
相位型空间光调制器的自参考标定方法
2021-07-14 14:09李儒佳高云晖曹良才
液晶与显示 2021年6期
李儒佳, 高云晖, 曹良才
(清华大学 精密仪器系,北京 海淀100084)
1 引 言
相位型空间光调制器(SLM)是一种可以对光的相位信息进行定量调控的数字器件,其被应用于诸多领域,如全息三维显示[1-3]、波前传感相位成像[4-6]、光操控[7-8]等。由于SLM调制面板每层材料对环境变化的响应不同、有限加工精度导致的液晶层厚度分布不均、液晶对调制电压的非线性响应等潜在因素,实际使用SLM进行相位调制时具有调制误差[9-11]。同时,由于SLM通过改变e光等效折射率调制相位,当SLM实际工作波长与预设工作波长不同时,相同的折射率也会调制出不同的相位。为了获得准确的相位调制,需要对SLM进行标定。
SLM的标定方法本质上是测量相位的方法。为此可使用传统的相位恢复算法[12-13],通过衍射强度信息迭代求解相位。相位恢复是一个优化问题,所得到的解是迭代产生的近似解。同时,由强度信息求解复振幅信息的过程是一个病态过程,利用含有噪声的实验数据求解时迭代计算的鲁棒性不强。因而,利用相位恢复的方法还无法高效定量地标定SLM的调制相位。同时,可利用 SLM的调制能力来模拟光学元件,如光栅[14]、菲涅尔波带片[15]等,通过测量所模拟的光学元件的傅立叶频谱强度变化,求解器件的调制相位变化。这种标定方法可定量地获得调制相位,光路抗干扰性强。但由于模拟一个完整的光学元件需要一定数量的SLM像素,通过该方法难以获得较高空间分辨率的测量结果。
干涉法利用干涉图记录相位信息,通过分析干涉图定量的求解相位。利用商用干涉仪可直接对SLM的调制相位进行定量测量,一般需要将SLM移入干涉仪的实验光路单独进行测量标定。对基于SLM的复杂实验系统而言,移动SLM可能会影响实验效率。同时,还可通过自建干涉光路测量SLM调制相位[16-17],这种方法光路相对复杂,在标定时需要移动SLM,难以实现SLM的原位标定。
本文从SLM的常用标定方法出发,详细介绍了可以实现SLM相位调制原位标定的自参考标定方法。自参考标定方法利用SLM面板的部分区域产生光栅相位,光栅的衍射级次可作为参考光,与携带调制相位的标定光形成干涉图。通过对干涉图作傅里叶频域分析[18]和数字全息重建[19],可分别定量地求解SLM的全局和局部相位调制。本文给出了对SLM进行全局标定后的相位调制响应,并进一步地对全局标定后的SLM的局部相位调制进行了测量。实验结果表明,自参考标定方法可以在简便的实验光路中实现对SLM相位调制的原位标定。
2 SLM常用标定方法
