
智能车辆路径跟踪控制应用研究
2021-07-14 07:30姜立标
机械设计与制造工程 2021年6期
姜立标,洪 顺
(华南理工大学机械与汽车工程学院,广东 广州 510640)
随着计算机技术的快速发展和对驾驶安全要求的提高[1],智能车辆控制的研究获得了广泛的关注,其中路径跟踪控制是智能车辆控制的重要组成部分,路径跟踪控制的好坏直接关系到智能车辆控制的效果[2]。路径跟踪控制常采用几何方法进行,如预瞄法、纯跟踪算法等,但是由于车辆尺寸较大、运动情况复杂,受最小转弯半径等动力学条件的约束,传统的几何方法很难解决多约束问题[3-5]。现有的针对智能车辆行驶安全和行驶稳定性以及车辆路径跟踪精度的研究难以达到要求[6-8],因此对路径跟踪精度和车辆行驶稳定性的研究具有十分重要的意义。本文建立了车辆简化模型,搭建了智能车辆三自由度动力学模型,构建了基于线性时变模型的智能车辆路径跟踪控制器,在MATLAB/Simulink与Carsim联合仿真平台上对车辆的各种运行工况进行仿真,分析不同工况下的路径跟踪效果,验证了该路径跟踪控制器的有效性。
1 车辆动力学模型
车辆模型的复杂度越高,计算时间越长,对计算机内存的消耗越大。为满足车辆目标路径跟踪的精度和实时性要求,在比较准确地描述车辆动力学特性的基础上尽可能对模型进行简化,故作出以下假设:不考虑车辆z轴方向的运动,且行驶路面平坦;不考虑悬架系统的影响;忽略车辆行驶过程中的载荷转移及自身转向系统的影响;仅考虑纯侧偏轮胎特性,同时不考虑轮胎非线性区。
在上述较为理想的假设基础上,本文搭建了具有三自由度的车辆模型,如图1所示,其三自由度分别为横向、纵向和横摆运动。图中,oxy为车辆坐标系,OXY为惯性坐标系。
建立的车辆动力学模型为:
(1)

轮胎侧偏角、转向角和滑移率在较小区间内,轮胎力可以用如下线性模型描述:
(2)
式中:Cl*,Cc*分别为轮胎纵向刚度和轮胎侧偏刚度,其中*代表f或r,分别表示前轮或后轮;S*为轮胎滑移率;α*为轮胎侧偏角。
在计算轮胎力的过程中,基于车辆小角度假设,角度满足如下近似关系:
tanσ≈σ,cosσ≈1,sinσ≈σ
(3)
式中:σ为等效转换示意角。
简化轮胎侧偏角计算公式为:
(4)
如式(5)所示,可将车辆坐标系与惯性坐标系对应转换,以达到方便描述车辆运动状态的目的。
(5)

