[14],是一种积分运算。
当雷达受到干扰时,进入雷达接收机内的信干噪比代替雷达的信噪比成为影响检测概率的因素,因此自卫干扰下的雷达检测概率为:
(11)
式(11)中,SJNR为干扰下进入雷达接收机内的信干噪比。
2 隐身飞机自适应功率自卫式干扰模型
在实际作战中为防止被无源雷达所截获,隐身飞机在利用自身搭载的干扰设备对雷达释放自卫式干扰时一般不会进行长时间的大功率输出,而是控制干扰功率大小,间断地释放,使自身不仅在机身的散射上实现隐身,而且在射频输出上也实现尽可能的隐身。
2.1 隐身飞机自适应干扰功率释放模型
在突防过程中隐身飞机虽然会注意控制干扰功率的释放,但是干扰释放的目的是有用的雷达回波信号能够被无用的干扰信号遮盖住,只有这样的干扰释放才是有意义的。因此,为同时满足压制目标回波与控制功率的要求,在控制功率输出时多以干扰信号刚好能压制住雷达回波为原则进行释放。
由文献[12]可知,飞机在释放压制性干扰的时候,要想使干扰有效必须使干信比满足:
(12)
式(12)中,G′r为雷达接收干扰信号处的增益,Rt为雷达与飞机的距离。
因为自卫式干扰下的干扰设备与目标飞机处于空间中同一位置,所以自卫式干扰下干扰有效的条件可简化为:
(13)
由式(13)可知,在自卫式干扰下,只要能够确定地面雷达发射的探测信号功率和天线增益并且估计出飞机自身相对于雷达的RCS以及飞机相对于雷达的距离,隐身飞机就能够控制干扰信号到达雷达接收机的信干比,使回波信号与干扰信号的功率比值刚好大于雷达的压制系数,保证干扰有效。
当干信比能够得到控制时,对式(13)进行变换可得:
(14)
通过式(14)可知,当能够保证进入雷达接收机内的干信比恒定且能够估计出相关参数信息的时候隐身飞机就可以实现自适应地控制干扰功率。但是对于空中的隐身飞机来说,在突防的过程中要想实时确定飞机与地面的雷达距离十分困难,所以不能利用此方法实现对干扰功率的直接控制。
虽然飞机无法在飞行的过程中直接确定飞机与雷达之间的距离,但是飞机可以测量出接收机接收雷达探测信号的功率,具体功率大小如式(15)所示:
(15)
式(15)中,Pi(t)为接收机接收的即时雷达信号功率。
从式(15)中可以看出飞机接收的雷达探测信号功率涵盖了飞机与雷达之间的距离和雷达设备的相关参数信息。因此飞机可以利用接收机接收到的雷达探测信号功率做为飞机自适应控制干扰信号功率的先验信息,通过式(15)的计算方式完成干扰有效下的干扰功率的自适应控制。
