
组合式交流接触器全过程智能控制策略
2021-07-15 09:37:26周煜源刘向军
电气开关 2021年1期
周煜源,刘向军
(福州大学电气工程与自动化学院,福建 福州 350108)
1 引言
作为配电系统中大量使用的开关电器,接触器的性能是制约电力系统和其他低压控制系统安全稳定的重要因素[1]。受机械结构的固有缺陷限制,交流接触器动作时间存在很大的分散性[2],吸合过程中触头弹跳剧烈,分断过程中电弧侵蚀严重,都是制约其寿命的重要因素。这些问题单纯依靠改变接触器结构设计已无法解决,伴随着智能控制技术的发展,许多智能控制策略被陆续引入到电磁系统的控制中来,大幅度地提升了交流接触器性能和稳定性。 针对交流接触器吸合过程的控制,主要集中在减少触头弹跳和触头的零电压合闸以减小触头磨损。文献[3-6]提出了基于线圈电流反馈的交流接触器斜率控制器的类PID整定规则、交流接触器自校正控制、批间控制(run-to-run control)等智能控制方法,有效改善了触头弹跳,提高了接触器吸合动作过程的稳定性,有利于触头的定相合闸。随着接触器在电力系统中的大量使用,能耗成了不容忽视问题。相较于吸合时动静触头间的接触电阻能耗和毫秒级起动时间的线圈能耗,线圈的吸持能耗成了最主要的能耗来源。线圈双电源切换供电的控制策略有效地减小了吸持能耗,在起动时线圈采用大电压激磁、保持过程则切换为低压电源供电[7-8],然而当吸持过程中线圈电阻随着温度上升而逐渐变大,接触器工作的可靠性也要大打折扣。而恒电流吸持的控制方式则可以避免这个问题[9-11],但为了维持恒定的电流,线圈励磁回路的开关电子器件需要不停的通断,将带来额外的能耗,并且这两种方式都采用固定的保持电压或电流参考值,导致了其可移植性不强。交流接触器的分断技术则主要是为了快速熄弧,减少电弧对触点的侵蚀。针对电流在过零处电弧容易熄灭的特点引入了零电流分断控制技术,实现了无弧或微电弧分断[12-13]。而三相负载多样性以及不同的负载连接方式下三相电流过零时间各不相同,是零电流分断控制难点,传统结构的交流接触器三相触头几乎同步断开,显然无法实现每一相电流的零电流分断。
