基于ZigBee通信的辅助驾驶系统设计
2021-07-09 03:07王小龙孙付春曹文继
成都大学学报(自然科学版) 2021年2期
王小龙,孙付春,曹文继
(成都大学 机械工程学院,四川 成都 610106)
0 引 言
汽车辅助驾驶系统的设计与实现旨在解决汽车的交通安全问题,并提高道路的通行效率.通常,汽车辅助驾驶系统的环境感知模块常用到视觉、雷达、激光和惯性导航等传感器,并通过融合技术对数据进行处理.实际应用发现,上述单一传感器或不同类型传感器的融合计算存在系统误差,且受环境影响,导致系统误警率和漏警率较高,不能够及时准确提供预警信息[1].研究表明,将无线传感网络技术应用于汽车辅助驾驶系统中,可有效提升车辆行驶过程中信息交互能力[2].ZigBee通信作为一种新型无线传感网络技术,具有成本低、功率小与工作可靠等特点逐渐在汽车智能交通领域应用发展起来[3].
汽车辅助驾驶系统对数据的传输效率和可靠性要求较高,利用ZigBee通信的星型拓扑结构能够更加有效建立车际间的通信,数据传输可以实现多点对多点,不再以中继点作为数据交互的管理单元,从而显著提升车际之间的数据交互范围及效率.基于此,本研究基于ZigBee通信设计了一种汽车辅助驾驶系统,本系统利用ZigBee通信的星型拓扑结构,快速搭建车际联系,以实现车与车之间的行车数据交互,可实时对汽车周围的场景进行采集分析并及时做出相应的预警提示.