对式(13)进行变换,在t时刻飞机若想有效干扰雷达,则干扰设备释放的干扰功率应满足:
(16)
式(16)中,Pj(t)为隐身飞机实时的干扰信号功率。
将式(15)代入到式(16)中可得:
(17)
由式(17)可知,只要飞机能够测量出实时进入接收机内的雷达辐射功率,并结合自身的RCS,飞机就可以保证干扰功率的自适应释放,实现自适应功率的自卫式干扰,达到有效干扰雷达和射频输出隐身的目的。
2.2 功率释放评估模型
因为隐身飞机辐射功率的大小将直接影响飞机被无源雷达所侦察截获的距离,所以衡量自适应干扰功率释放对飞机自身的影响可以通过飞机释放的固定功率与自适应干扰功率下的被截获距离来量化分析。
自适应功率与固定功率下的截获距离变化可用截获距离变化因子来表示,如式(18)所示:
(18)
式(18)中,Rcj为自适应功率状态飞机被截获距离,Rj为固定干扰功率状态飞机被截获距离。
当只考虑干扰功率因素的时候,截获距离变化因子可推导变换为式(19):
(19)
式(19)中,Pcj为自适应干扰功率,Pj为固定干扰功率。
通过对截获距离变化因子ρ的定义及推导变换可以看出该因子能够对自适应干扰功率的释放对飞机自身的影响量化衡量。
3 仿真分析
根据隐身飞机自卫式干扰模型与自适应功率自卫式干扰模型,结合隐身飞机RCS获取方式以及实际中相关设备参数对侧站盘旋航迹下隐身飞机自适应功率自卫式干扰对雷达及飞机自身的影响进行仿真分析。
在对隐身飞机自适应功率自卫式干扰效能进行仿真分析时,为更加突出隐身飞机自适应功率自卫干扰的优势,本文将隐身飞机与三代机突防中的自适应功率控制结果进行对比,仿真分析中非隐身飞机雷达散射截面积参数设为12 dBsm。
雷达与干扰设备的参数设置如表2所示。
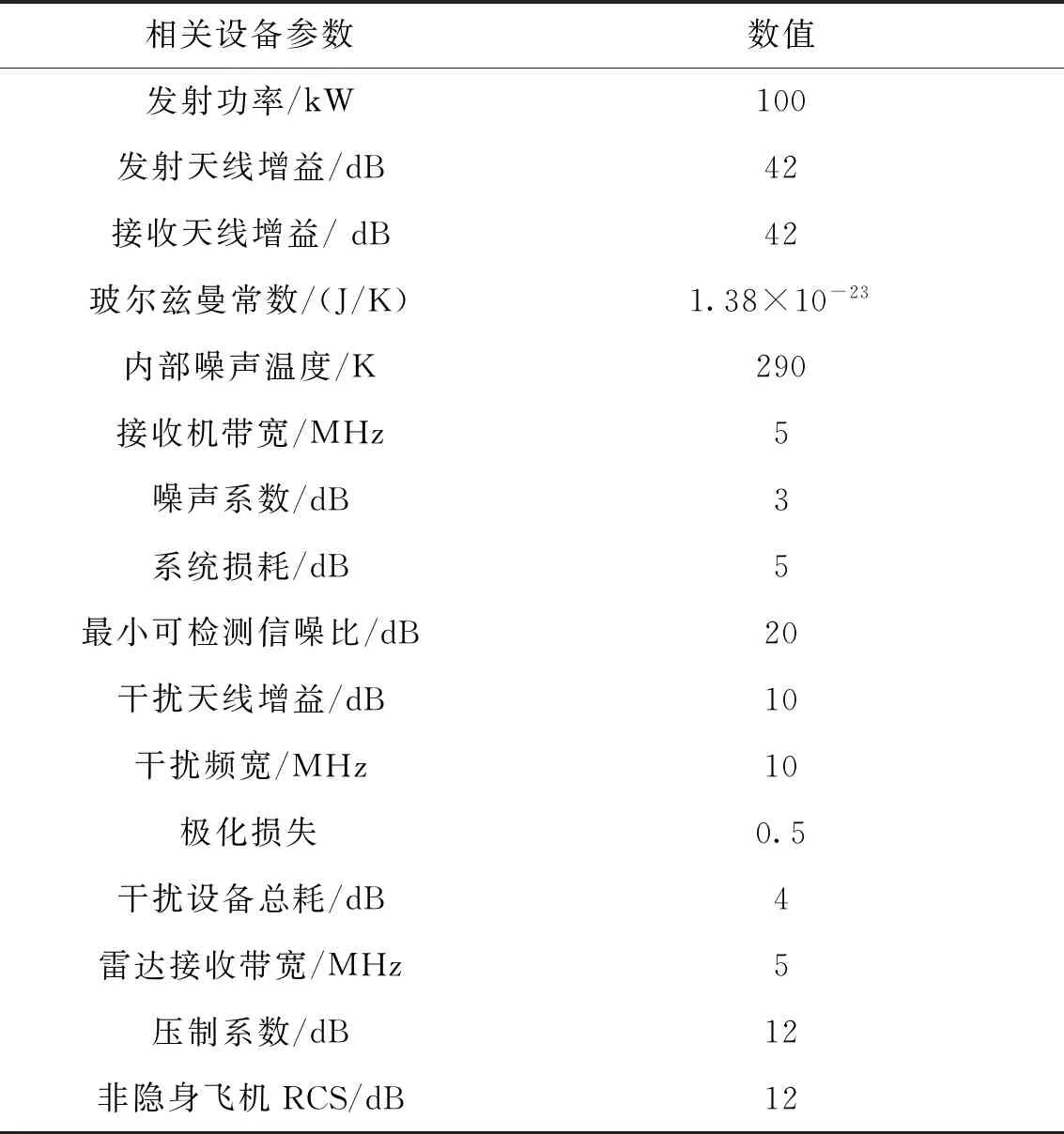
表2 相关设备参数设置Tab.2 Related equipment parameter settings
3.1 隐身飞机RCS
根据设定好的飞行航迹、雷达坐标系与机体坐标系,解算出飞机在侧站盘旋飞行0~396 s内的即时方位角与俯仰角,根据角度信息从隐身飞机全空域的静态RCS数据库中提取出相对应的实时变化的RCS数据。
图4给出了飞机侧站盘旋一周,即0~396 s内动态RCS的仿真结果。
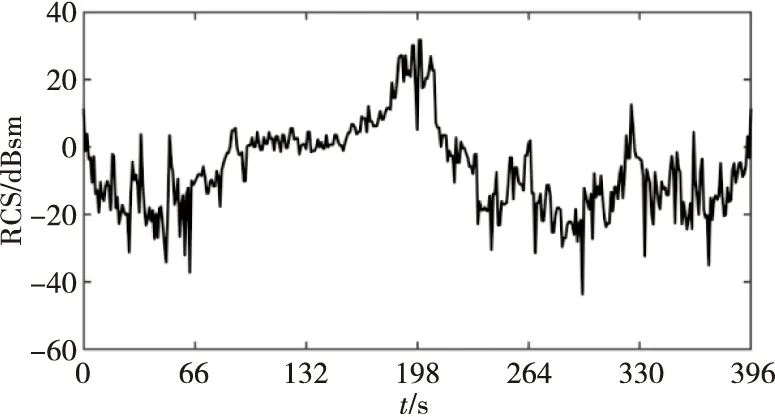
