
HVDC换相失败对转子绕组匝间短路调相机的影响分析
2021-07-14 02:04马明晗贺鹏康李永刚姜猛武玉才
电机与控制学报 2021年7期
马明晗, 贺鹏康, 李永刚, 姜猛, 武玉才
(华北电力大学 新能源电力系统国家重点实验室,河北 保定 071003)
0 引 言
调相机是一种不带机械负载的同步电动机,其主要功能是向电网输送无功功率,维持电网的相对稳定[1],“十三五”期间我国已逐步在高压直流输电线路送受两端加装了新一代大容量调相机。调相机的安全可靠运行对提高电网电能质量、维持电网电压稳定有着重要意义。
转子绕组匝间短路是大型同步电机最为常见的故障,并网不久的同步调相机同样面临产生该故障的风险。以往针对发电机转子绕组匝间短路故障的特征分析和诊断方法研究,有许多可以借鉴之处。文献[2]分析得出转子绕组匝间短路故障会导致发电机产生谐波磁场,谐波磁场会在电枢绕组中感应出谐波电动势和谐波电流。谐波电流产生的旋转磁场转速与转子旋转转速不同步,励磁绕组中会感应出附加的谐波电流。文献[3]采用多回路法计算出转子匝间短路故障时励磁电流的大小,将计算结果代入Maxwell建立的转子二维模型当中,通过麦克斯韦应力张量法得出转子不平衡磁拉力;文献[4]利用有限元方法分析了发电机空载工况下的励磁绕组匝间短路故障,结果显示匝间短路的故障程度与故障位置都会对气隙磁密的大小与分布产生影响。文献[5]通过对发电机的励磁绕组匝间短路故障进行有限元仿真,提出利用电磁转矩的变化进行匝间短路的检测方法。文献[6]推导了转子绕组匝间短路严重情况下的不平衡磁拉力计算公式,得出在电机空载情况下转子振幅的大小与通过转子的励磁电流平方成正比,提出利用空载升励监测转子绕组匝间短路的思想。文献[7-8]提出了利用探测线圈采集励磁绕组漏磁场信号来诊断转子绕组故障的检测方法。然而,转子绕组匝间短路由于其故障影响较轻微[9],故障往往不能被及时发现,现有诊断方法对轻微匝间短路故障的灵敏度不高,机组带病运行的情况较为常见。
高压直流输电换流器采用无自关断能力的晶闸管作为换流元件,当系统交流侧发生故障时容易导致其换流器发生换相失败[10-12],对并联于换流站的同步调相机产生冲击,造成带病运行机组的故障特征扩大,甚至造成某些监测指标短期越限,影响机组的运行安全。据统计,2012年华东地区已建成的六回高压直流输电线路,全年共计发生54次换相失败[13],换相失败故障较为常见。因此,研究HVDC换相失败对转子绕组匝间短路调相机的影响,一方面对带病运行调相机的故障预警有着指导意义,另一方面对轻微匝间短路故障的准确诊断也具有参考价值。