基于小角度假设和线性轮胎模型,可得到简化的车辆动力学非线性模型:
(6)
2 模型预测控制器
2.1 离散化模型及模型预测方程
考虑智能车辆在行驶过程中控制器实时性要求高,非线性模型难以满足实时性要求,对非线性模型进行线性化,线性时变状态方程[9]为:
(7)

(8)
式中:Ak=I+TA(t),Bk=TB(t),其中I为单位矩阵,T为采样周期。
由式(8)可得增量离散状态空间方程:
(9)
设定状态量γ(k|t)为:
γ(k|t)=[ζ(k|t)u(k-1|t)]T
(10)
更新后的状态方程为:

(11)

定义k时刻未来输出Y(k+1|k):
Y(k+1|k)=[η(k+1|k),η(k+2|k),…,η(k+Np|k)]T
(12)
式中:Np为预测时域。
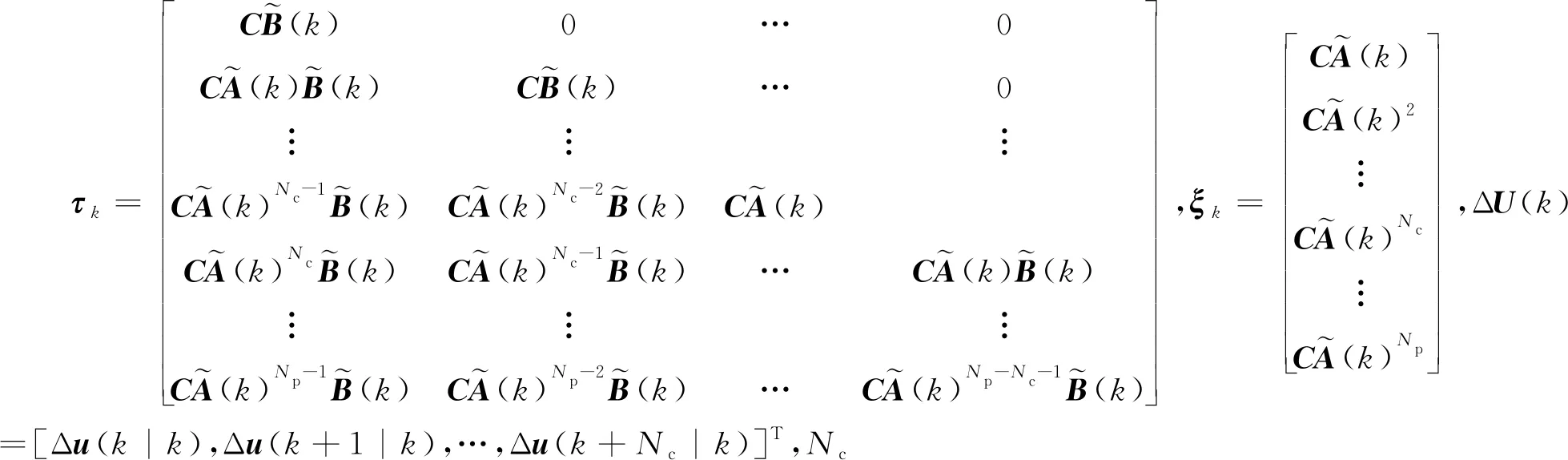
可得系统未来的预测方程为:
Y(k+1|k)=ξkγ(k)+τkΔU(k)
(13)
式中:
2.2 构建约束条件
为了保证智能车辆精准且较为稳定地跟踪目标路径,除系统控制量约束与控制量增量约束外,需对车辆动力学进行约束,引入车辆质心侧偏角约束与附着条件约束;为保证智能车辆行驶过程中轮胎力始终处于线性区间内,需对轮胎的侧偏角进行约束。
1)质心侧偏角约束。
路面附着系数影响质心侧偏角的范围,质心侧偏角对车辆的行驶稳定性有较大影响,因此需根据不同路面附着系数选定不同的质心侧偏角,本文将质心侧偏角β的约束条件设置为:良好附着路面,-11°≤β≤11°;湿滑路面,-1.5°≤β≤1.5°。
2)附着条件约束。
车辆轮胎与地面附着系数μ影响着汽车的动力性,需设定车辆附着条件约束。车辆加速度受到地面附着力的影响,横向加速度ay与地面附着系数μ存在如下关系:
|ay|≤μg
(14)
式中:g为重力加速度。
当车辆行驶路面有良好的附着条件时,该项约束条件范围较大,过大的车辆横向加速度会严重影响人的乘车体验感,但是过小的约束条件可能会导致求解过程中出现无解的现象,因此本文引入软约束条件:
ay,min-ε≤ay≤ay,max+ε
(15)
式中:ay,min,ay,max分别为车辆横向加速度最小值和最大值;ε为松弛因子。
3)轮胎侧偏角约束。
