
基于LMD与改进SVM的轴承故障诊断方法*
2021-07-07 00:34:24李道军李廷锋刘德平
机械制造 2021年6期
□ 李道军 □ 李廷锋 □ 刘德平
1.郑州职业技术学院 郑州 450121 2.郑州大学 机械与动力工程学院 郑州 450001
1 研究背景
在现代旋转机械工业中,滚动轴承的应用非常广。滚动轴承是否正常运行,对设备的加工精度、寿命和可靠性有很大影响。因此,对滚动轴承进行故障诊断具有重要的实际意义。当滚动轴承某部位有瑕疵时,将会产生周期性脉冲力[1]。根据滚动轴承的结构,某一部分受损会产生不同周期的脉冲力。由此,对振动信号的冲击和周期进行分析,是滚动轴承故障诊断的一种有效途径。
局部均值分解是由Jonathan Smith提出的一种信号自适应时频分析方法[2],对于处理具有不规则、不稳定性特征的振动信号非常合适。很多学者已经将局部均值分解应用于设备的故障诊断,并验证了方法的有效性[3-6]。笔者结合局部均值分解与改进支持向量机,对信号的能量特征进行分析,提取乘积函数分量的能量百分比值作为轴承故障识别的特征向量,同时应用细菌觅食优化算法对支持向量机参数进行优化,得到最优参数组合,以提高支持向量机模型诊断的正确率,并利用训练好的支持向量机模型对轴承进行状态诊断。
2 局部均值分解提取特征向量
局部均值分解将复杂的振动信号分解为一系列从高频到低频的由一个包络信号和一个纯调频信号组成的乘积函数分量。对于任意原始信号X(t),局部均值分解可分解为j个乘积函数分量与一个残余分量u(t)之和,即:
(1)
式中:Fi(t)为第i个乘积函数分量。
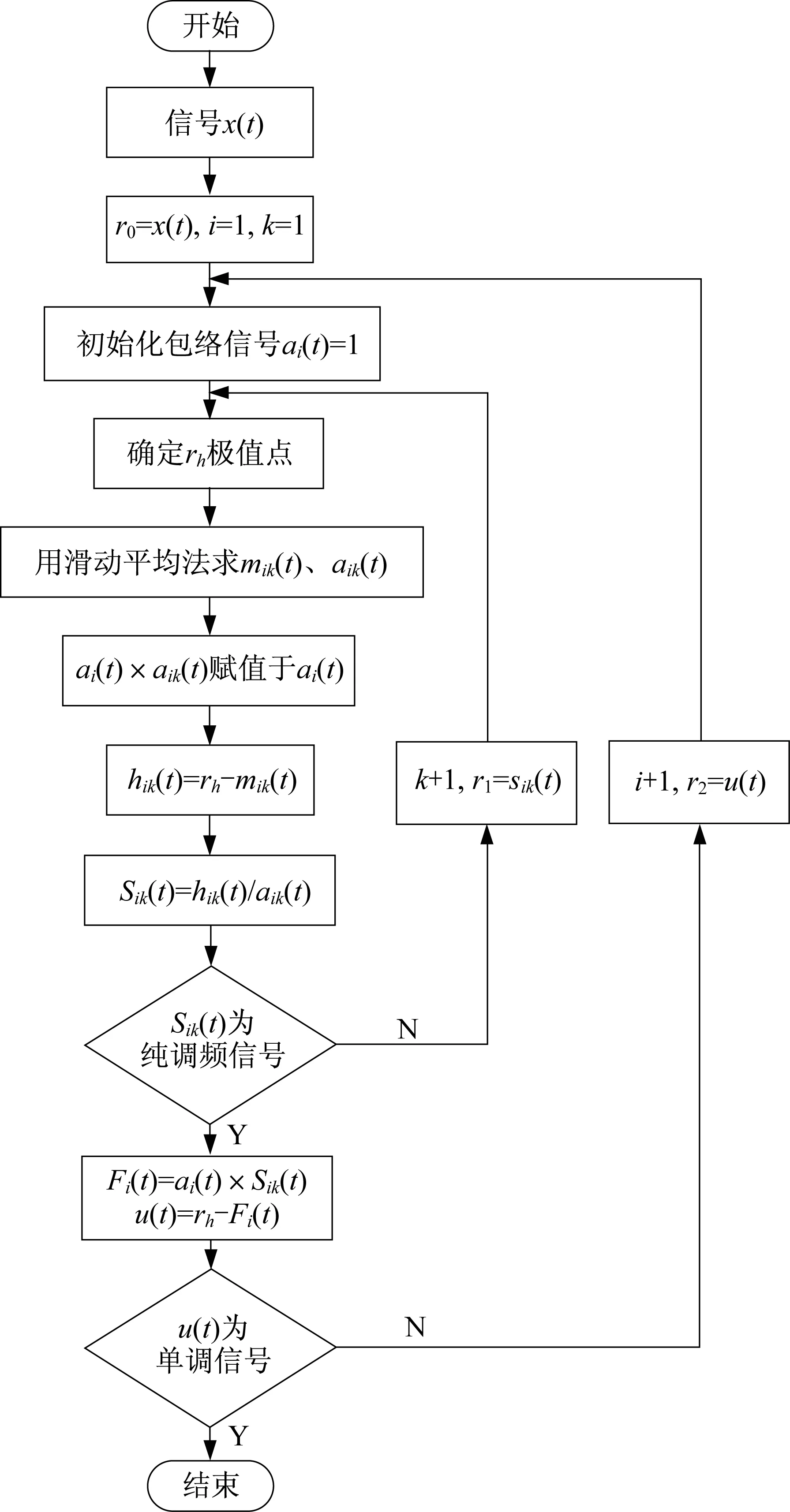
局部均值分解的详细分解流程如图1所示。图1中,k为迭代次数,r0为初始信号;rh为初始信号r0处理后得到的分量信号,h为1、2,mik(t)为第i个乘积函数分量第k次迭代后的局部均值函数,aik(t)为第i个乘积函数分量第k次迭代后的局部包络估计函数,ai(t)为第i个乘积函数分量相对应的瞬时幅值,hik(t)为第i个乘积函数分量第k次迭代后分离出mik(t)的剩余信号,Sik(t)是第i个乘积函数分量第k次迭代的中间转换变量。