本文以某300 MVar大型双水内冷同步调相机为研究对象,采用Simulink仿真软件搭建含同步调相机的高压直流输电模型,并将此运行数据导入到Maxwell/Simplorer软件联合仿真,分析换流站逆变器换相失败对存在转子绕组匝间短路故障的调相机的运行影响。
1 机网故障分析
1.1 匝间短路故障分析
调相机转子绕组发生匝间短路时,其转子绕组可以被分为正常回路(电流为if)和故障附加回路(电流为ifkL),其等效电路如图1所示。

图1 转子绕组匝间短路等效电路图Fig.1 Equivalent circuit diagram of short circuit between turns of rotor winding
由上图可以得出转子绕组匝间短路时其正常励磁回路和励磁故障附加回路的电压方程分别为:
EZF=pψf+(rf+RZF)if+rfkifkL;
(1)
0=pψfkL+rfkLif+(rf+RfkL)ifkL。
(2)
式中:EZF表示励磁系统的电压;RZF表示励磁系统的内阻;ψf、rf为正常回路的磁链和电阻;ψfkL、rfkL为故障附加回路的磁链和电阻;RfkL表示故障附加回路的过渡电阻;if、ifkL表示回电流。
由此可知,正常励磁回路产生的磁动势和故障附加回路产生的磁动势矢量相加之和即为故障绕组在气隙中产生的磁动势,有
ffd,m(xr)=ffd,n,m(xr)+ffd,f,m(xr)。
(3)
其中ffd,n,m和ffd,f,m表示第m个短路线圈的正常励磁回路和故障励磁回路的磁动势。
由图1可以看出,在发生转子绕组匝间短路时,被短路匝数流过的励磁电流很小,其数值基本可以忽略,因此,存在转子绕组匝间短路故障调相机的励磁磁动势可等效为正常励磁磁动势与短路匝绕组通入反向励磁电流产生磁动势的叠加。
正常情况下转子励磁磁势呈对称分布,经傅里叶分解后仅含奇数次谐波:
F(θr)=F1cospθr+F3cos3pθr+
F5cos5pθr+…+Ficosipθr。
(4)
式中:Fi为第i次谐波磁势幅值,i为奇数;θr为转子空间机械角度;p为调相机极对数。
被短路的励磁绕组通入反向励磁电流产生的励磁磁势具有非对称性质,经过傅里叶分解可以表示为
(5)
式中:Q为短路匝数;n为正整数;If为调相机励磁电流;α为转子磁极宽度。
由此可见,转子绕组匝间短路在调相机主磁场中产生了新的分数次特征谐波,调相机磁场发生了畸变。