鉴于上述问题,本文提出一种异步组合式交流接触器全过程智能控制策略。在吸合过程中采用线圈电流闭环控制方式,有效实现铁心和触头闭合的“软着陆”,使交流接触器动作过程更加稳定,提高了三相触头的定相合闸准确率;采用基于数控开关电源的自适应吸持电压控制策略可以兼顾吸持过程的可靠性和低功耗要求;由三个电磁系统独立控制每一相触头可实现更为精准的三相电流零电流分断。
2 工作原理
本文以课题组自行研制的斜极面交流接触器为单极控制对象,提出一种异步组合式的智能交流接触器,图1为该接触器智能控制系统的原理框图。采用改进的降压(buck)斩波电路作为线圈控制电路,实现对线圈的闭环控制以及供电电源切换;线圈电压采样电路用于采集线圈的励磁电压信号,判断输入电压是否处于线圈工作电压范围内;线圈电流采样电路用于采集线圈的励磁电流信号,为吸合过程的电流滞环比较跟踪和自适应吸持控制做准备;三相电压和三相电流采样电路用于采集交流接触器触头上的电压电流信号,以实现交流接触器的定相分合闸控制;主控芯片采用IAP15W4K58S4芯片。

图1 组合式交流接触器智能控制系统框图
为实现更为精准的定相分合闸控制,本文从集中管理为出发点,设计了组合控制方案,由一个主控芯片实现对三台交流接触器的协调控制。图2为组合式交流接触器3相1重斩波电路拓扑结构,三个斩波电路共用一个电源,可大幅度减小体积。而多个结构相同的斩波电路使电源电流脉动次数和频率增加,可以有效减少电源电流引起的感应干扰,降低了对输入侧的滤波要求,可进一步减小装置的体积。

图2 组合式交流接触器线圈控制电路拓扑结构
3 组合式交流接触器全过程控制策略
3.1 合闸控制策略
电磁系统作为接通和分断主回路的动力来源,决定了整个交流接触器的动态性能,而线圈电流直接影响电磁吸力,更是核心控制对象。滞环比较控制作为一种常用的电流跟踪控制策略,具有结构简单、响应快、不需要载波、稳定性高等优点。因此在交流接触器吸合过程中采用线圈电流滞环比较跟踪的闭环控制策略,通过给定电流参考值使得接触器在每次动作过程中的电磁吸力曲线保持一致,从而保证了动作时间的稳定性。图3为线圈控制电路,其中V2数控开关电源,Vs为市电,由于线圈模型较复杂,以Lcoil和Rcoil串联的形式代替。