当车辆在水平道路直线行驶、没有发生侧滑时,轮胎侧偏角α=0;当轮胎受到横向力发生弹性形变而未发生侧滑时,α≤αmax(极限侧偏角),当车辆发生侧滑时,α>αmax。因此,车辆轮胎的侧偏角直接反映了车辆是否发生侧滑,限制轮胎侧偏角就限制了侧滑的发生。动力学模型基于小角度假设,轮胎侧偏力与侧偏角存在线性关系,轮胎侧偏角约束可设置为:-2.2°≤α≤2.2°。
2.3 目标函数
本文模型预测控制器采用动力学模型,相对于运动学模型具有较高的复杂度,同时也设定了较多的约束条件,需要在最优目标函数中引入松弛因子,防止系统出现无可行解。目标函数J(ζ(t),u(t-1),ΔU(t))的表达式为[10]:
(16)
式中:Δη(t+i|t)=η(t+i|t)-ηr(t+i|t),为实际输出路径η(t+i|t)与参考路径ηr(t+i|t)之差;Δu(t+i|t)为控制增量;R,Q为权重矩阵;ρ为权值系数。
基于上述目标函数和约束条件,模型预测控制器的优化问题可转换为二次规划问题,由于优化问题的约束条件都是不等式约束形式,因此采用二次规划问题求解方式可得到优化问题的有效可行解,二次规划问题可描述为:
(17)
式中:ΔUt,ΔUmin,ΔUmax分别为控制增量序列与控制增量序列极值;Ut,Umin,Umax分别为控制量序列与控制量序列极值;yh,yh,min,yh,max分别为硬约束与硬约束极值;ys,ys,min,ys,max分别为软约束与软约束极值。

3 仿真验证
3.1 车辆参数
基于Carsim与MATLAB/Simulink构建联合仿真平台,车辆动力学模块由Carsim提供,通过m语言编写系统控制器,在Simulink中进行整个联合仿真架构的搭建,对模型预测控制器进行验证。车辆模型主要参数见表1。
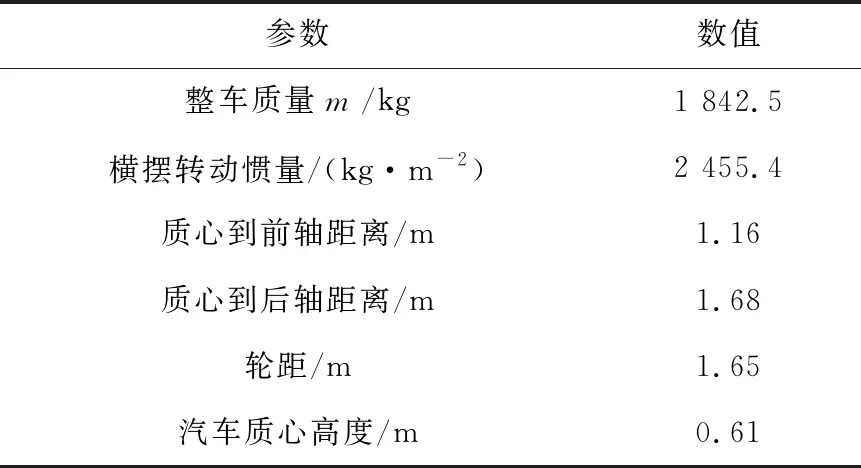
表1 车辆模型主要参数
3.2 仿真分析
基于Carsim和MATLAB/Simulink联合仿真平台,分别在不同车速下对直线路径和双移线路径进行控制器仿真,验证该控制器对目标路径的跟踪效果。初步设定控制器参数为:周期参数T=0.05 s,松弛因子ε=10,预测时域Np=10,控制时域Nc=4。初始位置设为x0=0,y0=0,φ0=0。
对直线路径进行跟踪分析,结果如图2所示。
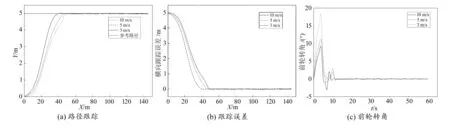
图2 直线路径跟踪仿真