1 系统设计
1.1 系统整体设计
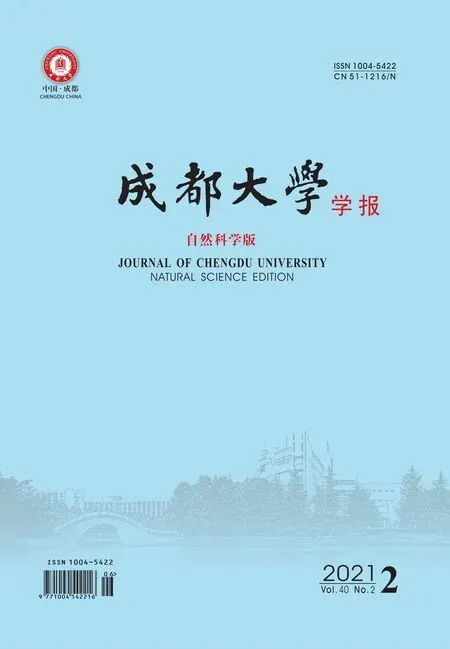
本研究的汽车辅助驾驶系统的设计主要基于以下技术要求进行,即实现车际通信(vehicle to vehicle,V2V)、数据交互、状态分析、及时预警及远程监控等主要功能.系统的原理架构设计如图1所示.
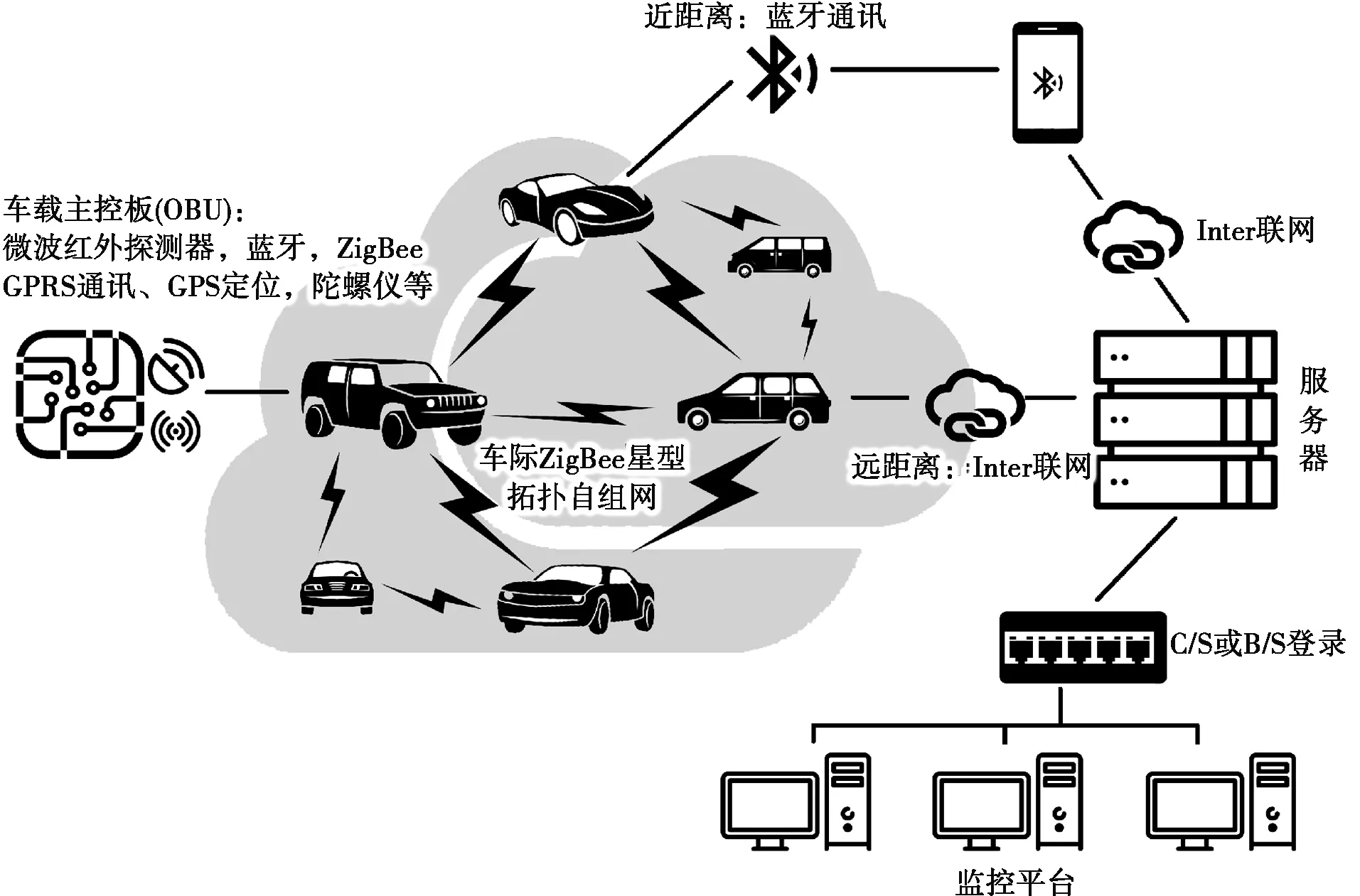
图1 汽车辅助驾驶系统设计方案
本汽车辅助驾驶系统依据功能和状态的不同进行了相应的模块设计,主要包括车载信息采集系统、自车状态采集系统、无线通信系统、远程数据总控系统及移动监控系统等.其中:车载信息采集系统主要进行车辆定位与车内环境参数的采集;自车状态采集系统主要对车辆行驶状态中的速度、加速度、航向角以及行车所处环境状态等进行采集;无线通信系统进行车际组网,实现行车数据交互;远程数据总控系统完成多车信息的接收、分析和监控;移动监控系统实现移动设备与系统进行人机交互,获取系统信息以及对预警信息的移动端提示.
1.2 车载控制系统设计
作为辅助驾驶系统的基础交互控制单元,车载控制系统需要将车载信息采集系统、自车状态采集系统与无线通信系统集成一体,同时还需要实现对远程数据总控系统与移动监控系统数据的发送和接收[4].因此,该部分是辅助驾驶系统在软硬件设计方面的关键点,其模块设计如图2所示.