当滚动轴承发生故障时,传感器采集的振动信号中同一频带内信号的能量有很大差异[7],因此,选取经局部均值分解的乘积函数分量的能量百分比值作为支持向量机识别的特征参数。对轴承故障振动信号特征值提取的步骤有三步。
第一步,振动信号经局部均值分解得到若干乘积函数分量,各乘积函数分量的能量Ei为:
Ei=|Fi(t)|2dt
(2)
第二步,求乘积函数分量能量的总和E:
(3)
第三步,求各乘积函数分量的能量占比,选取能量比值构造特征能量向量T:
(4)
3 细菌觅食优化算法原理
细菌觅食优化算法是根据大肠杆菌在环境中寻找食物的原理抽象出来的一种智能算法,包括趋向性操作、复制操作、迁徙操作三个基本过程[8]。
(1) 趋向性操作。参数初始化,包括细菌总数S、迁徙概率Ped、趋向次数Nc、单向最大游动次数Ns、复制次数Nre、迁徙次数Ned。设Pm(s,p,q)为第m个细菌第s次趋向性操作、第p次复制操作、第q次迁徙操作后的坐标,第s+1次趋向性操作后的坐标为:
Pm(s+1,p,q)=Pm(s,p,q)
+Cm(s,p,q)Y(s,p,q)
(5)
式中:Cm(s,p,q)为趋向性步长向量;Y(s,p,q)为方向向量。
第q+1次迁徙和第p+1次复制趋向性步长向量关系为:
▲图1 局部均值分解详细分解流程
Cm(s,p,q+1)=Cm(s,p,q+1)/N1
(6)
Cm(s,p+1,q)=[max(F(s,p,q))
-min(F(s,p,q))]/N2
(7)
式中:F(s,p,q)为细菌适应度值;N1为第m个细菌趋向性操作的次数;N2为比例缩放因子。
若第m个细菌个体没有发生迁徙,则有:
Cm(s+1,p,q)=Cm(s,p,q)
(8)
否则,有:
Cm(s+1,p,q)=Cm(s,p+1,q)
(9)
(2) 复制操作。设细菌种群数为M,先对所有细菌的适应度值降序排列,再将排名靠前的M/2个体细菌替换排名靠后的M/2个体细菌。
(3) 迁徙操作。一定概率下,当某个细菌个体满足迁徙的条件时,细菌个体自身消失,并随机产生一个新的细菌个体替代原来的个体,保持种群细菌数均衡。