分布不均匀的磁场会使调相机转子产生不平衡的磁拉力,引起转子振动,由于调相机转子与定子之间气隙较小,各种故障短路所引起的单边磁拉力不均匀使调相机定转子之间存在碰撞风险[15]。在二维求解域中,Maxwell应力张量法表明,电机在磁场中每单位面积受到的磁拉力表达式为
(6)

由麦克斯韦应力方程,转子外圆表面任一点的磁拉力为
(7)
式中:θs表示调相机机械角度;μ0表示调相机气隙间的空气磁导率。
根据麦克斯韦应力张量法,径向不平衡磁拉力可表示为
(8)
调相机径向不平衡磁拉力的X轴和Y轴分量可以依次表示为:
(9)
式中:R表示调相机转子半径;L表示调相机转子轴长度。
将式(9)进行离散化处理可得:
(10)
不平衡磁拉力的模值F可表示为
(11)
1.2 换相失败影响分析
在逆变器晶闸管导通时,反向电压未能及时关断晶闸管,或者退出运行的晶闸管加入反向电压之后未能将其及时关断,电压反转之后使本应处于关断状态的发生阀倒换相,最终导致换相失败[16]。在直流换相过程中,等值电路满足
(12)
式中:Lm为等效电感;io(t)为开通时逆变桥上流过的电流;ic(t)为关断状态时逆变桥上流过的电流;E(t)为逆变桥所承受的线电压。
对式(12)积分,可得晶闸管电压—时间换相面积A与关断角α之间的关系为
(13)
式中:Id为直流电流;μ为换相角;ω为角频率。
由于晶闸管恢复阻断能力最小关断角为αmin,当α′<αmin时将会发生换相失败。减小直流电流Id,换相面积也会变小,可以减少换相失败的机率,也对换相失败的恢复起着积极的作用[17-18]。在发生换相失败时,调相机励磁电流将会在短时间之内增加,调相机机端电压会随之减小,随着系统自身的恢复能力其励磁电流和机端电压将会逐渐恢复到原有状态[19-20],励磁电流与机端电压随时间变化曲线如图2和图3所示。
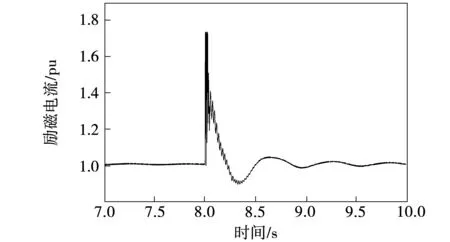
图2 励磁电流变化图Fig.2 Excitation current change diagram
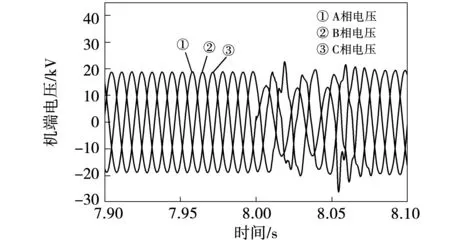
图3 机端电压变化图Fig.3 Diagram of terminal voltage change
由图2和图3可知,换相失败发生时,调相机励磁电流短时间内急剧上升,数值最大时可以达到额定电流的1.7倍;调相机机端电压下降至额定电压的0.85倍左右。
2 实验仿真分析