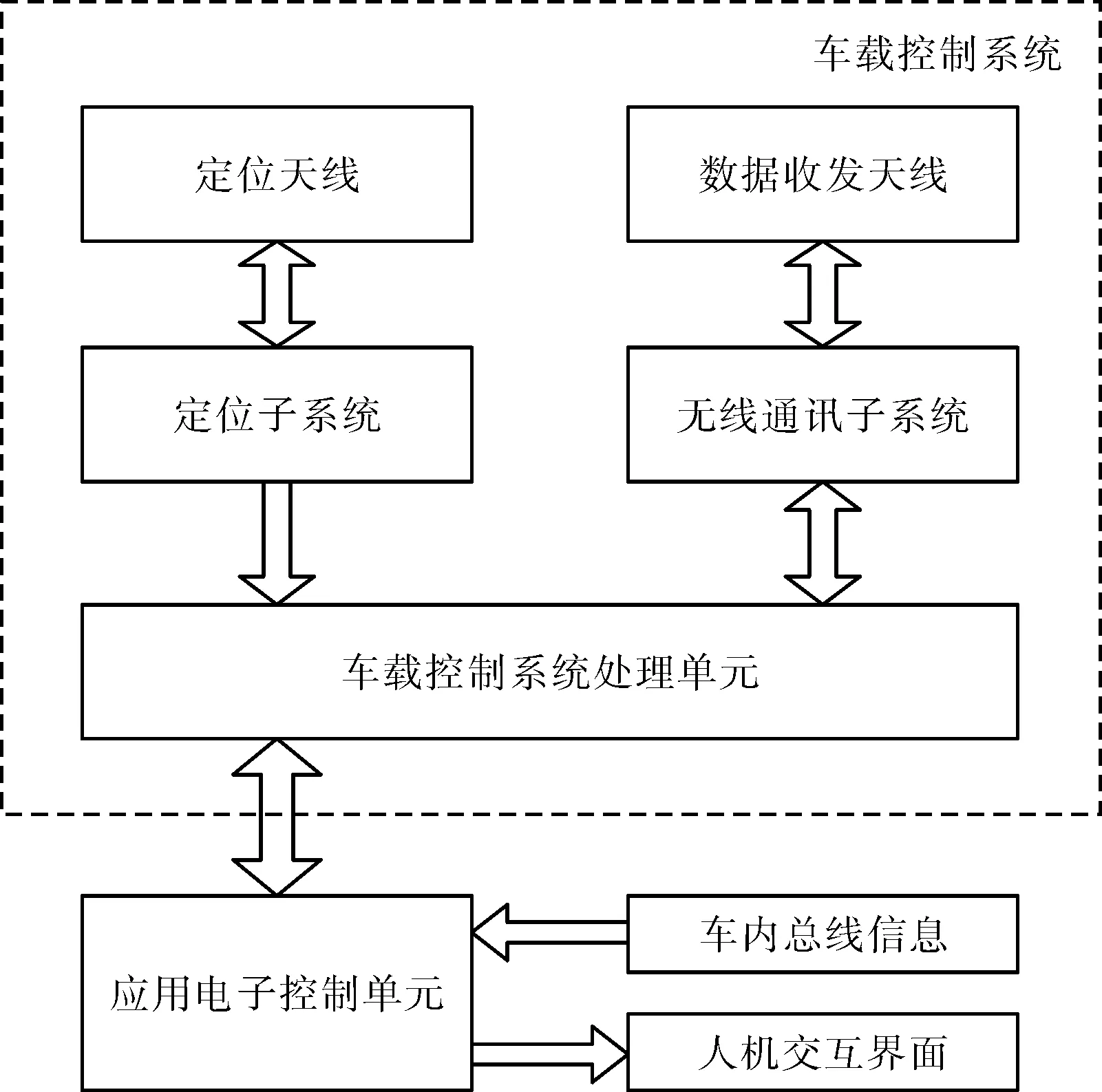
图2 车载控制系统示意图
车载控制系统各个硬件单元分为:无线通信子系统、定位子系统、车载设备处理单元及数据收发天线等部分.无线通信子系统主要负责接收和发送信号,一个车载设备里可以装配一个或者多个无线电通信子系统;定位子系统可以通过车速信号、惯性测量单元与差分定位系统等方式来实现增强定位技术,该子系统中集成了全球导航卫星系统(global navigation satellite system,GNSS)接收器,以实现对车辆的位置、方向、速度和时间等信息的采集;车载设备处理单元是车载控制系统的主要控制单元,负责生成需要发送的自车信号,并且对接收的来车信号进行处理分析;数据收发天线则负责各类控制信号的接收与发送.
车载控制系统可通过接口与应用电子控制单元进行数据交互,并通过人机交互界面(driver-vehicle interface,DVI)来实现包括图像、声音及振动等方式对驾驶员的辅助驾驶提醒.在某些实际场合,应用电子控制单元和车载设备处理单元可在一个物理设备中实现.
