
磁悬浮飞轮中位移检测信号工频干扰分析及消除研究∗
2021-07-16 14:05:02张霁阳
电子器件 2021年3期
刘 鸣,王 攀,毕 伟,江 玮,张霁阳
(1.国网湖北综合能源服务有限公司,湖北 武汉 430070;2.武汉理工大学机电工程学院,湖北 武汉 430070)
磁悬浮飞轮电池作为一种高能量密度储能设备,常用于微电网系统电能存储与微电网调峰调频。而微电网中往往存在诸多干扰,如天电干扰、电磁波干扰、工频干扰、气象干扰、耦合感应、尖峰噪声等。这些使得传感器、监控装置等信息技术设备的工作环境日益恶劣。其中工频干扰是最为常见的一类干扰,微电网中间歇地通断会造成浪涌、工频信号等干扰,影响磁悬浮飞轮系统中电涡流位移传感器的位移检测精度,从而影响飞轮运行时的稳定性,所以消除采集信号中的工频干扰对提升微电网在用户侧的稳定性和安全性具有重大意义。
目前,工频干扰的消除办法大体上可以分为软、硬件2 种[1]。硬件方面采用如陷波电路、耦合电路等;软件方面采用如滤波算法、平滑处理等。任洪林等[2]针对电网频率波动的实际情况,基于双T 型阻容有源陷波电路,设计了可以滤除频带在49.5 Hz~50.5 Hz 之间工频干扰的陷波电路,但是仅靠硬件虽可去除一部分工频干扰但不能完全消除,而且可能会同时消除一部分有用信号,信噪比一般不能得到较大的提高。张晓涛等[3]采用电涡流位移传感器测量可倾滑动轴承转子轴颈处的振动位移时发现时域波形和轴心轨迹中存在工频干扰,影响信号分析和判断,因此提出了一种基于谐波小波和奇异值分解的工频干扰抑制算法,但其需要人为地对工频及其倍频的子带宽度进行设置。李伟光等[4]在采集旋转机械振动信号时发现给电涡流传感器供电的直流稳压电源仍含有工频干扰,导致电涡流传感器直流输出信号中混有电源工频成分,提出了一种基于奇异向量频谱的消除方法,其算法较为复杂,无法满足具有较高实时性要求的飞轮电池控制系统。
基于梯度下降法发展起来的最小均方(Least Mean Square,LMS)算法,因其结构设计简单、稳定性能良好且工程易于实现等优点,被广泛应用于信号滤波领域。陈琪等[5]提出了一种基于LMS 的切换步长因子符号的控制策略,只需要调节一个参数,但收敛时间仍比较长,1.5 s 时相比振幅最大值还有0.4。夏晓等[6]分别对LMS 算法其中的两个方向进行了研究改进,但其收敛慢,精度和噪声处理方面处理效果不佳,状态不稳定。