为研究HVDC换相失败对存在转子绕组匝间短路故障调相机运行的影响,本文以青海柴达木换流站安装的一台300 MVar双水冷同步调相机为研究对象(参数见表1),采用Simulink+Maxwell/Simplorer进行联合仿真,分析其直流侧换相失败前后故障调相机气隙径向电磁力密度及转子不平衡磁拉力的变化特征。

表1 300 MVar调相机运行参数
2.1 调相机电磁仿真模型
为了验证不同励磁电流情况下调相机不同程度匝间短路时转子磁拉力的变化规律,本文利用Maxwell搭建了调相机二维有限元物理模型,如图4所示。
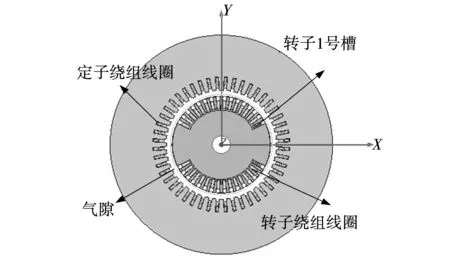
图4 调相机二维有限元模型Fig.4 Finite element physical model of the SC
网格剖分后的每个网格单元都满足下式所示的调相机二维磁场数学模型:
(14)
其中:AZ为矢量磁位;μ为磁导率;JZ为Z轴电流密密度分量;AZ0为边界T的已知值,符合第一类边界条件。
2.2 含同步调相机的高压直流输电模型
本文以青海—西藏±400 kV含同步调相机的高压直流输电系统为研究对象,采用Simulink仿真软件搭建的主电路拓扑结构如图5所示,整流侧是采用2个通用桥模块串联而成交流的12脉冲变换器。逆变环节系统结构和整流侧系统结构相似。为了抑制交流系统谐波分量,在交流侧并联了交流滤波器。考虑到绝缘性和经济性,300 MVar同步调相机经升压变压器接入330 kV电压等级的交流母线。

图5 含同步调相机的高压直流输电拓扑图Fig.5 Topological diagram of high-voltage direct current transmission with SC
图5中,Id、Ud为系统直流电流和直流电压,ES、ZS、ES1、ZS1分别为整流侧和逆变侧交流系统的等值电动势与等值阻抗,R代表直流电路实际电阻。AnsoftSFunction模块主要起Simulink与Simplorer之间仿真数据传递的作用。
2.3 控制策略
2.3.1 高压直流输电系统控制策略
高压直流输电系统控制框图如图6所示,整流侧采用定电流控制,触发角限制作为辅助控制,以防串联在一起的晶闸管导通失败,对系统正常稳定运行产生影响。逆变侧采用定熄弧角控制、定电流控制,触发角限制作为辅助控制。
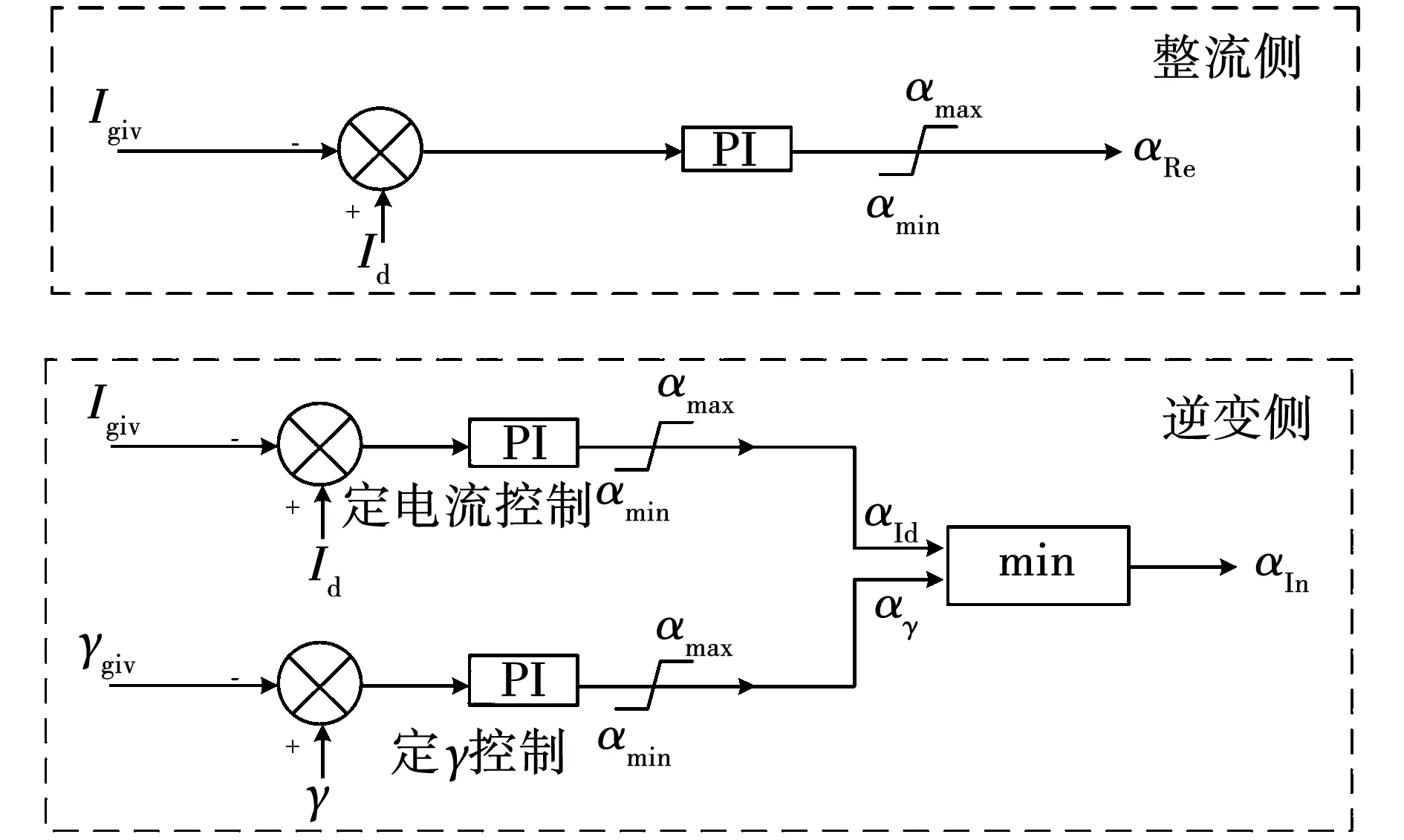