1.2.1 车载控制系统算法设计
车载控制系统的控制算法设计主要通过ZigBee通信交互获取自车与交互车之间的距离、速度等行车数据,并各自计算与交互车的安全距离是否足够,以及在当前状态下的安全制动距离及制动时间.如果存在行驶方向交叉,且制动安全距离不足时,将触发报警机制.另外,车载控制系统各自车状态传感器也将检测自车状态,当某个传感器监测到数据异常时也将触发自车报警机制.
ZigBee通信数据中,每帧数据将打包自车当前行车数据,发送至交互车辆,交互车辆接收数据后将进一步分析来车数据,并判断是否触发预警,再打包自车数据反馈发送.在一次数据交互过程中,会出现5个距离变化,具体如表1所示.
表1 通信过程中的距离变化
由表1可以分析出车辆行驶距离的变化,
∑Si=Sn-1-Sn
(1)
式中,Sn-1为上一阶段两车相距距离;Sn为本阶段各车相距距离;Si为本阶段各车行驶距离.
由于各个阶段车辆行驶距离主要取决于各个阶段数据传递或数据处理所占据的时间,而ZigBee通信使用无线电波,其在数据交互距离内,可以近似忽略两车数据传输的时间.而数据处理周期由控制程序设计为20 ms/次,以两车均保持120 km/h速度进行计算,每周期内两车总共可行驶0.67 m,可见单周期数据处理时两车距离变化对安全预警制动距离的影响十分微小.因此,本控制算法的关键在于分别采集两车之间的定位信息,通过转换确定两车距离及行驶速度,进行安全距离计算,同时检测自车安全状态,当交互车与自车的行驶存在路线交叉且安全距离过小时,将触发预警机制.
此外,车载控制系统是本汽车辅助驾驶系统的主要执行单元,其控制逻辑关系到系统的整体效率.车载控制系统的主要控制逻辑流程如图3所示.车载控制系统的工作处于循环状态,以保证数据的顺序性和结构性.

(a)
1.2.2 车载控制系统硬件设计
本研究的车载控制系统的硬件设计结构方案如图4所示.
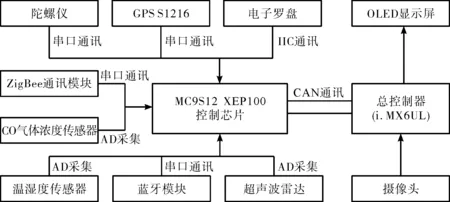
图4 车载控制系统硬件设计结构图
车载控制系统硬件设计结构方案中,中央处理芯片采用飞思卡尔公司的MC9S12XS128型芯片,其采集各传感器等底层设备测量信号,并通过串口通信方式传递给嵌入式控制器.嵌入式控制器通过应用软件读取数据,并在人机交互界面上实时显示相关数据和预警提示.车载控制系统中,ZigBee通信模块、陀螺仪、蓝牙模块、GPS均采用串口通信与控制芯片进行通信.ZigBee通信模块负责建立车与车之间的通信,将自车的数据发送给周围车辆,同时接收周围车辆的数据;GPS负责获取位置信息,结合电子罗盘明确自车的行驶方向,其中电子罗盘和车载控制系统控制芯片采用IIC方式进行通信;陀螺仪负责将车辆的姿态信息进行采集解算,预防自车发生严重侧倾或侧滑,并实时采集自车各向加速度信息;蓝牙模块负责将自车行驶数据发送到手机终端APP进行接收处理、分析显示以及预警提示,方便用户通过手机实时查看自车运行状况和周围行驶车辆的状况;温湿度传感器负责采集车内的温湿度,CO传感器负责采集车内的空气质量,保障驾驶人员和乘客拥有一个舒适的驾乘环境;超声波传感器采集自车与前车的距离,通过控制芯片计算短距离下安全车距界限并做出预警[5].控制芯片将各传感器采集到的数据进行处理综合并通过ZigBee通信与周围车辆进行数据交互,总控制器则负责进行数据可视化显示,并根据状态安全与否发出声光预警.同时,总控制器还可以加装摄像头,实现对行驶盲区的显示.车载控制系统的硬件设计原理如图5所示.