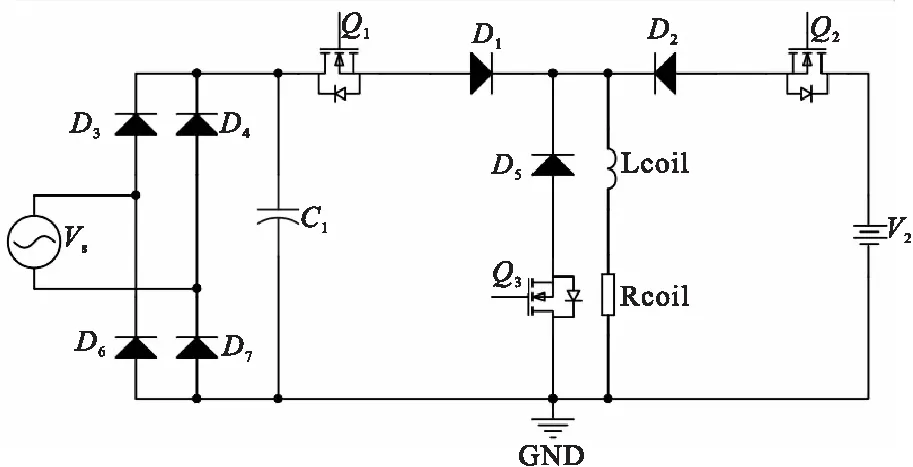
图3 线圈控制电路
市电以及主回路中的高频斩波使线圈电流中夹杂着大量的高次谐波,因此本文采用霍尔电流传感器采集线圈电流,避免其对单片机和其他敏感元件产生干扰。根据滞回跟踪比较控制原理以及线圈实际电流if与线圈设定的参考电流ir之间的关系,吸合过程中线圈控制电路可分为三种工作状态:
(1)
式中,e为比较阈值。
电流的跟踪误差为:
Δ=ir-if
(2)
具体工作流程为:当Δ>e时,Q1导通,加在线圈上的电压为Vs经过整流滤波后的电压;当e>Δ>-e,开关管维持原有的开关状态;当Δ<-e时,Q1截止,线圈电流通过Q3、D5回路续流。而D2、Q2、V2与线圈构成低压保持回路,其中D2可以防止两个供电电源同时导通。
在Simulink中搭建了控制系统的联合仿真模型,如图4所示,其中Recurdyn为动力学仿真软件,用于计算铁心和触头位移及碰撞弹跳情况,以分析控制策略的性能。

图4 控制系统仿真模型搭建
降低动静铁心及动静触头接触时的碰撞能量是减小触头弹跳的有效方法。但减少碰撞能量势必会增加吸合时间,如何恰当的取舍是控制参数设置的关键。本文采用电流阶梯扫描型的参数设置方式,在接触器起动时给线圈施加一个较大的电流参考值,使铁心获得较大的初速度,随后按阶梯状逐步减少参考电流,以减小铁心和触头的闭合末速度,从而到达减小触头弹跳的目的。图5为该接触器吸合过程的电流曲线和触头弹跳曲线。
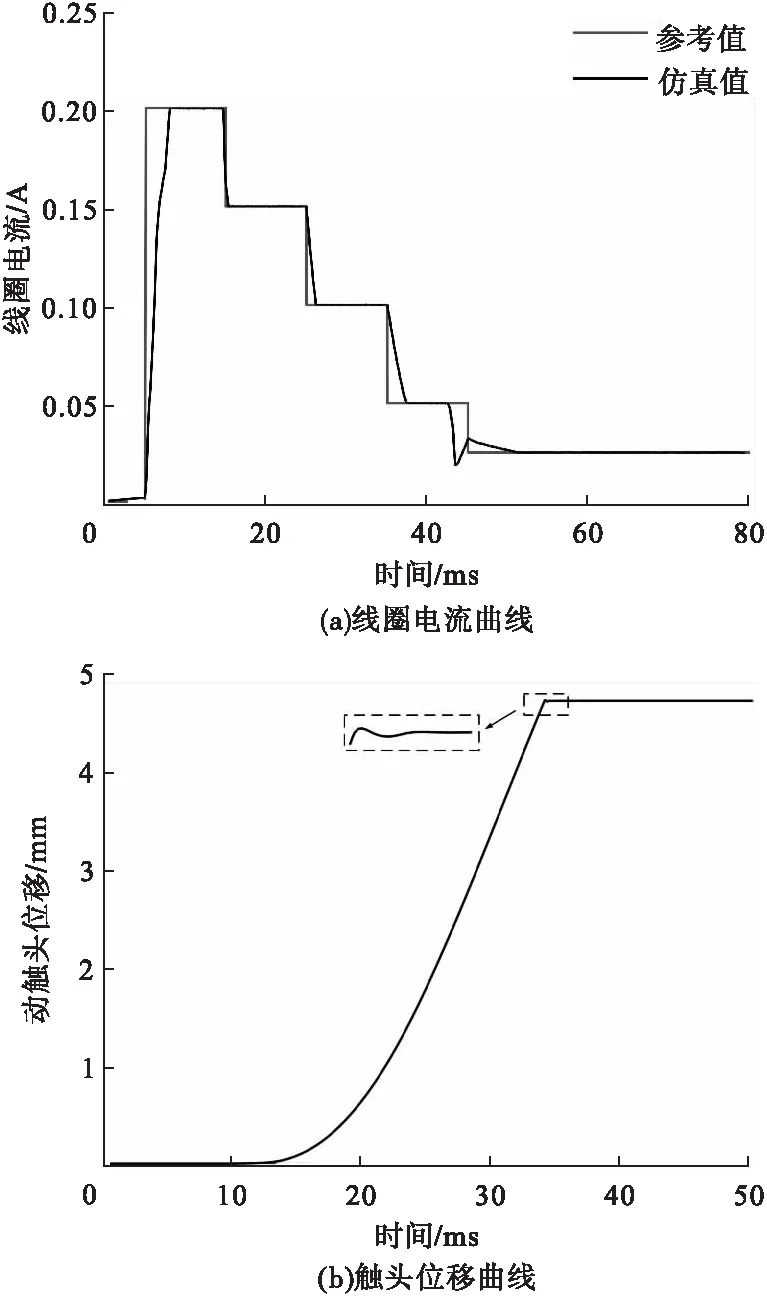
图5 吸合过程仿真波形
从图5(a)可见,线圈电流变化趋势与设定的参考值基本保持一致,说明了滞环控制的有效性。从图5(b)中可以看到,经过控制后的触头弹跳时间和幅值非常小,说明该控制可以有效抑制触头弹跳。
触头接通时,触头间产生的电弧会对触头产生侵蚀,影响触头的电寿命,而通过智能控制使触头在电压过零时合闸可有效减少电弧。对于中性点接地的三相负载和中性点不接地三相负载的电压零点是不同的,本文以最常见的三相负载星形无中性线连接方式为例,说明三相触头零电压合闸时序的建立。