图6 高压直流输电系统控制策略Fig.6 Control strategy of HVDC transmission system
图6中,Igiv、γgiv分别代表电流和熄弧角给定值,Id、γ分别代表电流和熄弧角实测值,αId、αγ分别为定电流控制和定熄弧角控制计算得到的晶闸管触发延迟角,αmax、αmin分别为触发延迟角最大与最小限制值,αRe、αIn分别表示整流侧和逆变侧晶闸管延迟触发角命令。
2.3.2 同步调相机控制策略
同步调相机的控制拓扑如图7所示,其控制策略采用定电圧控制,最大励磁电流限制作为辅助控制。给定值与实际值之差经过PI控制器控制调节励磁电压,控制无功功率输出已达到控制调相机机端电压的目的。如果调相机励磁电流超过最大允许范围限制,其限流控制信号Ifmax_mark立即将控制方式切换到最大瞬时励磁电流限制,确保调相机励磁电流处于最大励磁电流限制值Ifmax_ref以内。该控制方法的优势在于采用了定电圧与定励磁电流的双闭环控制方式进行调节。
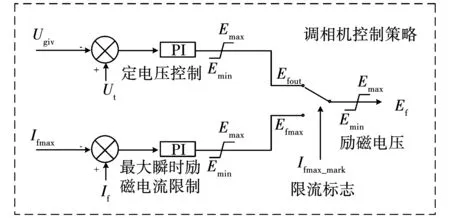
图7 同步调相机控制策略Fig.7 SC control strategy
2.4 Simulink+Maxwell/Simplorer场-路-网联合仿真模型
利用Simplorer搭建了同步调相机有限元与Simulink联合仿真模型,其主电路拓扑结构如图8所示。Simulink仿真模型由图5所示的含同步调相机高压直流输电拓扑图所集成,U、V、W相受控源与励磁电流受控源数据都来自于Simulink仿真模块,R1、R2、R3为线路电阻,L1、L2、L3为调相机内部电感,R4、R5、R6为调相机内部电阻。Uin、Vin、Win、Fieldin分别为调相机三相电源输入与励磁电流输入,Uout、Vout、Wout、Fieldout分别为调相机三相电源输出与励磁电流输出。

图8 Simulink+Simplorer/Maxwell联合仿真拓扑图Fig.8 Simulink+Simplorer/Maxwell co-simulation topology diagram
2.5 结果分析
2.5.1 转子绕组匝间短路电磁特征分析
调相机带额定负载时,在图8所示的调相机二维模型当中设置1号槽内励磁绕组分别发生1匝、2匝、3匝、4匝短路,调相机气隙磁密的波形及其谐波分析如图9所示。
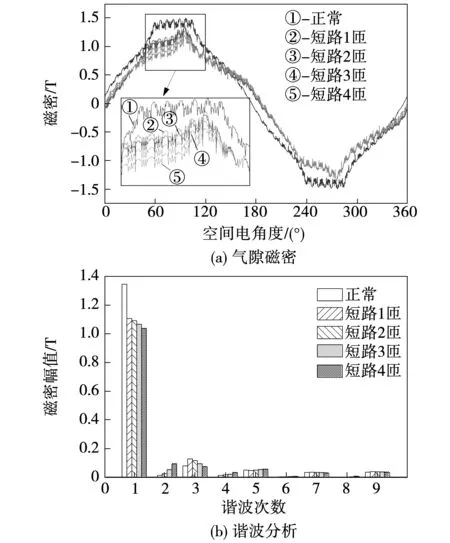
图9 气隙磁密Fig.9 Air gap flux density