图4 隐身飞机动态RCS序列Fig.4 Dynamic RCS series of stealth aircraft
从图4中可以看出,隐身飞机在空中盘旋飞行过程中的动态RCS序列在-43~31 dB中起伏变化,在盘旋飞行的0~396 s内,动态RCS的随机性较强,不遵循特定的统计分布规律,且相邻时间的RCS幅度起伏较大,说明隐身飞机在飞行过程中细小的飞行姿态改变就能使得飞机的隐身性能发生较大的强弱变化。
3.2 自适应干扰功率
飞机通过估计自身相对于雷达的RCS和雷达信号到飞机处的功率,再根据式(17)就可以确定隐身飞机在0~396 s飞行过程中自适应释放的功率。隐身飞机与非隐身飞机在0~396 s盘旋飞行过程中自适应功率释放情况如图5所示。
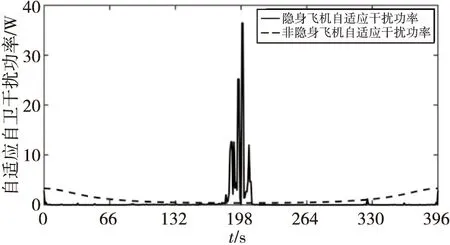
图5 自适应自卫干扰功率Fig.5 Adaptive jamming power
分析图5可以看出,隐身飞机在0~396 s内经过自适应功率管理后释放的干扰功率最大为36.5 W左右,最小达到了微瓦量级,大部分时间所需要的干扰功率处于几百毫瓦到几毫瓦之间,整个突防过程中累计共需要干扰功率247.5 W;非隐身飞机经自适应功率管理后释放的干扰功率最大为4.16 W,最小为0.5 W,整个突防过程中累计共需要干扰功率452.6 W。
从图5可以看出,对于自适应控制功率释放,非隐身飞机在整个突防过程中的干扰功率在大部分时间内均高于隐身飞机干扰功率,突防过程中累计消耗功率要大于隐身飞机的消耗功率,表明隐身特性有助于干扰功率资源的节约。
3.3 雷达探测性能
3.3.1雷达探测距离
根据表2设置的相关参数和自适应功率释放的输出结果,利用飞机无干扰和自卫干扰状态的雷达探测距离公式(4)和式(5)以及0~396 s内时变的RCS序列,解算出雷达在两种状态下的探测距离,并将其与飞机的实际距离进行对比,具体情况如图6所示。
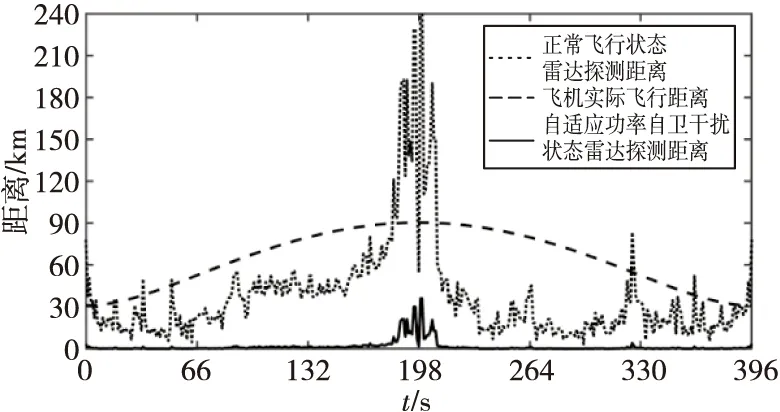
图6 雷达探测距离与飞机飞行距离Fig.6 Radar detection distance and aircraft flight distance