三相触头零电压合闸控制时序图如图6所示。在t1时刻控制系统得到合闸指令,随后A相开始检测电压零点,触头电压到达零点后,单片机软件延时tdA,A相线圈开始激磁,动作机构延时tcA后,A相在电压零点合闸。在A相电压零点检测完成的同时,开启对B、C两相电压零点的检测,由时序图可知,先到零点者为C相,据此实现相序的识别。B、C两相在A相合闸后,C相(即合闸第二相)将会与A相形成回路,此时C相的触头电压零点将不再是原来的相电压零点,而是在相电压UA等于UC处(即A相触头电压过零后30°),单片机通过调整tdC,使C相在此处合闸。而B相作为最后一相,则根据其触头电压零点进行合闸,原理与A相触头合闸一致。

图6 零电压合闸时序图
3.2 自适应吸持控制策略
无论是基于恒定电流吸持还是恒定电压吸持均存在缺陷性。本文以减少能耗为目的,提出了一种自适应吸持电压控制策略。利用基于数控开关电源输出可调的特点,将吸持电压初始值设定为一个较低的值以实现节能运行,而针对交流接触器在长期通电及环境温升影响下线圈电阻增大可能引发的一系列不可靠吸持问题,以线圈电流和线圈电压为反馈参量,通过单片机计算线圈电阻并与线圈电阻初始值进行比较,以此为依据调整数控开关电源输出电压,完成自适应吸持控制,保证了接触器即使处于较低的吸持电压下,依然具备较高的吸持稳定性,其控制框图如图7所示。
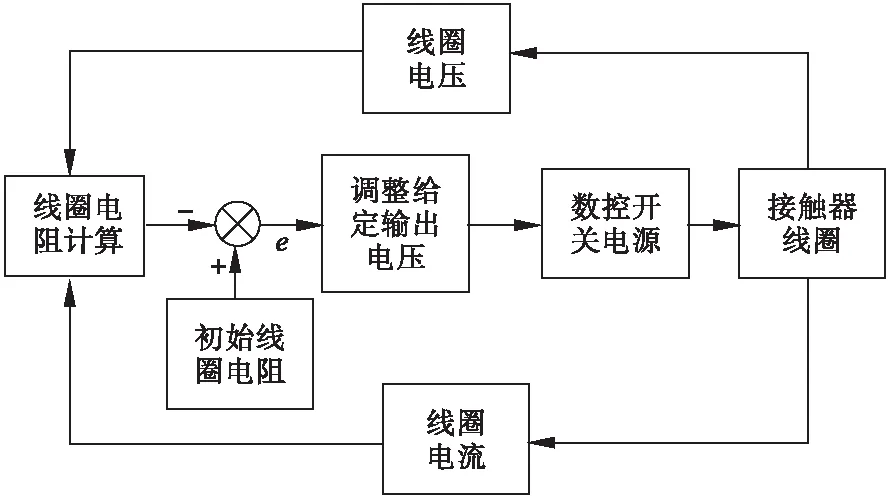
图7 自适应吸持控制系统框图
3.3 零电流分断控制策略
相较于合闸过程对触头的影响,分断过程电弧对触头的侵蚀更为严重,也是影响交流接触器电寿命最主要的因素。因此,如何克服机构动作的分散性,提升触头在电流过零处分断的准确率成了重要研究方向之一。与三相触头零电压合闸原理相似,三相负载中性点是否接地,将影响三相触头电流的过零点。本文分析了三种接线方式下,三相触头分断电流的时序关系,通过单片机对各相电流零点的判断以及计算软件延时,实现三相触头的零电流分断。下面同样以三相负载星形无中性线连接方式为例,说明零电流分断时序的建立。图8为零电流分断时序图,t1时刻单片机得到分闸命令,此时开始检测A相电流零点,检测到A相电流零点并经过tdA后,控制A相的接触器线圈断电,经过动作机构固有延时tbA后,触头在A相电流过零分断。在A相分断后,B、C相形成回路,拥有同样的过零点,即落后A相5ms,根据这一原理使B、C相在电流过零点分断。至此,三相电流实现零电流分断。