自参考的标定方法利用SLM的某一区域产生参考光,形成自参考的干涉光路,测量相位。以Holoeye公司的SLM为例,该公司提供常用的标定方案如图1所示。激光束经过扩束、准直、起偏后成为偏振的准直平面波,偏振方向由SLM的工作偏振方向决定。经过一个双孔掩膜后,平面波被分成两束,分别到达SLM的左右两个区域。SLM倾斜放置,将两束光沿斜向反射。经过一个透镜后,两束光汇聚相交,形成干涉条纹。
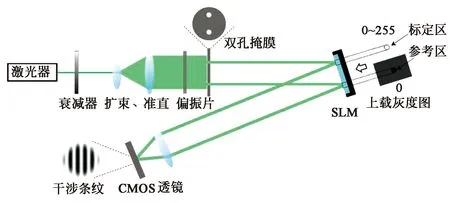
图1 一种SLM厂商提供的自参考的标定方法(Holoeye GAEA2)Fig.1 Configuration of the self-referenced calibration method(Holoeye GAEA2)
SLM的一半区域作为标定区域,均匀地上载0~255的灰度,因而标定区域产生从0不断增大的调制相位φg。SLM的另一半区域作为参考区域,均匀地保持上载0灰度,因而参考区域的调制相位为0。假设标定区域和参考区域的反射光强度均为I0,则形成的干涉条纹可表示为:
I=2I0(1+cosφg),
(1)
标定区域的调制相位不断增大,因而干涉条纹不断移动。通过干涉的基本原理,结合CMOS参数,即可通过干涉条纹的移动量,求解标定区域调制相位。
这种标定方法光路简便,但仍需单独搭建SLM的标定光路,且标定后需要重新移动、装调SLM。同时,这种方法标定的区域仅为SLM面板上的一小部分区域。测量标定小部分区域的查找表(Look-up-Table,LUT)被应用至整个SLM的所有区域上。因此,这种方法是一种全局的SLM相位调制标定方法,即假设SLM上每个像素的调制响应一致,测量其中一部分像素的LUT,以代表整个SLM的相位调制[20]。
3 SLM自参考标定方法
3.1 SLM生成光栅产生参考光
SLM的照明光源多为平行光,因此来自SLM不同区域的反射光也相互平行,无法自发地汇聚、干涉,因而传统方法为从外部引入参考光,或者如前文的方法由透镜折变、汇聚参考光和标定光形成干涉。SLM是可以调制相位的器件,因此可以利用SLM的部分区域,产生相位光栅,利用光栅以级次衍射的性质,生成倾斜的参考光。
图2所示为利用SLM生成光栅进行自参考标定的光路。如图2(b) 所示, 实现标定功能的光路为一个等效的衍射光路。为了在衍射光路中产生参考光,可上载如图2(d) 所示的灰度图。该灰度图分为两部分,一部分为标定区域,另一部分为光栅区域。在光栅区域,上载周期变化的相位,SLM上的对应区域也会产生光栅相位。因此,在如图2(c)所示的衍射光路中,由SLM光栅区域出射的光会以级次倾斜出射。在标定区域上载均匀相位,SLM的对应区域也产生大致均匀的平面相位。因此,由SLM标定区域出射的光会直接出射。经过一定距离后,倾斜出射的光作为参考光会与直接出射的标定光干涉,形成干涉图记录调制相位。
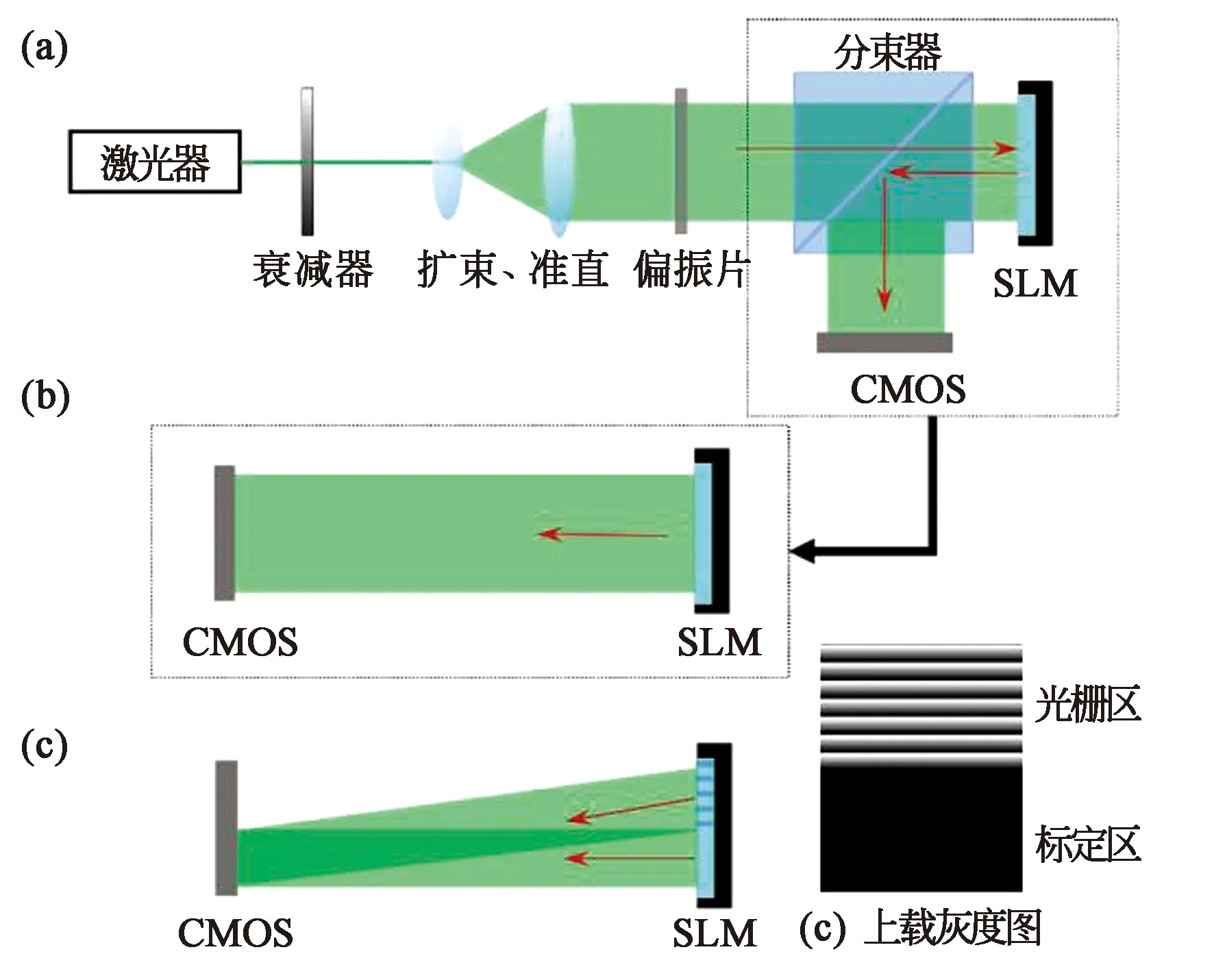