4 支持向量机原理
支持向量机的基本原理为构造一个超平面,对数据样本进行划分,使分开的样本点到超平面之间的最短距离为最大[9]。最优分类超平面如图2所示。设二维训练样本集为{(xn,yn),n=1,2…e},图2中空、实心圆代表不同种类样本点,共e个。两类样本点被最优分类超平面ω·xl+b=0分开,xl为超平面上的点,ω为超平面法向量,b为常数项,L1、L2分别为与最优分类超平面直线距离最短且平行的样本平面。面对线性不可分问题,引入非负松弛因子ξ来提高支持向量机的学习能力,最小目标函数minφ(ω)为:
当前的航空旅游业是一个“内外兼修”的行业,这就在一定程度上促进了航空旅游业形成其独有的涉外性的特点。在航空旅游业中包括国内航空业、国外航空业以及国内和国外出境旅游等服务项目,所以这使得当前的航空旅游业要想在激烈的竞争市场当中站稳脚步就必须要坚持对外开放的理念。
(10)
式中:C为误差惩罚因子,用于决定样本数据分类误差的接受程度。
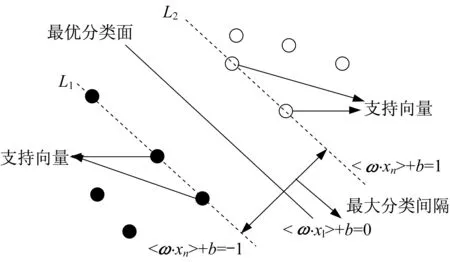
▲图2 最优分类超平面
支持向量机的核函数选择高斯径向基核函数[10],支持向量机模型决策函数f(x)为:
(11)
(12)
(13)
式中:K(x,xn)为径向基核函数,表示测试样本x和第n个训练样本xn映射到特征空间后的内积;λn为第n个测试样本的拉格朗日因子;g为核函数参数;σ为核函数带宽。
5 改进支持向量机模型
通过上述理论分析得出,支持向量机模型判别的准确率主要取决于误差惩罚因子C和核函数参数g,因此,笔者通过应用细菌觅食优化算法选取最优C和g。检验支持向量机性能好坏最直观、最有效的标准是模型输出的识别准确率。选取支持向量机作为细菌觅食优化算法评估适应度函数,将随机初始化参数组{C,g}代入支持向量机,计算得出的识别准确率作为细菌觅食优化算法的适应度值,并与前一组进行比较,将大的适应度值保存,作为新的阈值适应度值。细菌觅食优化算法优化支持向量机模型参数C、g的流程如图3所示。

▲图3 支持向量机参数优化流程
6 轴承故障诊断实例
6.1 振动信号采集
