合成孔径雷达参数化成像技术进展
2021-07-05 11:30曾涛温育涵王岩丁泽刚卫扬铠袁跳跳
雷达学报 2021年3期
曾涛 温育涵 王岩* 丁泽刚 卫扬铠 袁跳跳
①(北京理工大学信息与电子学院雷达技术研究所 北京 100081)
②(北京理工大学重庆创新中心 重庆 401120)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种通过主动发射和接收电磁波,对感兴趣区域进行全天时全天候微波成像的电子设备。与“所见即所得”的光学设备不同,SAR回波需进行数据处理后方可成为图像。传统的SAR成像处理过程可视为点目标散射模型约束下数据空间到图像空间的映射,但在真实的场景中,绝大部分目标具有延展性,这些延展性目标的散射特征在不同的观测角度下变化剧烈,不再与点目标散射模型匹配,使用传统SAR成像处理后,延展目标图像中往往仅呈现为多个强散射点,丢失了重要的结构性信息,严重降低了SAR图像的应用价值。
为了描述这种现象,图1以美国空军实验室(Air Force Research Laboratory,AFRL)铲车数据为例[1],展示了线型结构在不同观测角度下的散射图像。从图1(b)和图1(c)可以看出,在不同观测角度对铲车的铲斗进行观测时,铲斗的线型结构变化剧烈。正对铲斗进行观测时,铲斗的轮廓完整可见;侧对铲斗观测时,整个铲斗特征几乎完全消失,各个线结构退化为端点处的两个散射中心,这些散射中心很难与点目标区分。识别这些散射中心并重建遥感图像中消失的几何结构对于提高图像的可理解性具有很大的应用价值。造成铲斗结构消失的关键是在某些观测角度下,由于目标表面相对电磁波波长而言起伏较小,雷达回波以相干抵消的方式相互叠加,导致某些目标区域的雷达回波信号完全消失,最终使目标雷达图像仅仅呈现为多个强散射点。
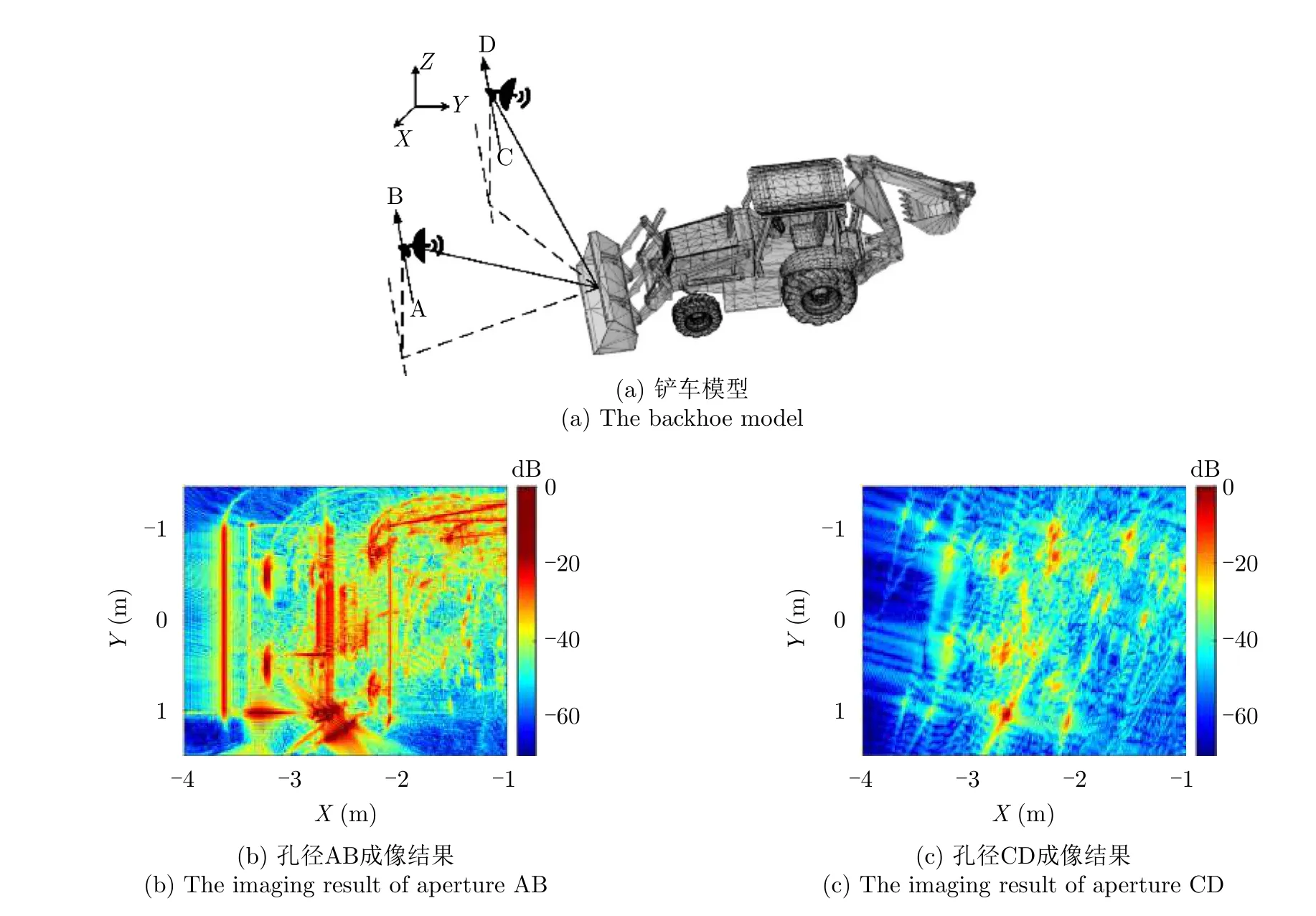
图1 美国空军实验室铲车数据成像结果Fig.1 The imaging result of the backhoe from the AFRL
根据其处理回波数据的方式,SAR成像算法通常可分为线性处理方法和非线性处理方法。传统成像算法如后向投影[2,3]、距离多普勒算法[4]、Chirp Scaling算法[5]等均属于线性处理方法。上述算法实现较为简单,成像效果稳定,应用广泛。然而传统的SAR成像算法大多数均基于点目标散射模型,但在实际应用场景中,大多数观测场景均包含延展性的目标,这些延展性目标的散射特征在不同的观测角度下变化剧烈,不再与点目标散射模型匹配,使用传统SAR成像处理后,延展目标的图像中往往仅呈现为多个强散射点,丢失了重要的结构性信息。为解决延展目标成像失真问题,利用多角度观测的方法捕获延展目标更多的各向异性散射信息,在一定程度上提高了图像的质量与可理解性[6–12]。圆迹SAR是一种典型的线性多角度成像技术。圆迹SAR可以凭借其独特的航迹优势,通过时域成像算法处理全角度回波数据来得到被照射场景完整的散射特征[9,10]。然而,也正是其独特的航迹需求,导致圆迹SAR很难应用于绝大多数遥感成像平台,如星载SAR平台。