由图9可见,匝间短路故障前后调相机气隙磁密变化明显,正常情况下气隙磁密分布均匀,对其进行傅里叶分析发现,仅存在奇数次谐波;而当调相机转子绕组发生匝间短路故障后,气隙磁密产生畸变,出现偶数次谐波,并且随着匝间短路程度增大,偶次谐波含量也增大,与前文理论推导结论一致。
图10所示为转子圆周表面的径向电磁力密度,从中可以看出,转子绕组发生匝间短路前,径向电磁力密度关于转子磁极中心线呈对称分布;转子绕组发生匝间短路后,励磁绕组有效匝数减少,电磁力密度下降,故障极与非故障极表现出明显的不对称性,且随着故障程度的加深,电磁力密度波形畸变加重,不对称性增强。
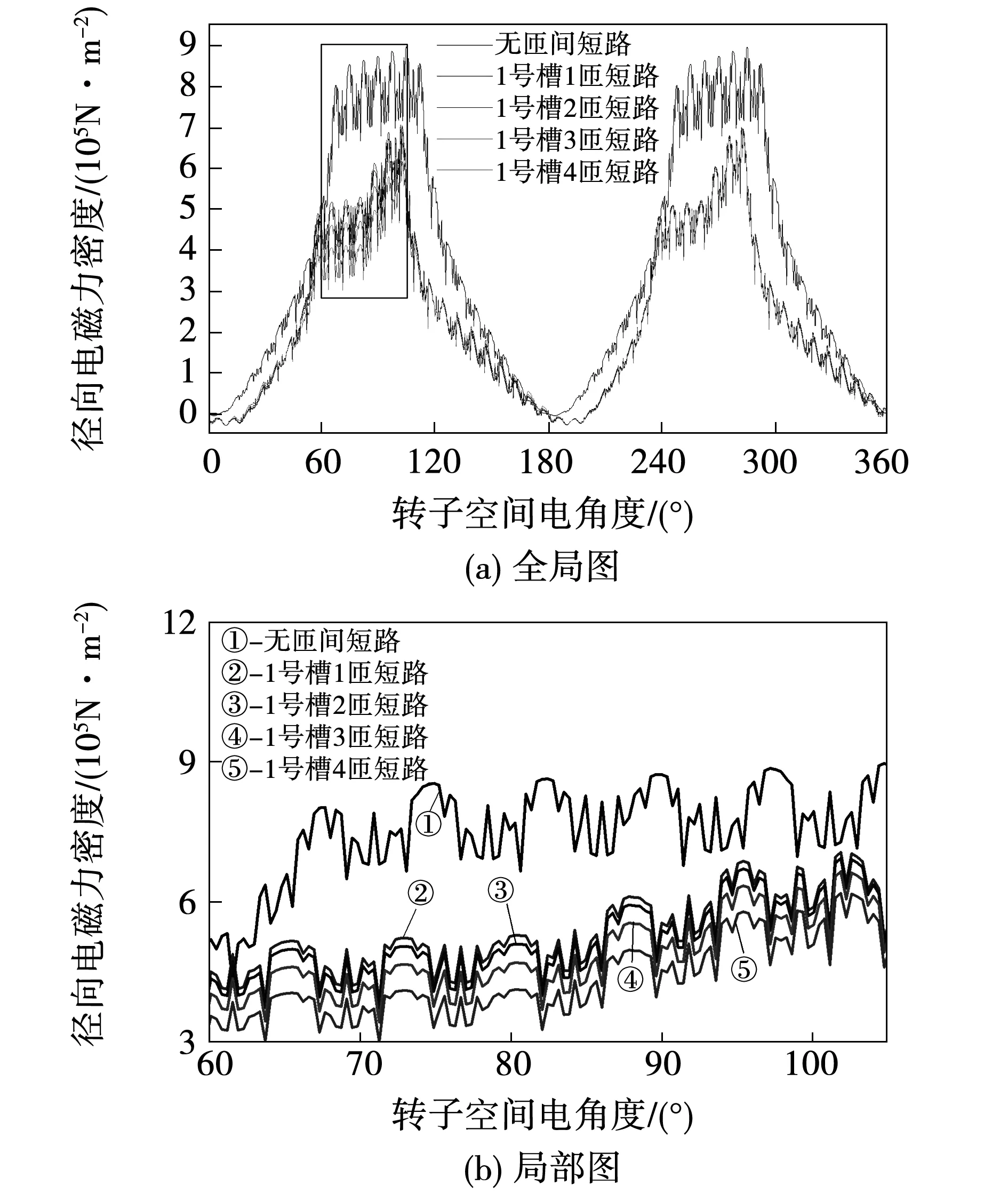
图10 径向电磁力密度Fig.10 Radial electromagnetic force density
图11所示为转子所受不平衡磁拉力与励磁绕组匝间短路故障程度之间的关系图,调相机在未发生匝间短路情况下额定运行时,转子所受到的不平衡磁拉力几乎为0;匝间短路故障会引起不平衡磁拉力增加,且随着匝间短路程度的增加,不平衡磁拉力越大。
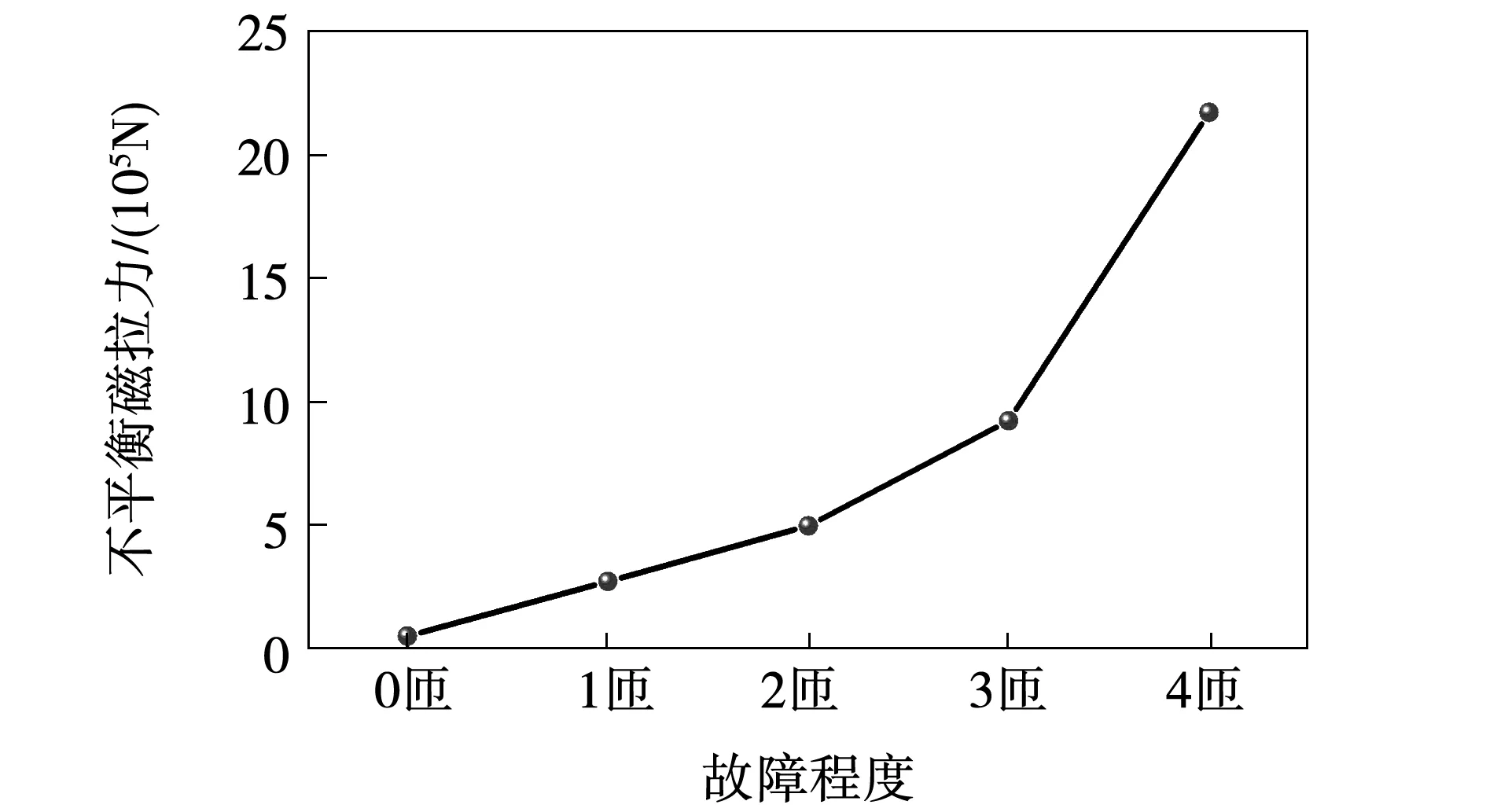
图11 不平衡磁拉力与故障程度的关系Fig.11 Relationship between unbalanced magnetic pull and degree of failure
2.5.2 换相失败对带病运行机组的影响分析
为研究同步调相机在换相失败影响下转子绕组匝间短路电磁特征变化,在图5所示拓扑图的逆变侧设置输电线路c相电压单相阻性接地故障,设置故障时刻为8.0 s,故障持续时间为50 ms。同样设置其转子1号槽励磁绕组分别短路1匝、2匝、3匝、4匝的情况下在Simulink+Simplorer/Maxwell仿真软件当中联合仿真。
图12所示为换相失败前后以及转子正常和1匝短路故障时的气隙磁密。转子绕组发生1匝短路时,由于线圈有效匝数减小,气隙磁密幅值较正常时减小;换相失败后由于励磁电流增大,导致气隙磁密幅值整体增大。从图13所示的谐波分解图可以看出,换相失败导致气隙磁密基频分量与偶次谐波含量增大,这将导致带病运行调相机故障特征增大。

图12 气隙磁密大小对比图Fig.12 Comparison of air gap magnetic density
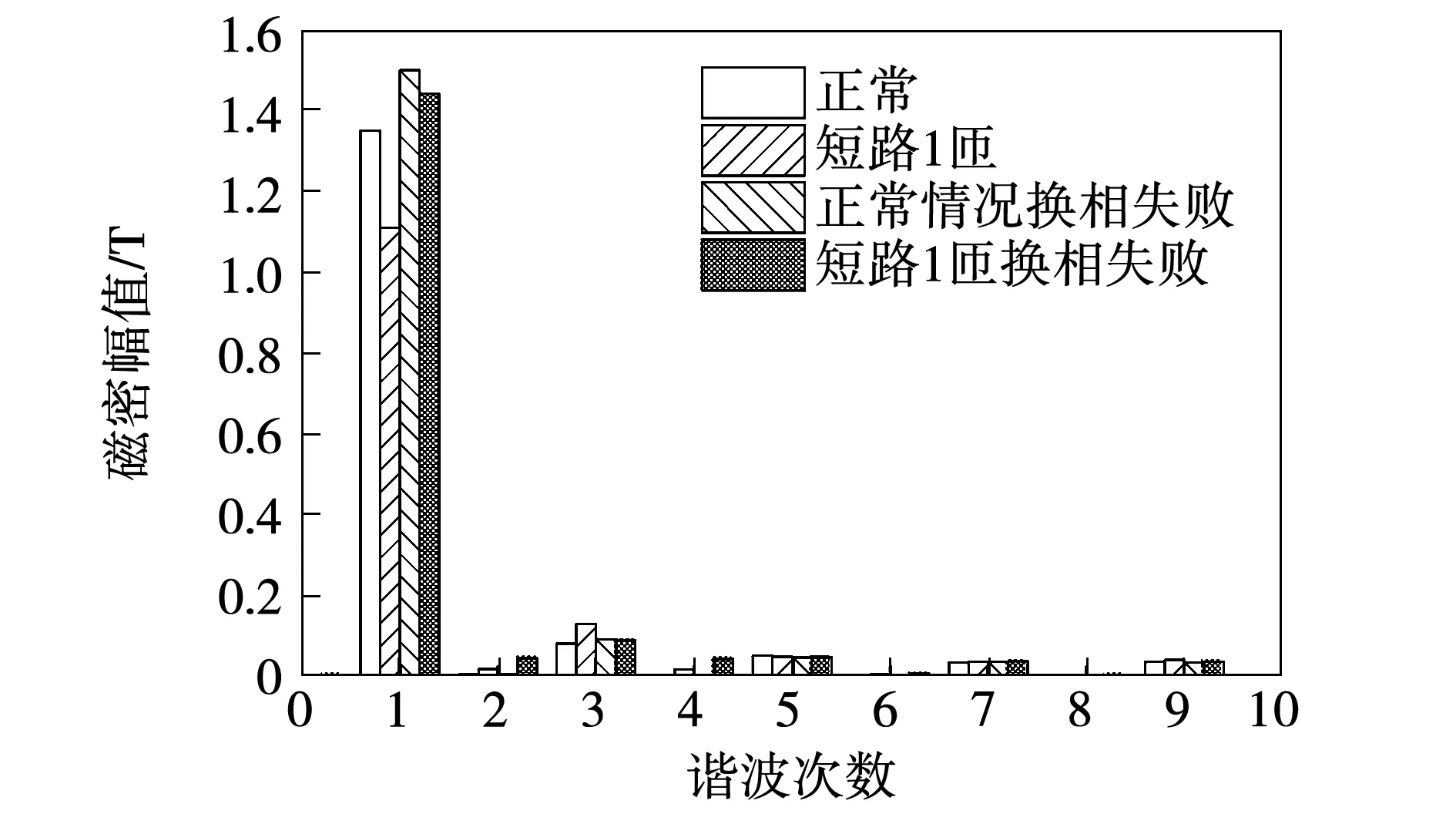