综上所述,目前LMS 算法的收敛速度以及算法精度还有待提高,且在工频干扰去除领域的应用研究较少,本文在现有研究基础上,提出了一种适用于消除工频干扰、收敛速度更快的LMS 算法,仿真分析验证了本文算法的可行性,实验验证了算法的优越性。
1 工频干扰消除原理
1.1 磁悬浮飞轮储能微电网调峰
微电网是由分布式电源、储能装置、能量转换装置、负荷、监控和保护装置等组成的小型发配电系统。如图1 所示,飞轮储能电池常常被用作分布式电源,其他常被用作分布式电源的还包括风力发电机、光伏电池、内燃发电机、化学燃料电池等。在微电网中,特别是微网单独运行时,飞轮电池能够很好地抑制分布式能源的波动,可以电网调频抵抗冲击负荷,从而提高电网品质,飞轮电池本身还有储能比大、无污染无噪音、使用寿命长等优点。

图1 微电网组成结构图
飞轮中的磁悬浮轴承一般采用混合磁轴承,控制电流对飞轮转子进行调节防止其在受到干扰时与定子碰撞而失稳,真空容器是为了减少转子高速旋转时与空气摩擦,储能时采用电机加速转子,把电能转化为机械能储存在飞轮中,放电时电机作为发电机,将飞轮转子动能转化为电能供外部设备使用。其中一个磁悬浮轴承往往与几个位移传感器一起配合运作。
1.2 位移检测信号的工频干扰
飞轮系统的用电频率一般在50 Hz 附近波动,由于传感器一般采用弱电,很容易捡拾工频电磁波中的电场干扰[7],从而影响电涡流传感器的信号采集和传输。
电涡流传感器采集到的信号可以通过式(1)来简单表示:

式中:D(n)表示初始采集到的信号,S(n)表示环境噪声,X(n)是采集到的总信号,n表示采样次序。实际环境中,S(n)通常混杂了50 Hz 的干扰信号[8],给滤波带来了困难。
在对飞轮系统实际实验操作时发现,仅在悬停时位移传感器就会受到严重的工频干扰,旋转控制时这种现象愈发严重,这种干扰会降低控制系统的稳定性。因此,有必要消除飞轮系统中电涡流传感器受到的工频干扰。
1.3 传统LMS 算法
采用LMS 算法来提高滤波效果,其基本信号关系如图2 所示[9]。
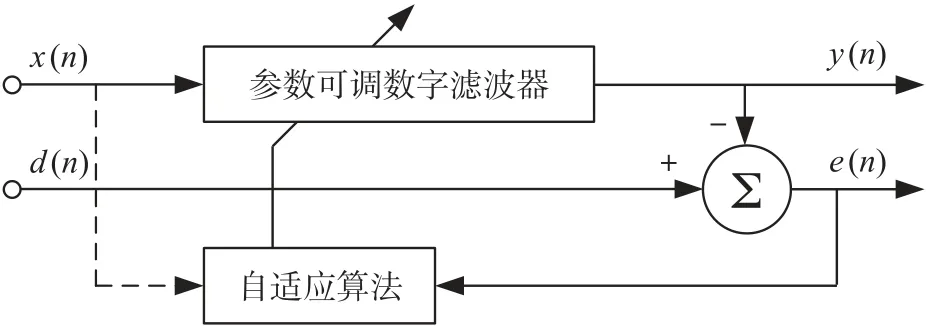
图2 自适应算法滤波
由此,输入信号x(n)通常为位移传感器采集到的位移信号和工频干扰的复合信号,滤波处理后期望得到准确的位移信号y(n),消去工频干扰。其中输出信号y(n)由输入信号x(n)经过如图1 所示滤波器滤波后得到,将其与参考信号d(n)作差值得到误差信号e(n)。自适应算法再根据e(n)对滤波器参数进行反馈调整,期望的结果是得到最小的e(n)均方值。当达到这一要求时,就可以证明信号y(n)是信号d(n)的最佳估计。