由图2(a)可知,车速分别为3,5,10 m/s时对直线路径跟踪控制快速趋向于目标路径,且在行驶距离达40 m后车辆的行驶路径收敛于目标路径,车辆整体行驶路径较为平稳;由图2(b)可知,车辆起始路径跟踪控制误差为5 m,由于车辆起始位置处于原点,初始误差在正常范围内,随着车辆的行驶,跟踪误差快速收敛于0;由图2(c)可知,车辆前轮转角响应快速,未出现较大抖动。仿真结果表明,该路径跟踪控制器对直线路径有较好的跟踪效果和稳定性。
双移线路径跟踪结果如图3所示。
由图3(a)可知,带软约束的路径跟踪控制可快速趋向双移线路径,未出现较大的波动,无软约束的路径跟踪控制器响应速度较慢,且最终路径未收敛于目标路径;由图3(b)可知,带软约束控制器最大跟踪误差为0.3 m,未出现较大波动且最终收敛于0,无软约束控制器最大跟踪误差达到1.0 m,且出现较大的波动情况;由图3(c)可知,车辆前轮转角变化幅度小,未出现较大波动,带软约束控制器可收敛于0。双移线路径跟踪仿真结果表明,该路径跟踪控制器对双移线路径有较好的跟踪效果,且车辆行驶稳定。
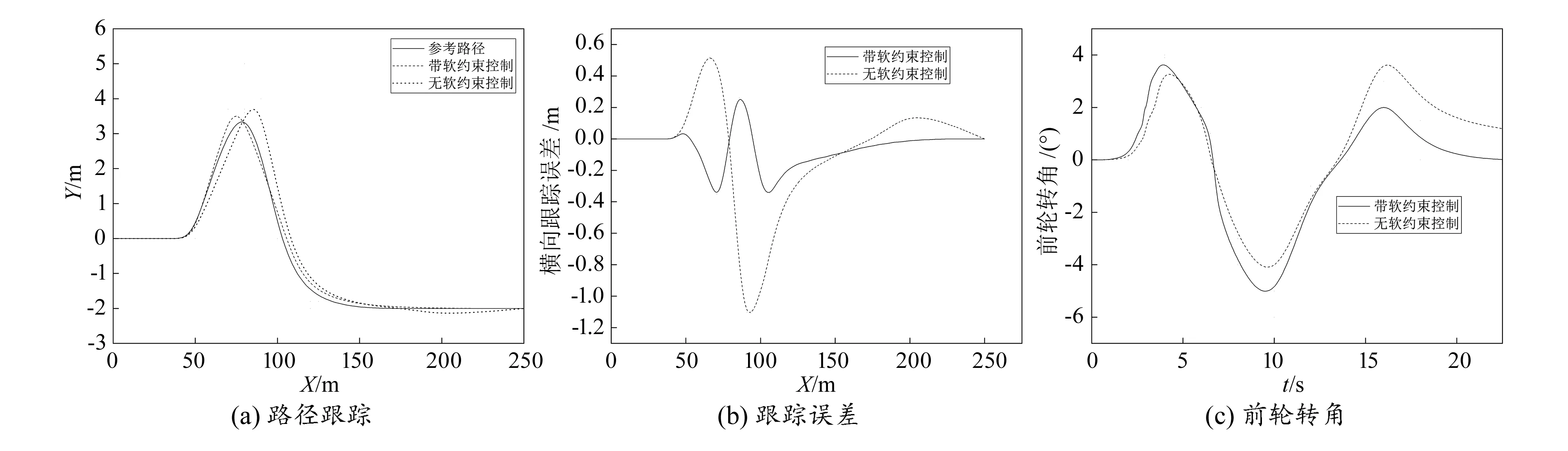
图3 双移线路径跟踪仿真
4 结束语
本文针对智能车辆难以同时兼顾路径跟踪控制精度和稳定性的问题,构建了基于线性时变模型的智能车辆路径跟踪控制器。基于Carsim和MATLAB/Simulink联合仿真平台,分别对直线路径和双移线路径跟踪进行了仿真实验,结果表明,在低速工况下,该路径跟踪控制器对参考路径有较高的跟踪精度和稳定性。智能车辆路径跟踪控制器的研究,对未来实现完全自动驾驶具有重要的意义。后续将重点研究智能车辆路径跟踪控制器在高速工况和突变工况下的路径跟踪。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
童话世界(2019年14期)2019-06-25
Frontiers of Nursing(2018年1期)2018-05-21
幼儿教育·父母孩子版(2017年12期)2018-02-28
物理教学探讨(2018年1期)2018-02-13
橡胶工业(2015年4期)2015-07-29
橡胶工业(2015年4期)2015-07-29
铁道建筑(2010年11期)2010-07-30