图8 零电流分断时序图
由于实际运用中,零电流分断技术中触头并非控制在电流过零处分断,而是取电流过零前的一个小区域内分断,这是因为触头分开时刻过于接近电流零点可能导致电弧重燃。因此本文采用零前分断的零电流分断控制策略。
4 实验验证
为了验证该智能控制方案的可行性,在10A的负载电流下完成验证实验,图9为实验现场图。

图9 实验现场
4.1 滞环比较控制下的零电压合闸过程
该交流接触器在额定电压下无控制的吸合过程波形图如图10(a)所示,图10(b)为采用线圈电流滞环跟踪比较控制下,接触器吸合过程波形图。从图(b)可见,线圈电流变化趋势呈阶梯状,证明该控制的有效性。此外,相较于图(a)中该接触器无控制时1ms左右的触头弹跳时间,经过智能控制后触头弹跳有了大幅度的改善。
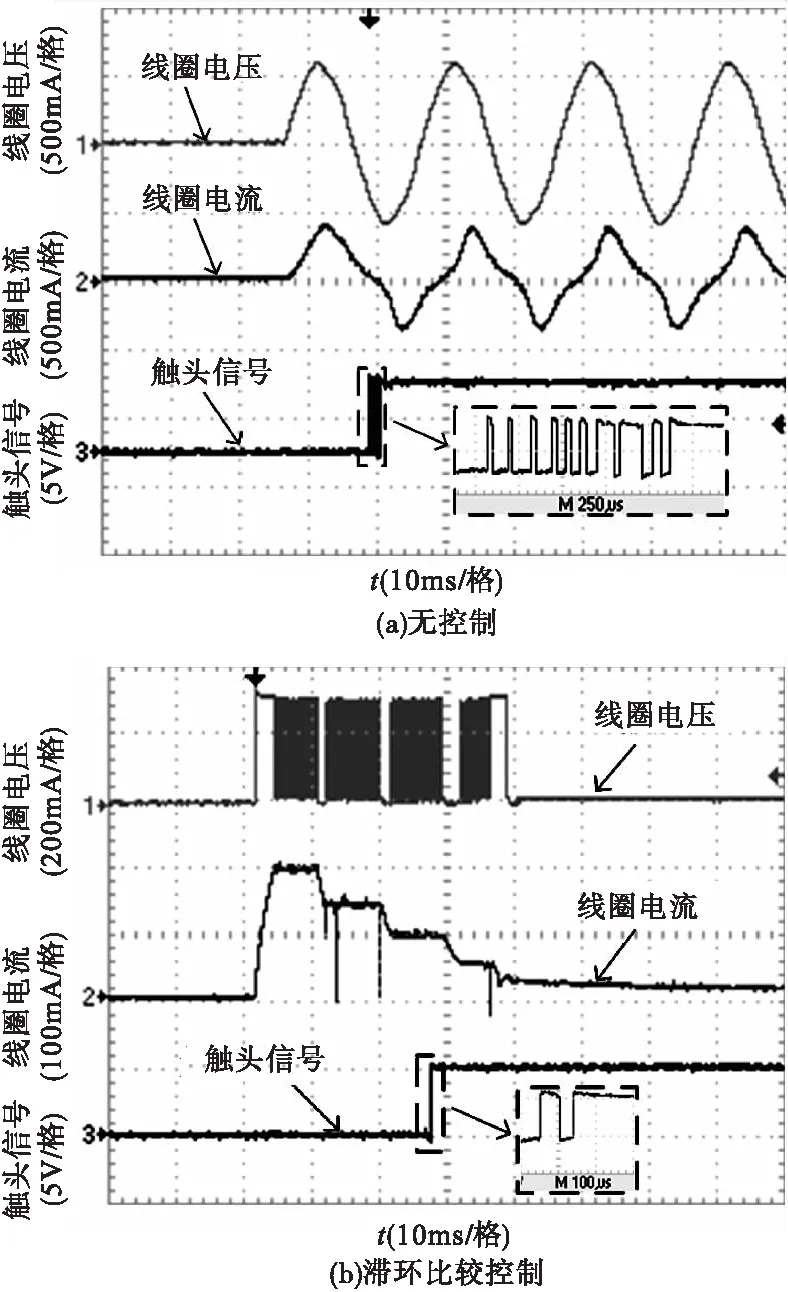
图10 吸合过程波形图
为验证控制系统在负载中性点接地和不接地连接方式下电压合闸控制的准确性,本文分别将三个单相负载按上述两种方式连接并进行实验,结果如图11所示。
图11中,UA、UB、UC分别为A、B、C三相的触头两端电压波形。如图11(a)所示,C相和A相零电压合闸时间差为3.33ms,合闸相角相差60°,B相和A相合闸时间差为6.67ms,合闸相角相差120°。如图11(b)所示,C相和A相零电压合闸时间差为1.67ms,合闸相角相差30°,B相和A相合闸时间差为6.67ms,合闸相角相差120°。实验结果表明该控制系统可有效控制三相触头的零电压合闸。

图11 零电压合闸
4.2 自适应吸持调整过程
为验证自适应控制策略的有效性,实验模拟交流接触器线圈电阻增大引发的不可靠吸持问题,在某时刻为线圈回路串入100Ω电阻(约为线圈电阻的10%),验证自适应吸持控制的有效性,实验波形如图12所示。

图12 基于线圈电流的自适应吸持实验结果