图5 车载控制系统硬件设计原理图
2 系统交互与测试
针对本汽车辅助驾驶系统的功能为有效对行车数据及车辆交互数据进行监测和预警,本研究对系统的交互软件进行了具体设计,包括主交互软件和手机监视软件.主交互软件通过串口通信与车载控制系统进行数据通信,同时能够将自车与来车状态进行数据可视化显示,对可能出现的紧急状态进行图像文字及声音预紧提示.手机监视软件主要通过蓝牙通信与车载控制系统交互数据,能够通过手机的振动或语音提醒驾乘人员提前进行预警操作,确保驾驶安全,其软件交互界面如图6所示.
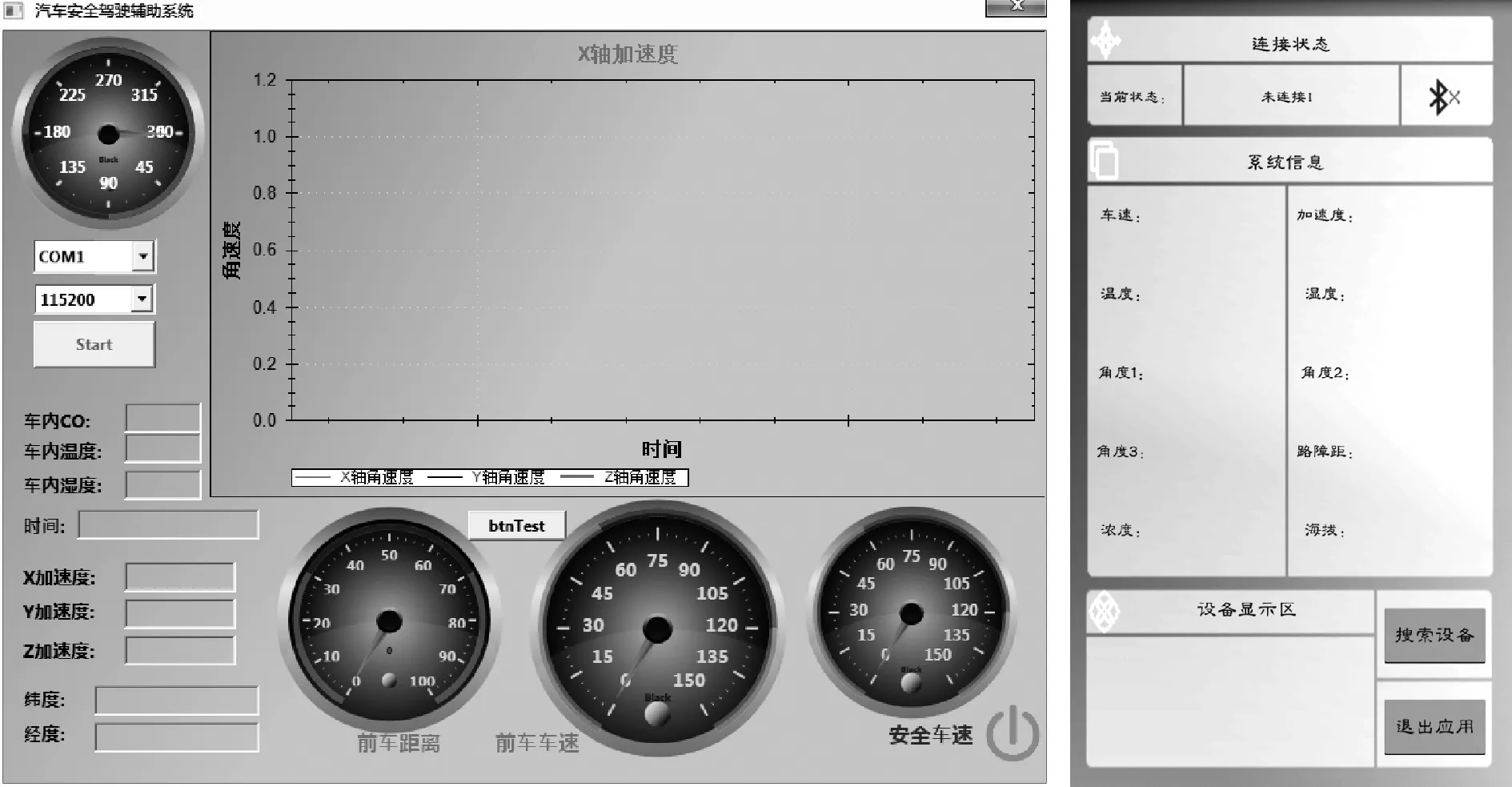
图6 主交互程序及手机蓝牙监视软件界面
为验证本研究设计的辅助驾驶系统是否能够满足具体的辅助驾驶性能要求,特进行了实车测试试验.试验分为,同向超车、相对离去、相向制动、路口交汇4种类型[6-7].