从图6中可以看出,隐身飞机在盘旋飞行过程中的实际距离在30~90 km范围内变化,而飞机正常飞行状态的雷达探测距离在3~251 km之间,并且可以看出,在盘旋飞行的过程中,虽然隐身飞机具有良好的隐身性能,但是雷达在某几段时间内还是可以探测到空中正常飞行状态的隐身飞机,对飞机造成了一定的威胁,所以在这种情况下隐身飞机必须通过释放干扰来保护自身安全。当隐身飞机对雷达释放自适应功率输出的自卫干扰时,雷达的探测距离在0~396 s均在36 km以内,并且每一时刻的雷达探测距离都低于飞机的实际飞行距离和正常飞行状态的雷达探测距离,表明隐身飞机释放的自适应功率自卫式干扰可以成功缩减雷达的探测距离,雷达此时将不能有效探测到目标,隐身飞机实现了对自身的保护。
3.3.2信噪比与信干噪比
根据式(6)—(8)的计算方式,在飞机盘旋飞行的过程中,正常飞行状态进入雷达接收机内的信噪比与自适应功率自卫式干扰状态进入接收机内部的信干噪比都是与时间有关的时变量,仿真计算出的时变信噪比与信干噪比如图7所示。

图7 时变的信噪比与信干噪比Fig.7 SNR and SJNR
图7表明:飞机在盘旋飞行的过程中,雷达在飞机正常飞行状态的信噪比在-37~37 dB范围内;在自适应功率自卫式干扰状态的信干噪比在-37~-10 dB范围,大部分时间保持在-12 dB左右,这说明自适应功率释放在控制功率的同时保证了自卫式干扰的有效性。
3.3.3雷达检测概率
设定好检测门限(Pfa=10-6),根据式(10)和式(11)的计算方式,利用求解出来的飞机正常飞行状态的信噪比与自适应功率自卫式干扰状态的信干噪比,仿真计算出雷达在0~396 s内的检测概率,两种状态下的雷达检测概率分别如图8(a)、(b)所示。
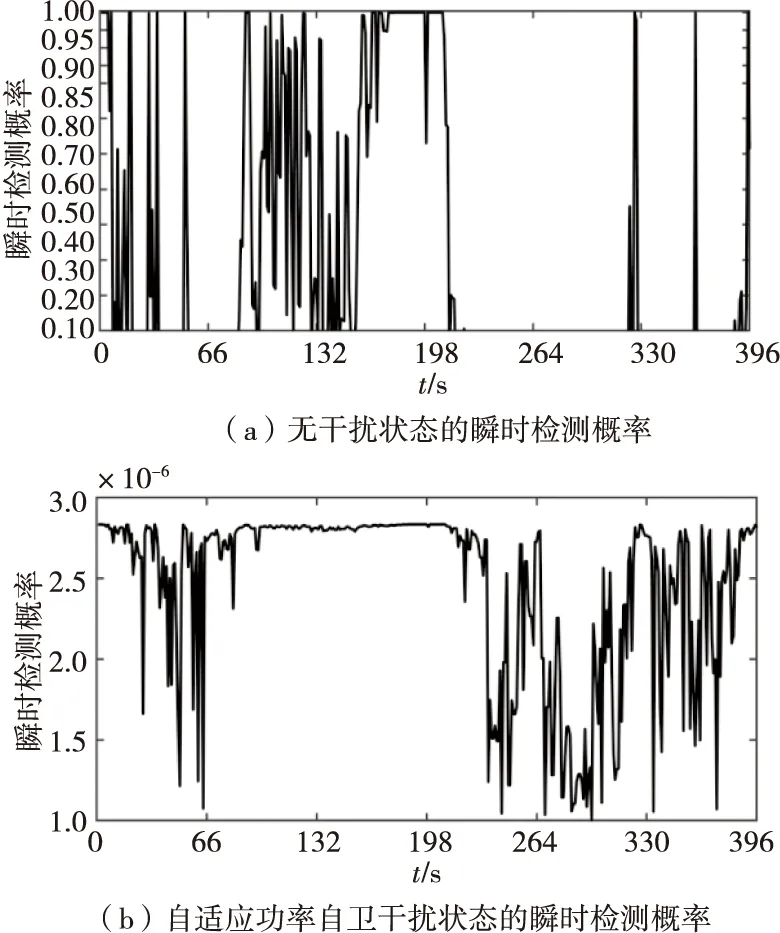
图8 雷达检测概率Fig.8 Radar detection probability
比较图8(a)、(b)可知:在隐身飞机正常飞行状态下,雷达在大部分时间内发现飞机的概率较大,并且随着雷达探测波束照射的时间增多,雷达的扫描次数也会增多,累积检测概率也将会增加,因此能够对飞机产生较大的威胁;在自适应功率自卫式干扰状态下,雷达受到干扰影响之后的检测概率急剧下降,0~396 s内的检测概率均在10-6数量级,可以认为雷达对空中释放干扰的隐身飞机的检测概率几乎为0,不能对隐身飞机构成威胁,飞机盘旋飞行的安全性得到了保障。
3.4 功率释放评估