传统LMS 自适应滤波算法流程如下[10],其中W表示相应的调权参数矩阵。
陈琪等[5]提出了一种基于传统LMS 的改进方法,其步长因子如式(3),其中f为转子转动频率,α为步长调节参数。

2 一种新的变步长LMS 算法
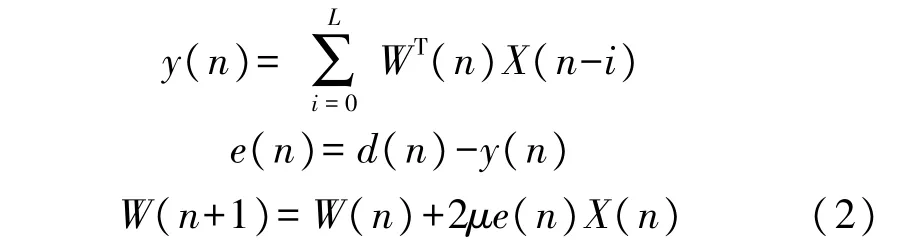
结合陈琪等[5]、杨红等[11]提出的因子选取公式,略去了因子中信号矢量的成分,但同时保留了2个调节参数,使步长在收敛稳态期不会因偶尔较大的误差变化而产生过大的变化,保证算法的适应性和稳定性[12]。此计算公式复杂度低,计算快,得到新步长和误差的非线性关系为

根据式(2)推导出的迭代形式为

式中:参数α限制步长的变化范围,β限制步长的变化率范围。只有当时算法才收敛,其中λmax为算法公式中Hessian 矩阵的最大特征值,所以调节α和β参数时也要满足μ的取值范围[13]。
微电网工频信号干扰与其他干扰的区别在于其干扰具有持续性,偶有突变。当误差较大时,应选择较大的步长,当趋于稳态时,选择较小的步长[14]。先对α、β的取值采用MATLAB 仿真分析,可知当其中一个参数固定时,误差和步长的变化关系。
从图3 中可以看出,只有当β取值较大时,步长变化率才趋于0,此时算法才能防止由于瞬时梯度过大而使步长产生极大变化。但是当误差绝对值小于1 时,β取值较大时,其收敛速度较慢。对于微电网环境来说,一般误差e(n)不大于1,所以在满足收敛条件的前提下,β尽量取较小的值。
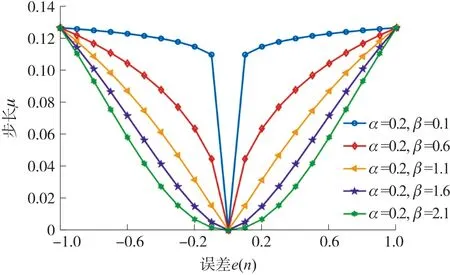
图3 相同α 不同β 时误差和步长的关系图
从图4 中可以看出,当α取值较大时,收敛速度较快,但是在接近稳态时,相较其他取值步长变化率略大,所以在满足收敛条件的前提下,α尽量取大。
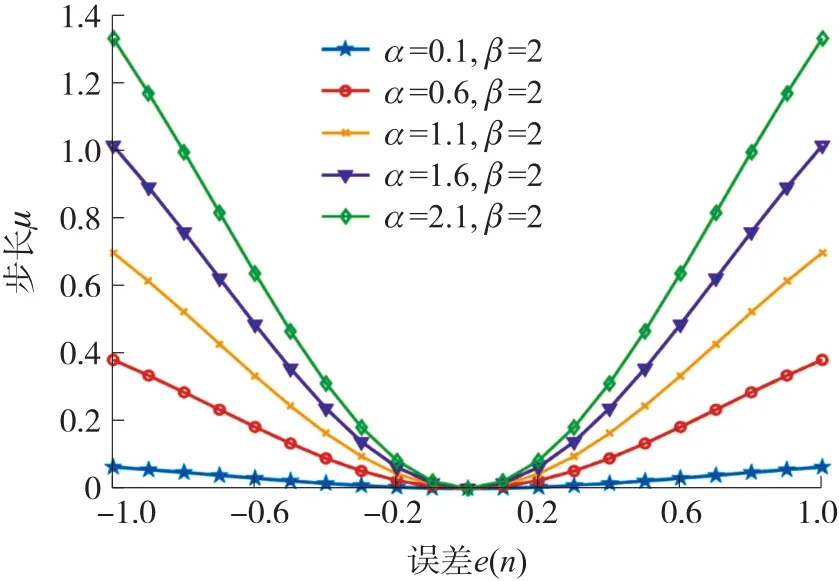
图4 不同α 相同β 时误差和步长的关系图
3 仿真模拟分析
仿真实验采用LABVIEW 2018 软件平台,滤波器阶数为1,长度设置为10 000,取样频率设置为10 kHz,输入信号为50 Hz 的微电网工频信号s(n)=sin(2πfnTs)与标准差为0.05 的高斯加性白噪音的复合信号,其中f为信号频率,Ts为单位信号周期,输出信号期望得到原本的白噪音。