(1)同向超车测试.甲、乙两车同向运行,甲车初始落后乙车376 m,甲、乙两车同时向前行进,甲车由于速度高于乙车,在14.4 s左右追平乙车并继续向前行驶,最终通过加速超越乙车265.4 m后两车停止运动,在25.8 s试验时间内,甲车从落后376 m到超越265.4 m,结果如图7所示.试验表明,系统能够有效传输两行车数据,实现状态提示.
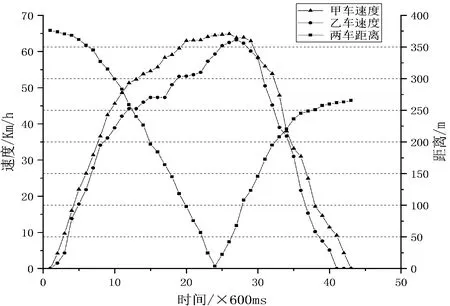
图7 同向超车试验
(2)相对离去测试.甲、乙两车背对处于同一位置(初始两车相距2.5 m),测试开始后分别朝相对方向直线驾驶,甲车整个过程中迅速驾驶至57.8 km/h峰值速度后减速停车,停止一段时间后又进行两次短暂起停动作,而乙车则加速至42.1 km/h峰值速度后缓慢减速行进,在48.6 s时两车停止运动,此时两者相距490.3 m,结果如图8所示.试验表明,在近500 m的离去距离范围内,系统能够保证良好的通信效率.

图8 相对离去试验
(3)相向制动测试.甲、乙两车从相距277.4 m处开始相向行驶,两车分别加速至50 km/h后迅速进行制动,其中甲车加速至9.6 s时达到峰值速度60.5 km/h后迅速进行制动,而乙车则在9 s时达到峰值速度56.2 km/h后迅速制动.在13.2 s时两车均停止移动,此时两车相距43.4 m,结果如图9所示.试验表明,系统能够保证在行车出现紧急状况时为车辆提供必要的紧急制动预警,且能够保障行车之间的安全制动时间及距离.

图9 相向制动试验
(4)路口交汇测试.甲、乙两车分别沿交叉路线行驶,初始两车直线距离120.9 m,两车提速至40 km/h左右交叉通行,在10.8 s时两车相距最近为46.2 m,此后两车分别向前减速行驶,距离逐步增加,最终两车停止时相距61.9 m,结果如图10所示.试验表明,系统在十字路口等路况下能够保持良好的通信能力.
