低慢小目标的雷达信号处理算法探究
2021-07-17 11:53陶亮
科教导刊·电子版 2021年15期
陶 亮
(中国电子科技集团第十四研究所 江苏·南京 210000)
低慢小目标,指的是低空慢速的小目标,由于我国刚开放低空领域不久,对于这类目标的防控,还处于起步研究阶段,是公认的世界性难题。正是因为低慢小目标的侦测难、管控难、处置难的特点,其对城市及要地的安全隐患不容小觑,面对日趋严峻的无人机威胁,为进一步促进军民融合市场的发展,我国政府愈加支持反无人机技术以及相关武器装备的开发。以下是雷达对低慢小目标进行侦测时,存在的主要问题:一是低慢小目标的飞行高度地,容易受到车辆、行人等回波信号的干扰,难以分辨;二是低慢小目标飞行速度较慢,但其多普勒频率和固定、慢速杂波的频率重叠交错,导致低慢小目标的频率与杂波很难区分出来;三是低慢小目标的RCS反射面积较小,回波比较弱,低信杂比导致小目标比较容易淹没在各种杂波之中,很难检测出来。
1 低慢小目标雷达信号处理算法的研究基础
雷达探测低慢小目标之时,由于杂波背景比较强,以往雷达信号处理的杂波抑制方法以及检测方法很难将目标信息提取出来。因而,对低慢小目标的雷达信号处理研究,集中在寻求更为有效的信号处理办法上,加强对低慢小目标的防护与监管。从早期模拟电路发展至今,现如今的数字技术为雷达信号处理提供了更为有利的技术支持,为更为复杂的雷达信号处理算法提供了施展平台,问题在于如何运用现如今的数字技术,针对低慢小目标的特点模块化、规范化地建设与完善雷达信号处理系统,以实时检测、分析、操控为目标,注重挖掘雷达信号处理的潜力。
低慢小目标的雷达侦测过程中,信号处理的价值在于获取更为精准、有效的信息,对目标进行检测时则是要想方设法地消除杂波的影响,一般的MTI和MTD滤波器对杂波的抑制效果并不明显。因为低慢小目标的速度较低,极易受到杂波或干扰的影响,滤波器的设计是雷达信号处理的前提。不同于一般的侦测目标,基于低慢小目标速度低、易受干扰的特点,使用MTD滤波器以及FIR滤波器时,通常会进行加窗处理,以改善旁瓣电平,净这样容易消除不同滤波器中目标之间得相互影响。灵活地应对各种杂波速度分布,并在零频附近形成凹口。例如,加窗的FIR滤波器可以改善中心频率较高的滤波器副瓣,而常规的FIR滤波器则会由于零频处的凹口宽同杂波信号的谱宽度相互匹配造成滤波器主瓣产生畸变。这种畸变问题会影响低慢小目标信号的提取、处理,需要设计出更为灵活、精准的滤波器,现如今比较受欢迎的是一种变凹口宽度的FIR滤波器设计方法,以调整滤波器获得最优凹口宽度的方式,有效地抑制杂波并减少雷达信号损失。常规的FIR滤波器和变凹口的FIR滤波器,在一定程度上可以满足低慢小目标雷达侦测以及信号获取的要求。因此,低慢小目标的雷达信号处理算法,建立在常规的FIR滤波器和变凹口的FIR滤波器之上,选用常规的FIR滤波器配合MTD滤波器进行雷达信号处理,对低慢小目标检测与雷达信号处理算法展开研究。
2 低慢小目标雷达信号处理流程及关键算法
2.1 低慢小目标雷达信号的处理流程
低慢小目标的雷达信号处理流程,是从雷达对接收的回波信号的和差处理入手,通过信号通道获取信号、方位差信号和俯仰差信,然后经过脉冲压缩以及杂波抑制MTD/FIR滤波,逐步获取低慢小目标的方位角、俯仰角以及距离等数据及相关误差。其中,和信号用于判断低慢小目标的距离以及速度,用于进行距离和速度的动目标检测;方位差信号则是通过比幅测角算法来获取低慢小目标的方位角误差;俯仰差信号则是用于计算低慢小目标的俯仰角误差。而低慢小目标的雷达信号处理,最终会以点迹信息的形式流入雷达数据处理模块,并在此模块完成点迹建航、目标参数估计以及滤波跟踪、预测等工作。
2.2 低慢小目雷达信号处理的关键算法
低慢小目标的雷达信号处理算法,由脉冲压缩、点迹凝聚、杂波抑制、恒虚警检测、单脉冲测角组成,这五个算法组成了低慢小目标雷达信号处理的基本框架。因为,脉冲压缩、点迹凝聚这两个算法的流程相对固定,所以杂波抑制、恒虚警检测、单脉冲测角这三个算法才是雷达信号处理的关键算法,其变化空间更多,以下是对这三个算法的具体介绍:
(1)杂波抑制。此种算法,主要是根据杂波与低慢小目标的多普勒频率的差异,通过同时加大目标回波的积累时间,来加强对低慢小目标的雷达侦测能力,对多个回波脉冲进行长时间相积累后获取更高的新杂比。由于低慢小目标的雷达侦测存在一些问题,仅仅依靠MTD很难分辨出低速目标以及地杂波功率较强、周围的数目、草地摇摆等会影响杂波谱宽度,常规的MTD算法很难起效,所以在处理流程上先进行脉冲压缩再进行杂波抑制,以杂波对消的方式在MTD之前先初步一致杂波后,再运用MTD+FIR形成级联滤波器,从而降低副瓣提高信杂比。并且,适当地增加了目标回波的积累时间,通过较长的驻留时间以尽可能地提高多普勒分辨率,有效地在频域中将低慢小目标与杂波区分开,按照低慢小目标的多普勒分辨率与1 m/s~60 m/s速度范围,设定最大通道与最小零通道参数,以排除其他高速目标的干扰以及丢弃范围外的通道,降低处理的计算量。以下是MTD多普勒滤波器组:
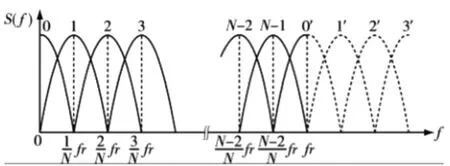
图1:MTD多普勒滤波器组
(2)恒虚警检测。这是一种雷达目标自动检测技术,通过将变化的低慢小目标雷达侦测背景噪声环境,进行恒虚警处理后使得其保持在恒定转台,从而避免由于虚警率过高造成性能过载。目前,恒虚警检测器种类繁多,差别主要是体现在算法对杂波均值的估算法上。根据低慢小目标存在的特点,其雷达信号处理,先是在单元平均恒虚警处理中选用了距离维和多普勒维的二维CFA R处理,再通过杂波先验信息与历史信息,通过多次扫描周期回波数据在距离、方位上估计得到的统计表,在固定长度的活动窗口上实时更新数据获得动态杂波图后,分析杂波特性,并基于杂波与目标特征的差异,展开自适应目标平均恒虚警检测。由于动态杂波图实时更新的数据计算量庞大,为迅速、有效地进行杂波分析,对原有单元平均恒虚警算法做的相应的改进:先用信号平均功率作为门限,再启动滑窗过滤一遍以降低计算量,待杂波图变化趋于稳定然后降低更新频率,选用变遗忘因子来更新杂波图中的数据,以下是具体的更新公式:

(3)单脉冲测角。这是一种利用一个单独脉冲产生的四个波束测量目标角度位置的算法。这种算法主要是根据天线馈电的特点,工程上更为倾向和差法测角,其主要原理如下图:
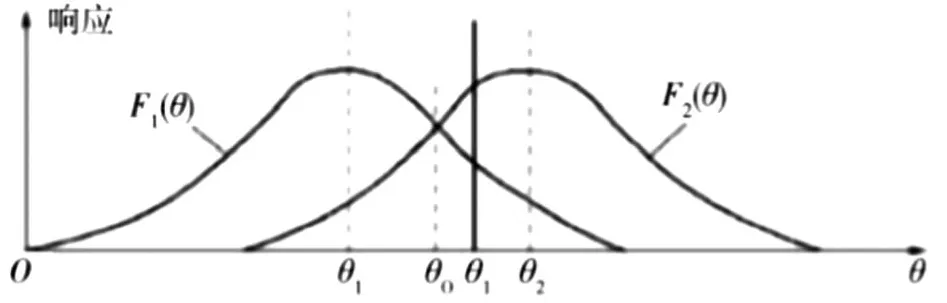
图2:和差法测角原理
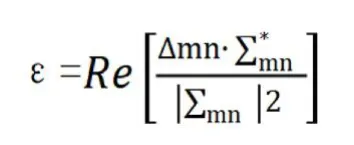
目标误差角 计算公式如下:
2.3 算法验证及今后研究方向
算法验证以无人机作为目标,通过雷达侦测采集了原始回波数据,将数据以I/Q信号形式输入到雷达信号处理模块之中,仿真验证雷达信号处理算法是否有效。根据仿真结果,复杂环境的杂波与噪声干扰下,低慢小目标的雷达信号处理算法正确、有效,契合低慢小目标信号检测、测距、测速等功能需求。今后对于低慢小目标雷达信号处理算法的研究,集中在信号处理与数据处理对接上,以期通过雷达侦测获取更多实测数据,进行反复测试积累更多的工程经验数据,从而针对不同场景调整算法参数,优化雷达信号处理算法流程以改善信号处理效果。此外,由于低慢小目标的机动范围较大且速度变化快,具有悬停、垂直升降等独特运动特征,对于低慢小目标的雷达信号处理,可通过信号处理的检测前跟踪方法(TBD)围绕目标的稳定检测跟踪,进行深入探究。
3 结语
由于低空小目标存在着犯罪成本低、监管难等问题,无人机等典型低慢小目标对城市与要地的安全威胁越来越大,国家政策在开发低空领域的同时,也在加强对反无人机技术与相关产品的开发。探究低慢小目标的雷达信号处理算法,在于解决低慢小目标雷达信号探测与处理存在的难题,文章基于其回波较弱、易受杂波干扰的特点,寻求能在复杂背景条件下检测出低慢小目标的信号处理算法,并进行验证,发现基于杂波抑制、自适应恒虚警检测(CFA R)和单脉冲测角算法对加载雷达实测的回波数据进行处理,能检测出低慢小目标,并实现强杂波抑制。
猜你喜欢
兵工学报(2022年11期)2022-12-01
科学与信息化(2021年30期)2021-12-24
喜剧世界(2017年5期)2017-12-06
科学与财富(2017年24期)2017-09-06
设备管理与维修(2017年1期)2017-04-11
喜剧世界(2016年17期)2016-11-26
喜剧世界(2016年3期)2016-11-26
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23
现代防御技术(2014年6期)2014-02-28