图2 利用SLM生成光栅的自参考标定光路。(a) 实验标定光路示意图; (b)SLM至CMOS的等效衍射光路;(c) SLM生成光栅后,SLM至CMOS的等效衍射光路; (d)上载的含光栅的标定灰度图。Fig.2 Configuration of the self-referenced calibration method using SLM generated grating. (a) Calibration setup; (b) Equivalent diffraction setup from the SLM to the imaging sensor; (c) Equivalent diffraction setup with uploaded grating; (d) Uploaded calibration pattern with grating.
利用图2所示的自参考标定光路,可以实现SLM的原位标定。对需要标定的SLM,在SLM前插入放置一个分束器,并在合适位置放置CMOS采集干涉图,即可完成标定数据的采集,进而完成标定。
未标定的SLM无法产生理想光栅,作为参考光的光栅衍射级次有着不均匀的强度和相位。在实验中,当参考光强度不均匀时,干涉条纹对比度可以满足计算相位的需求。分析干涉图得到的相位值代表参考光和标定光间的相位差值。设差值为φm,r,i,φm,r,i=φm+φr+φi。其中,φm为待求解调制相位,φr为不均匀参考光的相位分布,φi为实验光路中的其他相位误差。在标定过程中,光栅区域上载的灰度图样保持不变,φr保持不变。标定开始时,首先在标定区域上载0灰度值,则φm=0,此时计算干涉图得到的相位差值可表示为:φ0,r,i=0+φr+φi。标定开始后,在标定区域上载某一灰度值,对应的调制相位可作差求出:φm=φm,r,i-φ0,r,i。因此,即使实际光栅参数不够理想,依然可由自干涉法求出调制相位。
3.2 多参考光束的全局相位调制标定
在上述干涉标定方法中,参考光仅有一束,且与标定光不共路。产生的干涉图易受环境扰动,影响相位求解。为提高标定方法的稳定性,清华大学的高云辉等人提出了一种多参考光束的自参考全局相位标定方法[18]。基于多光束干涉及频域分析方法,可以有效提高相位求解的稳定性。
从SLM至CMOS的等效光路示意图如图3所示。通过改变上载的标定灰度图,实现多参考光。上载的灰度图可被分成上、中、下3部分。上下两侧为互相成一定倾角的光栅。经过光栅相位调制后,SLM光栅区的光以级次出射。这里使用的光栅相位为闪耀光栅相位,将两光栅相对放置,可使SLM的两出射光在空间某一位置重叠、共同作为参考光。SLM标定区的光携带调制相位信息直接出射,与两参考光形成三光束干涉。图3所示为有两参考光时形成的三光束干涉图,其强度分布I为:

(2)