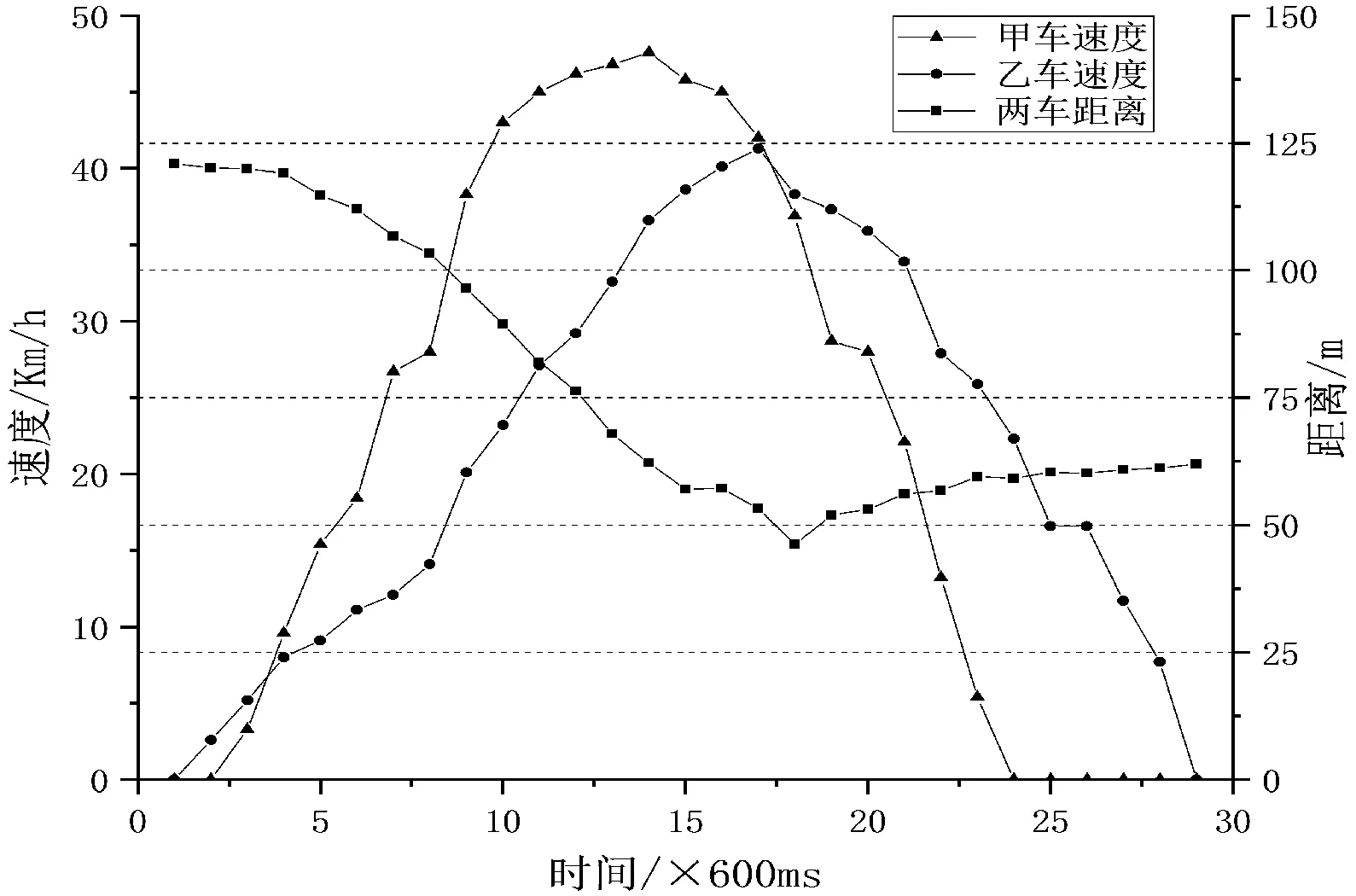
图10 路口交汇试验
通过上述试验测试,并对试验数据进行详细分析可知,各项测试中,甲、乙两车最高速度都达到50 km/h左右,两车在4种模拟路况类型中均能保障良好的通信能力,并对车际之间的行车数据进行精确传输.试验验证了基于ZigBee通信的辅助驾驶系统的数据收发性能,完全能够保证在一定距离范围内车际之间良好的通信效率.
3 结 语
本研究提出了一种基于ZigBee通信的汽车辅助驾驶系统,并对系统的整体框架和具体的车载控制单元进行了软硬件设计.本系统的功能包括:开启手机辅助驾驶系统App,蓝牙与辅助驾驶系统连接后,实现实时监控车辆的室内温度、二氧化碳浓度等环境信息;利用ZigBee通信组网,在信号可达距离内实现了车辆之间的信息传递和共享.通过实车试验验证,本系统在一定距离范围内能够有效保证车与车之间的实时数据交互,保证车辆之间的主动预警,能够为车辆的辅助驾驶及主动安全性能提升起到一定的作用.
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
河北理科教学研究(2021年3期)2022-01-18
发明与创新(2021年39期)2021-11-05
铁道通信信号(2020年8期)2020-02-06
中国交通信息化(2019年10期)2019-11-16
今日农业(2019年12期)2019-08-13
汽车维修与保养(2019年3期)2019-06-19
现代园艺(2017年22期)2018-01-19
中国公共安全(2017年11期)2017-02-06
火控雷达技术(2016年3期)2016-02-06