试验数据采用美国凯斯西储大学轴承实验中心的电机驱动端轴承故障振动信号。试验中滚动轴承型号为SKF6205-2RS,采用加速度传感器进行数据采集,采样频率为12 kHz,电机转速为1 797 r/min。内圈、外圈、滚动体三种故障振动加速度信号时域图如图4所示,各采集振动信号50组,每组2 000个数据点。

▲图4 轴承部件故障振动加速度信号时域图
6.2 特征向量提取
为了验证提出的基于局部均值分解和改进支持向量机的滚动轴承故障诊断方法的可靠性,对采集到的共150组振动信号进行局部均值分解,得到一系列乘积函数分量。考虑篇幅,仅以轴承内圈故障为例进行分析说明。一组内圈故障振动信号局部均值分解结果如图5所示。由图5可知,故障特征信号都被包含在前五个乘积函数分量中,且每个乘积函数分量所包含的特征分量呈依次减少趋势。求出五个乘积函数分量的能量百分比值,并进行归一化处理,使各乘积函数分量包含故障特征信号的差异性最大化。随机抽取轴承三种故障状态各四组,各组乘积函数分量能量百分比值分布规律如图6所示。由图6可知,三种类型故障振动信号的乘积函数分量能量百分比值分布规律存在明显差异,同一故障类型的能量百分比值具有较好的重复性。内外圈各四组乘积函数分量能量百分比值完全重合,滚动体四组乘积函数分量能量百分比值虽然没有完全重合,但很接近,并且与内外圈的差异较大。因此,可以将每种类型故障信号的能量百分比值作为特征向量,输入支持向量机模型进行训练判别。

▲图5 内圈故障信号局部均值分解结果
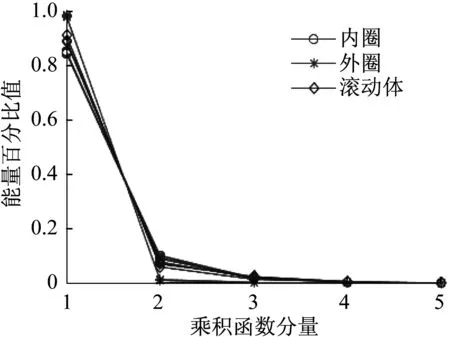
▲图6 轴承部件故障振动信号乘积函数能量百分比值分布规律
6.3 改进支持向量机模型诊断分析
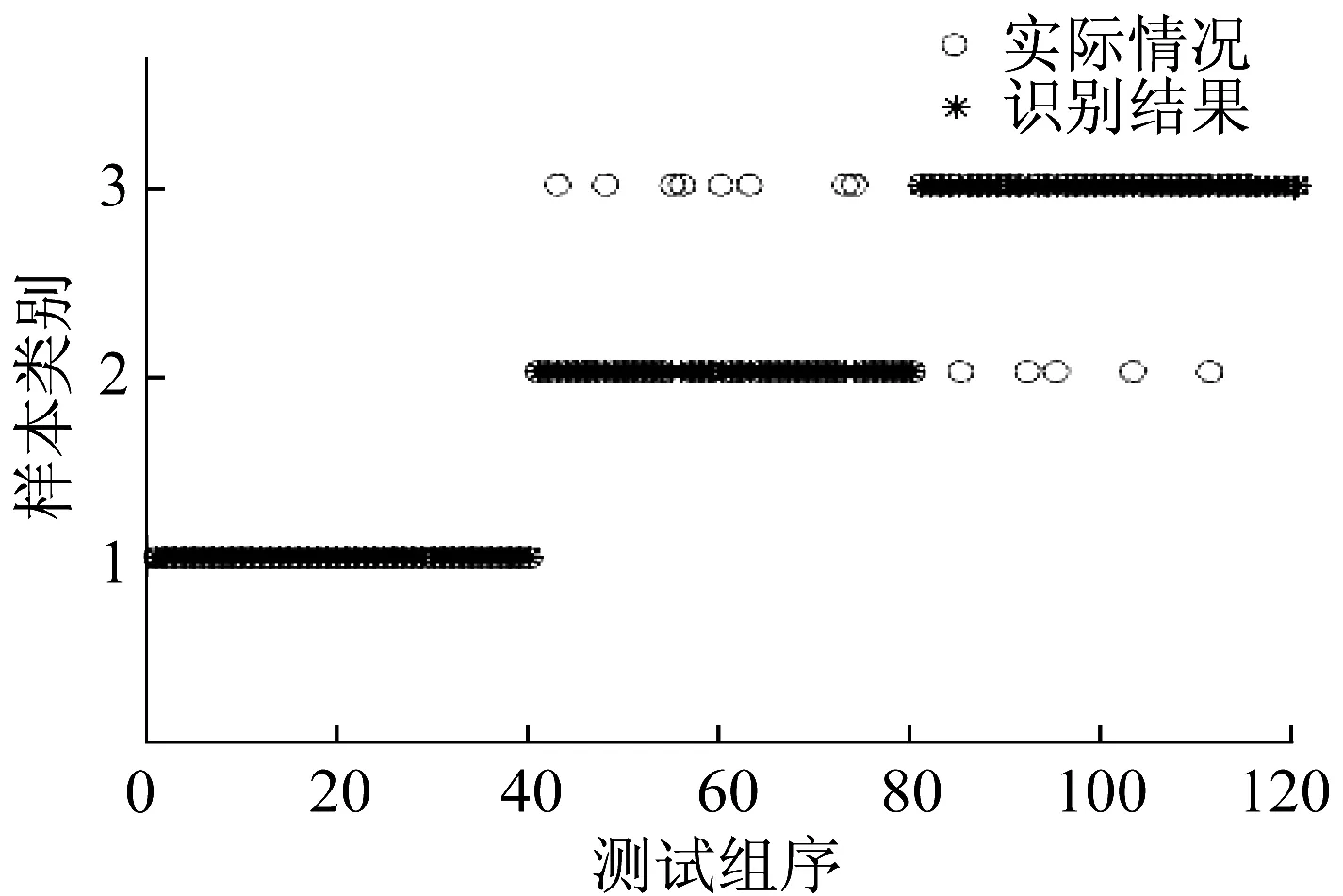
将剩余的120组测试数据代入改进支持向量机模型进行预测判别。为了验证笔者所提出算法的优越性,将改进支持向量机模型与原始默认C为1、g为1的支持向量机模型,以及隐马尔可夫模型的识别结果进行对比[11]。三种算法的识别结果分别如图7、图8、图9所示,对比结果见表1。
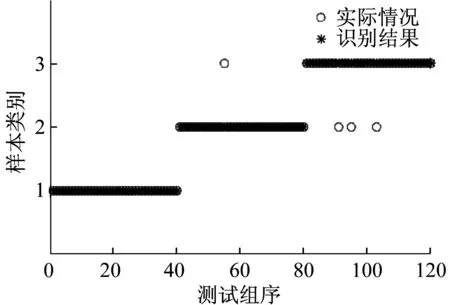