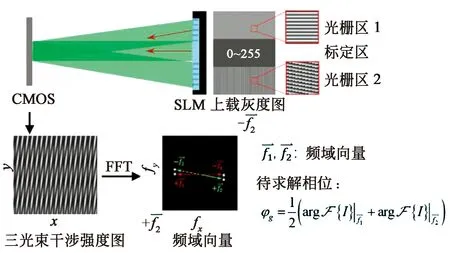
图3 多参考光束全局相位调制标定示意图Fig.3 Schematic of the multi-referenced method
其中,A1,A2分别为两参考光束的振幅,φ12为与测量无关的相位项。Ag为标定区域反射光的振幅,φg1和φg2为含有待测相位φg的相位项。待测量相位项可被表示为空间频率项的形式:
(3)

(4)
因此,待求解的相位项可表示为:
(5)
为从多光束干涉光强中求出某一灰度下的调制相位φg,可对干涉图进行傅里叶变换,根据空间频率求解相位。在有两束参考光时,干涉图的频谱中有两对频域向量,此时调制相位φg可由两对向量的平均值表示:
(6)
其中,arg代表取幅角,F{}代表傅里叶变换。
我们利用该方法测量标定了HOLOEYE公司生产的出厂状态下的GAEA-2型SLM,实验光路如图4(a)所示。标定区域的灰度由0~255以16的间隔均匀增加,并使用相机分别采集标定区域不同灰度下的17张干涉图。使用频域分析求解相位,实验光路如图4(a)所示。当处于未标定状态时,SLM处于非线性的过调制状态,无法直接使用。通过对测得的SLM调制曲线进行线性拟合,可以标定建立线性的LUT。标定后的LUT如图4(c),此时标定后的SLM可以进行线性的相位调制。
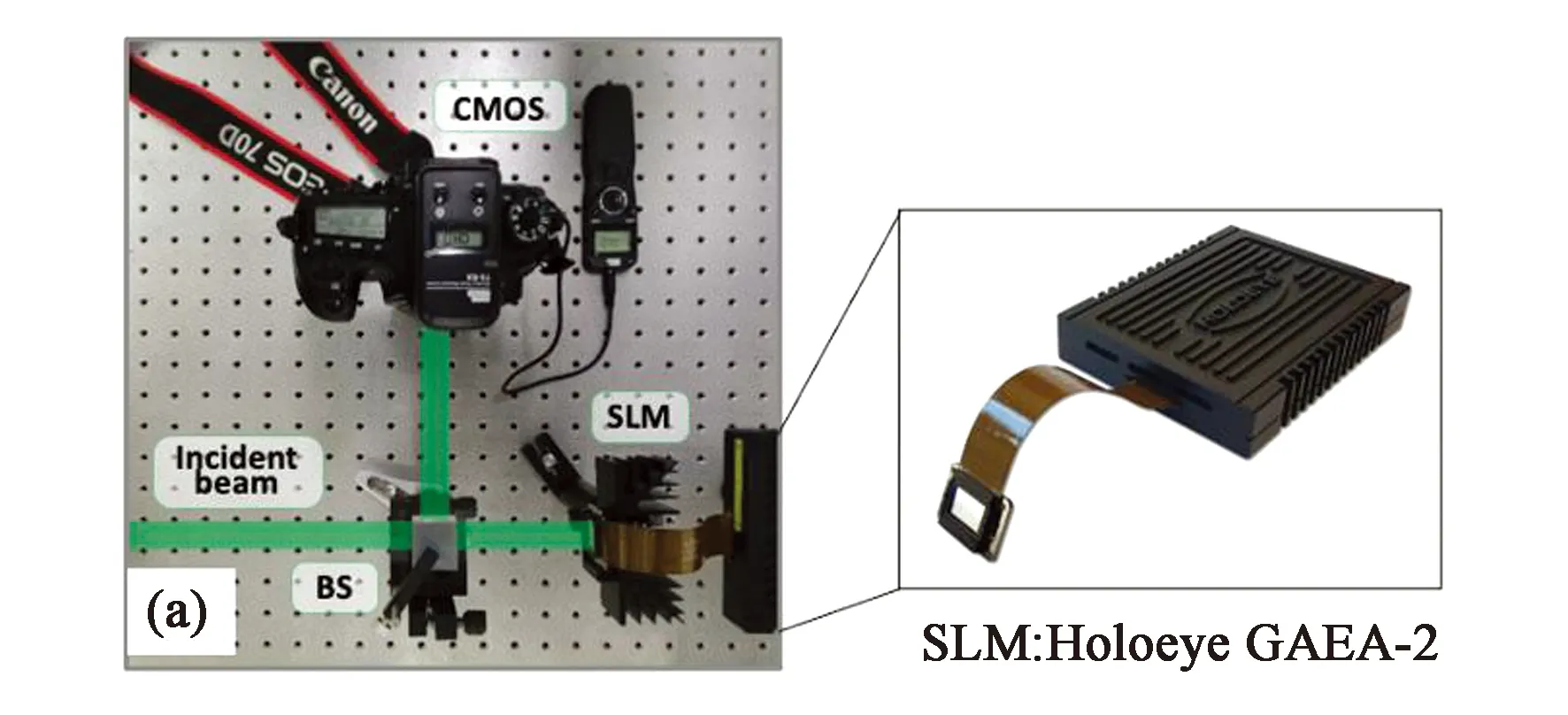
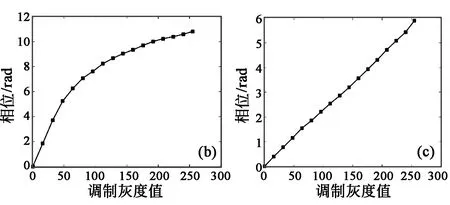
图4 (a)多参考光束标定实验光路; (b)未标定时的LUT; (c)标定后的LUT[18]。Fig.4 (a)Experimental calibration setup; (b)Measured LUT without calibration; (c) Cali-brated LUT[18].
利用多参考光束的方法,可以实现更稳定的相位标定。由于相位是根据干涉条纹的傅立叶变换进行求解的,利用一束参考光生成干涉图时,只有一对频域向量可用于求解相位。利用多参考光的方法,可以产生多对频域向量,利用多对频域向量可平均求解相位,提高标定系统的稳定性。在多参考光束的方法中,可以实现对SLM相位调制的全局标定,获得全局LUT。对干涉图做傅立叶变换后进行频域分析,求解得到的相位代表干涉图上的整体相位,即SLM标定区上的相位调制的平均值。相较于选取SLM部分代表整体调制的方法,这种方法求解得到的LUT更能反应SLM的整体调制响应。
3.3 基于数字全息的局部相位调制标定
前文介绍的自参考标定方法可以标定SLM的全局LUT,测量得到的全局LUT仅能代表SLM面板上所有像素的平均响应。由于SLM液晶层的厚度变化或一些其他的缺陷,SLM面板不同像素的相位调制可能是不同的[14,20]。因此,对调制精度要求更高的实验场景,需要标定SLM的局部LUT。为了使自参考的方法具有标定局部相位调制的能力,我们提出了基于数字全息技术的SLM局部相位调制标定方法[19]。