图13 气隙磁密谐波分解图Fig.13 Harmonic decomposition diagram of air gap magnetic density
图14所示为转子圆周表面的径向电磁力密度,换相失败后由于励磁电流与机端电压共同作用导致调相机气隙径向电磁力密度整体增大;随着匝间短路程度的增强,励磁绕组有效匝数减少,其径向电磁力密度明显弱于正常时的径向电磁力密度;径向电磁力密度畸变程度随着匝间短路增大而不断增大。
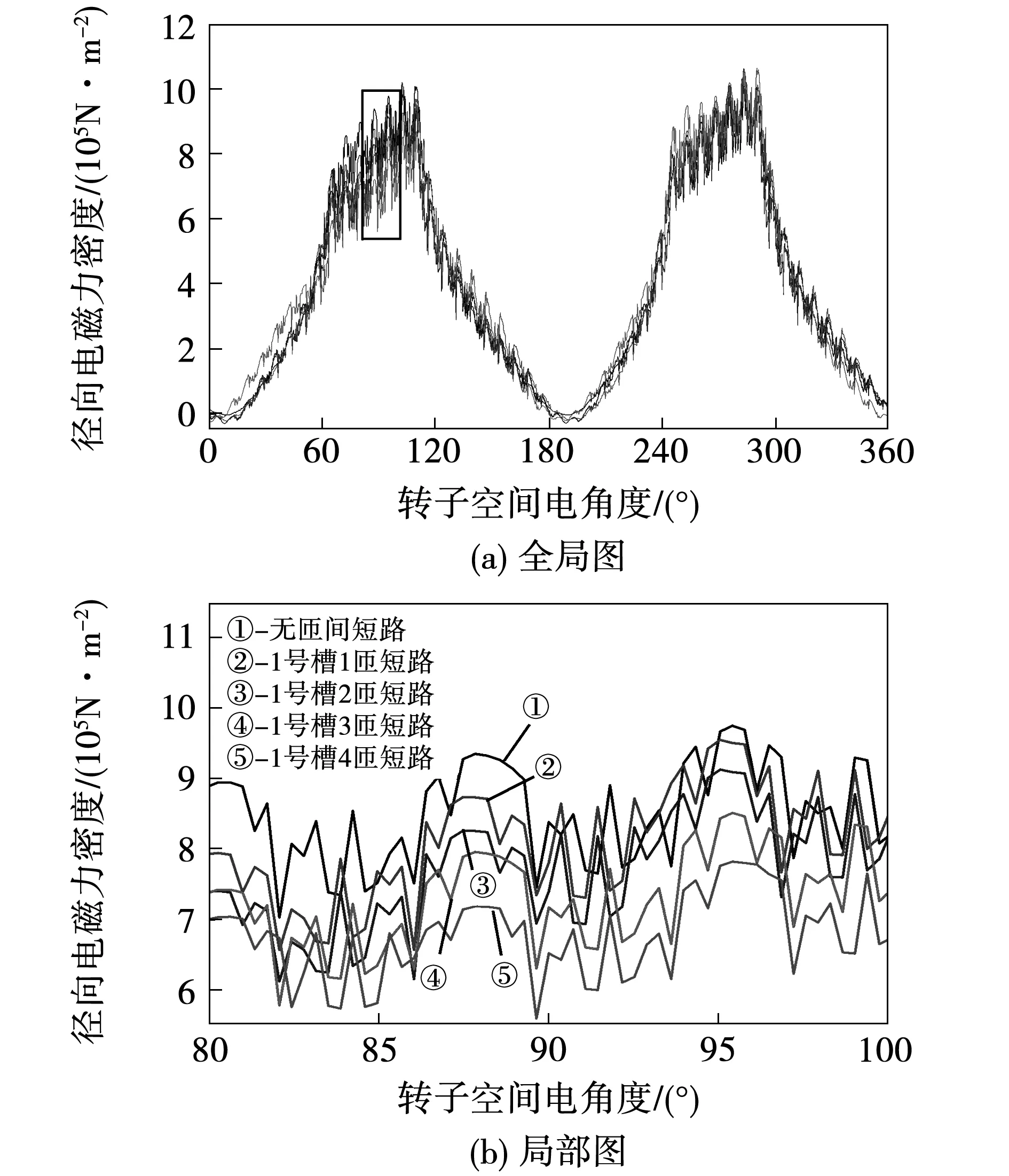
图14 换相失败情况下径向电磁力密度Fig.14 Radial electromagnetic force density under commutation failure
换相失败情况下不同程度励磁绕组匝间短路调相机转子所受到的不平衡磁拉力如图15(a)~图15(e)所示。
由图15可见,调相机发生换相失败时由于励磁电流与机端电压短时间内波动剧烈,导致其磁拉力急剧增大,随着系统的自我恢复能力逐渐恢复至稳定状态;匝间短路的程度越大,其换相失败导致不平衡磁拉力变化的幅值越大,4匝短路时其幅值接近500 kN;随着匝间短路程度增大,其故障恢复能力也逐渐减弱,未发生匝短路时,不平衡磁拉力需要400 ms即可恢复至稳定状态。4匝短路时,不平衡磁拉力需要900 ms才可恢复至稳定状态。可见,带病运行调相机在换相失败的影响下,转子所受不平衡磁拉力变化情况更加复杂。随着故障程度的加深,换相失败恢复期间不平衡磁拉力的最大幅值增加,稳态恢复时间延长。这将使转子振动状态恶化,换相失败恢复期间存在机组轴振超标甚至是转子扫膛的风险。

图15 换相失败状态下不同短路匝数不平衡磁拉力Fig.15 Unbalanced magnetic tension of different short circuit turns under commutation failure state
为了进一步研究其变化规律,图16取短路匝数0~4匝情况下发生换相失败时间段的不平衡磁拉力进行傅里叶分解,与未发生换相失败时的傅里叶分解结果进行对比。对比结果表明,在系统发生换相失败后,直流分量与倍频增幅较明显。虽然直流分量增大不会导致转子产生振动,但在此值长期作用下易使绕组发生一定的形变,倍频成分的增大将会引发转子产生与其同频的振动响应。因此,系统换相失败导致转子不平衡磁拉力谐波增大,这将会进一步引起转子振动状态的恶化。
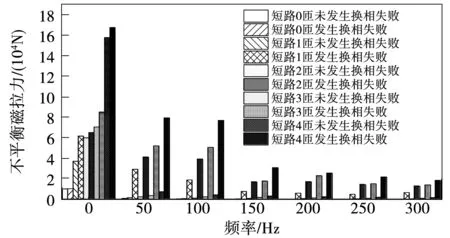