非线性成像技术主要包含多角度SAR图像融合和压缩感知SAR成像等技术。多角度SAR图像融合是一种典型的非相干成像技术,利用多幅图像中所包含的多角度散射信息,通过非相干处理生成融合的图像[6–8]。与处理前的单个图像相比,融合的图像可以更具体、准确地描述被照射目标的特征。观测视角的选择对于多角度SAR图像融合十分重要。不合理的观测角度设置可能会导致融合的图像相对于融合前的单一图像提升有限。关键的原因是对于滑动型散射和各向异性型散射而言,其主要的能量往往集中在一个极小的观测视角范围内。例如,由于镜面散射效应,直线型目标回波的能量主要集中在直线的法线附近。当雷达正对线目标观测时,直线可以完整地成像,否则只有两个端点可以被成像。如果多角度融合的观测视角设置不合理,那么很可能所有的子图像都无法捕捉到目标重要的散射特征,导致融合的图像相对单一图像提升有限。压缩感知SAR成像技术是一种非线性成像技术。压缩感知的基本思想是利用稀疏特性,利用压缩感知重构算法对原始目标进行重构[13–15]。雷达成像中的目标大多数情况下是稀疏的,或通过某种稀疏变换可以达到稀疏。相比于传统线性处理算法,压缩感知SAR成像具有采样率低、数据量小、成像质量高、分辨率高等优点。尽管基于压缩感知的雷达成像方法能够有效突破传统线性处理方法的局限,但是在低信噪比情况下,压缩感知图像中会出现较多虚假目标和斑点噪声,成像效果受噪声影响大。其中一个重要原因是压缩感知成像算法是对目标场景进行点目标估计,在实际应用中存在一定的模型失配问题,没有利用散射点之间的联系以及蕴含在回波数据中的目标几何信息。
SAR参数化成像是一种非线性处理框架下的新方法,成像过程兼顾了点目标和延展目标的散射模型,在一定程度上解决了成像过程中的模型失配问题,对延展目标成像时,具备获得较传统算法更佳质量的潜力[16]。SAR参数化成像主要由目标建模、参数估计和图像重构3个环节构成,如图2所示。目标建模环节充分考虑点目标与延展目标的差异性,为成像过程提供依据;参数估计是依据回波或图像的相位与幅度特征对观测角度的差异性,辨识目标类别;最后结合目标散射模型与参数化估计结果,重构目标回波并成像,可恢复传统SAR图像中消失的结构信息。相较于传统多角度成像技术,参数化成像对航迹或观测角度的需求相对更低。SAR参数化成像效能与延展目标类别联系密切,本文重点介绍线型延展目标的参数化成像,对应真实场景中大量存在的边缘类结构。

图2 参数化成像流程图Fig.2 The block diagram of parametric imaging