根据传统LMS 算法,步长μ需满足其中λmax为输入信号方差矩阵的最大特征值,根据步长公式可知需满足而β<1 时,会使算法在e(n)→0 时步长变化较大,不满足算法稳定的原则,当β太大时(根据α值,β导致均方差趋于无穷的值有所不同),算法会出现不收敛的情况,分别仿真得到前后5 000 次的均方差和α、β的三维关系图,如图5、图6 所示。
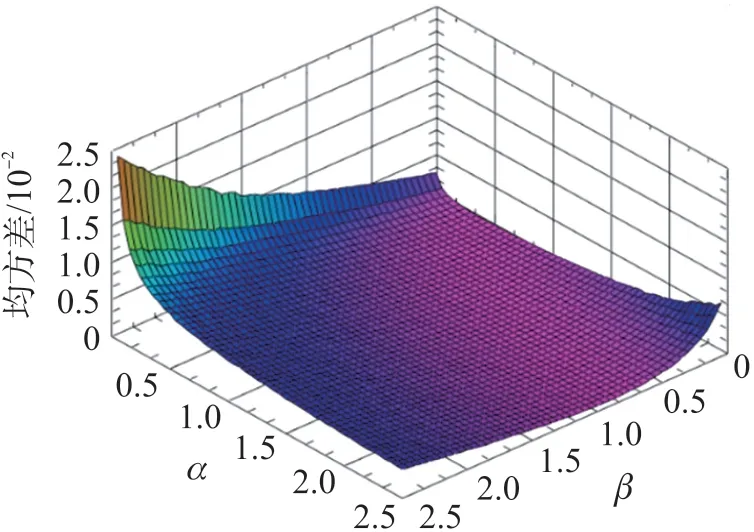
图5 前5 000 次迭代均方差与α、β 取值的关系图

图6 后5 000 次迭代均方差与α、β 取值的关系图
前期迭代得到的均方差越小说明收敛速度越快,后期迭代得到的均方差越小说明稳态误差越小,也就是兼顾算法的收敛速度和稳定性,选择均方差最小的区域,同时满足基本的收敛条件,按照经验原则多次仿真,得到最佳取值α=0.5、β=1.4。
当β=0 时,也就是传统的定步长LMS 算法,选取步长μ=0.6;单一参数算法的因子选取文献[5]中采用的α=0.000 1。将传统LMS 算法以及陈琪等[5]的算法对滤波误差的收敛过程与本算法相对比,将结果呈于图7。

图7 算法收敛过程对比
如图7 所示,传统的LMS 算法虽然能够达到稳定,但其收敛速度较慢,且误差幅值较大。陈琪等[5]中改进的LMS 算法虽然收敛速度较传统而言较好,但由于其参数选择单一,导致步长设置明显过大,算法调节误差较大。而变步长LMS 算法由于对步长进行自适应的调整,使得其误差调节幅值较小的同时获得了更快的收敛速度。根据以上3 种算法的对比,变步长LMS 算法无论是在收敛速度还是误差大小均优于其他几种算法。
4 实验验证
为验证新算法,利用磁悬浮主轴模拟飞轮,对磁悬浮转子平台中的电涡流位移传感器信号进行采集,由于受到平台强电环境干扰,该传感器采集的位移信号中存在50 Hz 工频干扰。如图8 所示为磁悬浮主轴,采集到的位移信号(单路)波形如图9 所示。对其进行频谱分析,得到结果如图10,从图10中可以很清楚地看出转子的转动频率120 Hz 以及工频干扰50 Hz 的频率成分,因此有必要对其进行工频干扰的消除。分别采用传统的LMS 算法以及陈琪等[5]中的改进LMS 算法以及本研究中提出的变步长LMS 算法对图9 所示信号进行工频干扰消除分析,得到其分离出的工频干扰时域信号以及时频分析结果,各结果对比分别如图11~图13 所示。
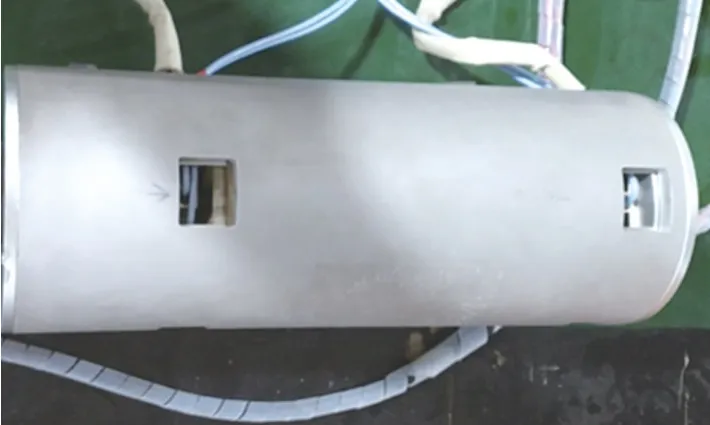
图8 磁悬浮主轴