图16 不同短路匝数下同步调相机换相失败与未发生换相失败不平衡磁拉力频谱对比图Fig.16 Comparison of unbalanced magnetic tension spectrum between failed commutation failure and no commutation failure occurred in SC commutation under different short circuit turns
研究结果表明,换相失败使匝间短路的电磁和机械故障特征均得到了放大,可以对换相失败期的调相机进行特征参数提取,实现调相机转子绕组轻微匝间短路的故障识别。
3 结 论
本文以一台300 MVar双水内冷调相机为研究对象,基于Simulink/ANSYS构建了含同步调相机的高压直流输电的场-路-网耦合模型,研究了换相失败前后,带转子绕组匝间短路故障运行调相机的气隙磁场和转子所受不平衡磁拉力的变化特征,得到以下结论:
1)转子绕组匝间短路会使同步调相机气隙磁密与径向电磁力密度减小,气隙磁密偶次谐波幅值随转子匝间短路的严重程度而增加,谐波幅值可反应转子匝间短路故障的严重程度;转子所受不平衡磁拉力大小与匝间短路程度呈正相关性。
2)换流站逆变器换相失败导致故障调相机气隙磁密与径向电磁力密度整体增大,其基频谐波与倍频谐波幅值均增大,气隙磁场畸变加重,振动状态恶化。
3)调相机带病运行时,网侧换相失败会引起不平衡磁拉力在短时间内变化剧烈,其幅值可以达到正常运行幅值的4~6倍,换相失败恢复期间存在机组轴振超标的风险,随着匝间短路程度增大,其故障恢复时间也有所增长。
4)HVDC系统发生换相失败时,调相机励磁迅速动作,带病运行机组不平衡性增强,匝间短路故障特征放大,这一现象可以用于诊断转子绕组上发生的轻微匝间短路故障。
猜你喜欢
防爆电机(2022年3期)2022-06-17
大电机技术(2022年1期)2022-03-16
河北电力技术(2021年2期)2021-07-29
上海大中型电机(2021年1期)2021-06-09
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
电子制作(2018年1期)2018-04-04
电测与仪表(2016年23期)2016-04-12
电机与控制应用(2015年2期)2015-03-01
城市轨道交通研究(2015年5期)2015-02-27