▲图7 改进支持向量机模型识别结果
▲图8 传统支持向量机模型识别结果
▲图9 隐马尔可夫模型识别结果

表1 算法识别结果对比
通过对比可知,三种算法对轴承故障类型的识别都存在一定的误判现象,但改进支持向量机模型的总体识别正确率达到了96.7%,相比传统支持向量机模型和隐马尔可夫模型,总体识别正确率分别提高了7.5个百分点和9.2个百分点。对于未能100%识别轴承故障,由两个原因造成。一是内圈和滚动体提取的个别特征向量值非常接近,二是模型的训练样本不充分。
7 结论
笔者提出的基于局部均值分解与改进支持向量机的轴承故障诊断方法具有以下优点:
(1) 局部均值分解能够准确自适应分解出故障信号的特征信息,试验证明,选取局部均值分解后各乘积函数分量的能量百分比值作为表征轴承故障状态的特征值,具有良好的差异性和重复性;
(2) 应用细菌觅食优化算法对支持向量机参数进行寻优,找出支持向量机全局最优的惩罚因子和核函数参数,通过试验验证了方法的有效性和可靠性;
(3) 基于局部均值分解与改进支持向量机的轴承故障诊断方法效果较优,是一种新的滚动轴承故障诊断方法。
猜你喜欢
基层中医药(2021年12期)2021-06-05 06:56:26
小学生学习指导(中年级)(2021年3期)2021-04-06 09:12:08
智族GQ(2019年9期)2019-10-28 08:16:21
数学年刊A辑(中文版)(2018年1期)2019-01-08 01:58:22
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
纺织科学研究(2017年6期)2017-07-03 12:14:15
高中生学习·高三版(2016年1期)2016-05-30 05:45:06
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01 03:46:20
数学学习与研究(2015年15期)2015-05-30 01:17:26
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:54:01