基于数字全息技术的等效标定光路如图5所示。上载的灰度图分为两个区域,分别为光栅区和标定区。光栅区为闪耀光栅灰度分布,用以使SLM的对应区域产生参考光。标定区上载从0~255的灰度值,使SLM产生不同灰度下的调制相位。标定区域的标定光与参考区域的参考光干涉,形成全息图I:
I=|Reiφr+Oeiφo|2=|R|2+|O|2+
ROei(φr-φo)+ROei(φo-φr),
(7)
其中,R和O分别为参考光和标定光的振幅,φr和φo分别为参考光和标定光的相位。为了重建标定光的相位,可使用参考光照射全息图。
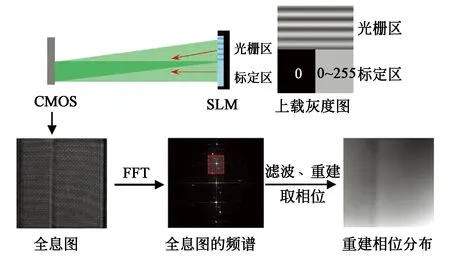
图5 基于数字全息的局部相位调制标定示意图[19]Fig.5 Schematic of thespatial uniformity calibration based on digital holography[19]
I×Reiφr=(|R|2+|O|2)Reiφr+
|R|2Oei(2φr-φo)+|R|2Oeiφo,
(8)
由于参考光与标定光呈一定角度,因此标定系统是一个离轴全息系统[21]。通过傅里叶频域滤波,可直接获得含有待求解相位的项,即|R|2Oeiφo。
将全息图进行滤波后,获得的待求解项表示标定光场在全息图平面的复振幅分布,而待求解的是SLM平面的相位分布。因此SLM平面的调制相位可通过菲涅尔衍射传播获得:
(9)
其中,k为由照明光波长λ决定的波数,x、y、xo、yo分别为全息图平面和SLM平面的坐标,z为两平面之间的距离。当闪耀光栅周期为P、SLM的边长为L时,两平面之间的距离为:
(10)
数字全息技术可以重建相位分布,重建的分辨率由系统的几何尺寸决定。根据衍射距离z,结合系统几何参数,可求解标定系统的相位成像数值孔径NA。当CMOS采样间隔为Pcamera时,NA为:
(11)
其中,M为CMOS平面全息图的有效像素数。由于对全息图的采集还需要满足采样定理,因此,重建局部相位调制的空间分辨率δ由数值孔径和CMOS的像素尺寸共同决定[22]:
(12)
利用数字全息技术可以重建SLM的调制相位分布。改变上载至SLM的灰度,可以重建出不同灰度下的调制相位分布。由于使用数字全息的方法对每个灰度下的调制相位具有空间分辨的能力,可根据需要对SLM上的某个点或区域进行测量,标定SLM的局部相位调制。由于本方法也采用了自参考光路,因而也可对SLM进行原位标定。