由自适应干扰功率输出的结论可知,飞机在自适应功率自卫式干扰状态输出的最大干扰功率为36.5 W,也就是说隐身飞机在盘旋飞行的过程中要想形成有效干扰至少要在某一时刻的干扰功率为36.5 W,因此当隐身飞机以固定的干扰功率进行自卫式干扰的时候,干扰功率至少为36.5 W。所以本文取飞机固定36.5 W干扰功率与自适应干扰功率下的飞机被截获距离进行比较,利用截获距离变化因子评价自适应释放干扰功率对于飞机自身隐蔽距离的影响。
根据式(19)的计算方式,两种干扰功率释放方式下的0~396 s内的截获距离变化因子情况如图9所示。
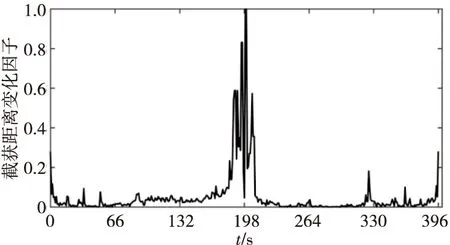
图9 截获距离变化因子Fig.9 Intercept distance variation factor
分析图9可知:在隐身飞机盘旋飞行0~396 s内截获距离变化因子始终未超过1,且仅在某一时刻等于1,大部分时间内变化因子小于0.2,平均截获距离变化因子为0.051 1,表明自适应干扰功率的释放方式明显缩短了隐身飞机被无源雷达侦察发现的距离,提升了自身的隐蔽距离,保证了自身的安全性。
4 结论
本文提出了隐身飞机自适应功率自卫式干扰模型,模拟了对应的干扰场景,将隐身飞机与非隐身飞机的自适应干扰功率控制结果进行对比,分析了隐身飞机有无自适应功率自卫式干扰对雷达探测性能的影响以及固定干扰功率和自适应干扰功率释放对自身隐蔽距离的影响。仿真结果表明:隐身飞机释放的自适应功率自卫式干扰能够降低雷达的探测性能,增加隐身飞机自身的隐蔽距离,而且在提升了自身突防生存能力的同时节约了更多的干扰功率资源,为实际中的隐身电子战飞机的作战运用提供了参考,具有一定的实际应用价值。
猜你喜欢
现代雷达(2023年11期)2024-01-05 15:01:52
电气技术(2021年3期)2021-03-26 02:46:08
通信电源技术(2020年22期)2020-03-27 06:48:02
国防科技大学学报(2020年1期)2020-02-07 12:58:40
成都信息工程大学学报(2018年5期)2018-12-06 09:23:52
测控技术(2018年3期)2018-11-25 09:45:52
舰船电子工程(2018年1期)2018-02-07 05:45:15
北京航空航天大学学报(2017年12期)2017-04-23 08:31:51
通信学报(2016年8期)2016-11-24 07:29:11
工业设计(2016年6期)2016-04-17 06:42:54