从图12可见,在t0时刻线圈回路串入电阻,随后线圈电流缓慢下降,在t1时刻电流达到设定的阈值,随后单片机输出信号,使保持电源输出电压上升,线圈电流随之上升,完成自适应调整过程。
4.3 零电流分闸过程
本文在负载电流为10A下,进行了中性点接地与中性点不接地三相负载的零电流分断实验,实验结果如图13所示。

图13 零电流分断波形图
由图13可见,对于中性点不接地的三相负载,由于首开相断开后,其余两相将形成回路,因此具有相同的电流零点,均落后首开相5ms。针对中性点接地的三相负载,A相触头完成过零分断后,C相在与A相分闸后3.33ms处分断,而B相则在A相分闸后6.67ms处分断。实验结果表明,该控制系统可以有效控制三相触头于电流过零处分断。
5 结论
本文提出了一种基于异步组合式交流接触器的全过程智能控制策略。根据交流接触器的各个工作过程中的特性分析,对每个工作阶段采不同的控制策略,最后就该智能控制系统进行了不同连接方式下的三相负载的实验验证,结果表明,该控制系统可以有效实现以下功能:
(1)采用滞环跟踪比较控制策略,实现了三相触头的零电压吸合,有效改善了接触器闭合过程的触头弹跳并提高了接触器动作时间的稳定性。
(2)自适应吸持电压控制策略兼顾了吸持过程的可靠吸持与低能耗,并保证了交流接触器长期通电下的工作可靠性。
(3)利用组合式交流接触器的异步控制的优点,在分断过程中具有高可靠性和准确率的零电流分断。
猜你喜欢
数理化解题研究(2020年13期)2020-05-07 03:29:02
数学物理学报(2019年5期)2019-11-29 07:46:30
电子制作(2019年7期)2019-04-25 13:17:20
电工技术学报(2017年15期)2017-08-31 19:02:23
高中生·天天向上(2016年9期)2016-11-22 09:10:34
电测与仪表(2015年20期)2015-04-09 11:53:46
水电站机电技术(2014年4期)2014-10-13 08:30:12
电测与仪表(2014年15期)2014-04-04 12:05:18
电测与仪表(2014年8期)2014-04-04 09:19:36
河南科技(2014年4期)2014-02-27 14:07:19