我们利用该方法测量标定了HOLOEYE公司生产的GAEA-2型SLM,分辨率为3 840×2 160,像素尺寸3.8 μm。标定时,向SLM上载图5中的灰度图,实验光路如图6(a)。标定区域的灰度由0~255以16的间隔均匀增加,并使用相机分别采集标定区域不同灰度下的17张全息图。利用数字全息的方法,可以直接衍射重建出SLM在不同调制灰度下的调制相位分布。当标定区域调制灰度为16和240时,求解出的相位分布如图6(c)、(d)所示。通过在标定区域内选取测量点,可标定出测量点处SLM的局部相位调制。在实验中测得的A、B、C三个测量点的局部LUT如图6(b)所示,当调制灰度为144时,3个测量点处的调制相位最大差值为0.73 rad。通过分别对3个测量点处的LUT进行线性拟合,可对局部LUT进行标定。
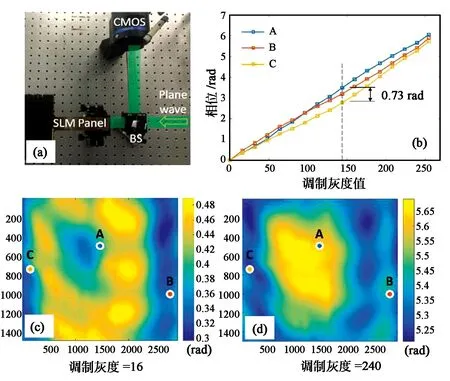
图6 (a)基于数字全息方法的标定实验光路; (b)A、B、C三个观测点的局部LUT; (c)调制灰度为16时,标定区域的调制相位分布;(d)调制灰度为240时,标定区域的调制相位分布[19]。Fig.6 (a)Experimental calibration setup based on digital holography; (b)Measured LUT on the A, B and C points; (c) Phase profile with modulated grayscale of 16; (d) Phase profile with modulated grayscale of 240[19].
4 结 论
本文介绍了SLM调制的基本原理和厂商提供的一种标定方法,总结了基于自参考光路的SLM相位调制标定方法。自参考方法的光路简便,光学元件易得。在SLM的工作光路中,插入一个分束器引出调制光后即可记录干涉图、求解相位,可以实现SLM的原位标定。自参考标定方法的核心是上载灰度图样设计和干涉图的分析方法,通过傅立叶频谱分析技术和数字全息技术,可分别求解SLM的全局LUT和局部LUT。通过借鉴其他干涉测量方法,如四步相移法,可利用自参考的标定光路实现更有效的标定。
猜你喜欢
军事文摘(2022年8期)2022-05-25
少儿美术(2019年11期)2019-12-14
理科考试研究·初中(2017年5期)2018-03-07
中学生数理化·八年级物理人教版(2017年10期)2018-01-22
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
高师理科学刊(2016年8期)2016-06-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
中国记者(2014年9期)2014-03-01
物理与工程(2014年4期)2014-02-27
中国高新技术企业·综合版(2013年1期)2013-02-04