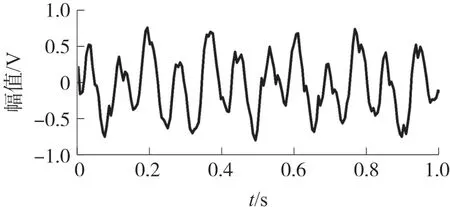
图9 受工频干扰传感器时域信号
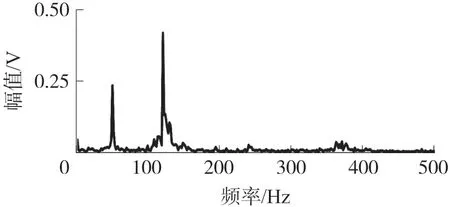
图10 受工频干扰传感器频域信号
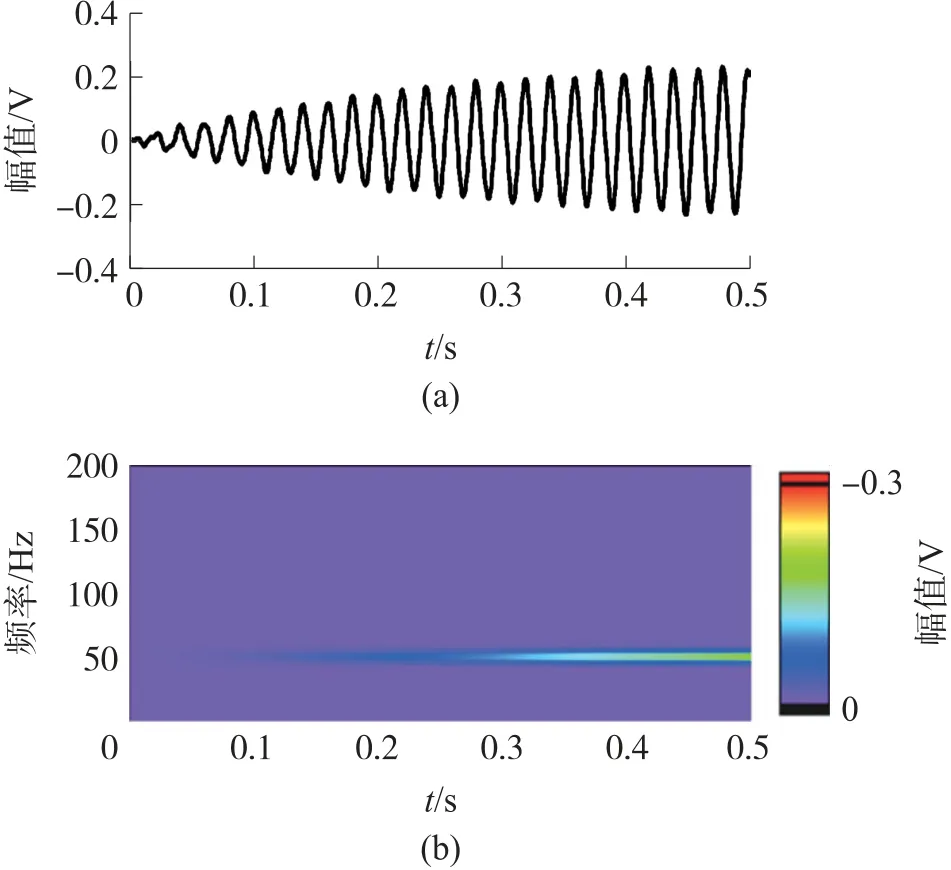
图11 传统LMS 算法分析结果

图12 陈琪等[5]LMS 算法分析结果
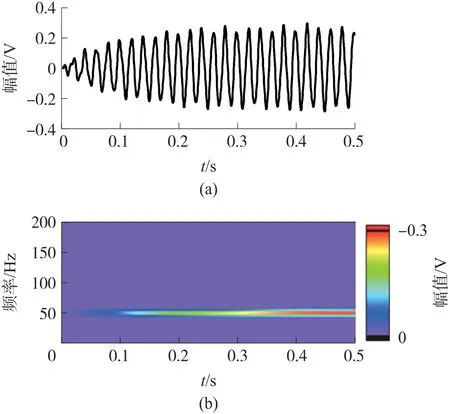
图13 变步长LMS 算法分析结果
从图11 可以看出,传统的LMS 算法虽能消除一部分工频干扰信号,但其收敛较慢。陈琪等[5]改进的LMS 算法由于其步长参数的单一性,虽然算法速度较快,但也导致转子转动频率成分信号的消除,如图12 所示。分步长LMS 算法对50 Hz 的工频干扰消除较好且算法响应较快,对其他频率的信号成分影响较小,是一种更加优越的工频干扰消除算法。
5 结论
(1)提出了一种新的变步长LMS 改进算法,在分析对比了步长所包含的参数对收敛性的影响后,与传统的定步长LMS 算法和一种基于正弦补偿改进的LMS 算法在相同微电网输入信号、多组标准差的噪音环境中对比。仿真结果显示,该算法的收敛速度优于定步长LMS 算法,同时有效保留了有用信号。
(2)通过模拟磁悬浮飞轮装置的实验,验证了本算法仿真的可行性,在相同实验条件下其滤波效果比传统LMS 算法更加稳定,收敛速度比单一参数的算法更快且对其他频率成分的信号影响较小。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23 13:48:30
小学科学(学生版)(2021年4期)2021-07-23 01:24:18
模具制造(2019年7期)2019-09-25 07:30:00
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:31
中学生数理化·七年级数学人教版(2017年6期)2017-11-09 02:46:03
电子制作(2017年8期)2017-06-05 09:36:15
中国自行车(2017年11期)2017-04-04 02:51:30
现代工业经济和信息化(2016年22期)2016-08-23 11:55:40
电测与仪表(2016年16期)2016-04-12 00:25:46
校园英语·中旬(2015年7期)2015-08-10 01:35:27