SAR参数化成像主要有两种实现方式:基于回波域的实现方式和基于图像域的实现方式[17,18]。基于回波域的参数化成像方法核心为利用不同类型目标在回波域的相位随观测角度的变化特征,进行参数估计并辨识不同结构,最后通过散射模型重建目标。基于图像域的参数化成像方法的核心是利用不同类别目标图像的相位对观测角度的敏感性特征,辨识目标类型并反演散射参数,进而根据参数化模型在图像中重建目标。
本文第2节主要介绍典型结构的参数化散射模型。第3节主要介绍基于回波域和基于图像域特征的参数化成像方法。第4节对文章进行总结并展望未来参数化成像的发展前景。
2 典型结构的参数化散射模型
各类基础几何结构的参数化散射模型是参数化成像特征提取的核心,也是目标图像特征重建的基础。本节主要介绍了线、面的参数化散射模型。目前,参数化成像主要集中在针对线型结构的研究上,为此本节着重介绍了线型结构的散射模型。作为基本的几何元素,直线型和曲线型结构是各种平面、体目标的基本单元,也是车辆、飞机、油罐等各类目标的重要组成部分。线型结构在遥感图像中随不同的观测角度变化剧烈。由于镜面散射效应,线目标在绝大多数情况下仅仅表现为两个位于端点处的强散射中心,这些强散射中心很难与普通的点状目标区分。
线目标根据其散射特征,可以分为直线型目标和曲线型目标。根据电磁散射理论,各类延展目标的散射特性可依据其电尺寸分为瑞利区、谐振区和光学区[19]。在光学区,目标的电尺寸远大于雷达的波长。传统的SAR一般工作在光学区。几何绕射理论(Geometrical Theory of Diffraction,GTD)指出,在光学区,被照射目标的散射特征主要由镜面反射和诸如边缘、棱角等不连续处的散射共同决定[20]。在这种情况下,各类目标的后向散射可以表示为多个强散射中心的矢量叠加。根据实际散射特征,延展性目标的散射类型可以分为色散型散射、滑动型散射和各向异性型散射。色散型散射的主要特征是散射中心随频率会发生变化,这种散射常见于腔体结构。滑动型散射的主要特征是散射中心的位置会随观测角度变化,其位置常常出现于各类曲线、曲面的表面。各向异性型散射主要出现在各类直线型结构中,其主要表现为线型结构的消失,SAR图像中只存在线型结构的两个端点。直线型目标属于各向异性型散射,曲线型目标属于滑动型散射。
2.1 直线型结构的散射模型
由于镜面散射效应,直线型结构的散射特征随观测角度变化剧烈。当雷达正对其观测时(即雷达航迹经过线型结构的法平面),整个直线结构可被完整成像;否则,只有直线结构的两个端点可以被成像。为了更好地描述直线型结构的散射特征,图3给出了由CST三维全波电磁场仿真软件(CST Studio Suite,CST)计算得到的金属圆柱在不同观测角度的成像结果。在孔径AB的SAR图像中,直线型结构表现为2个端点目标,这种现象会导致图像中的各种散射点难以区分,进而影响遥感图像的应用价值。这种各向异性型散射现象在各类面目标和体目标中也十分常见。
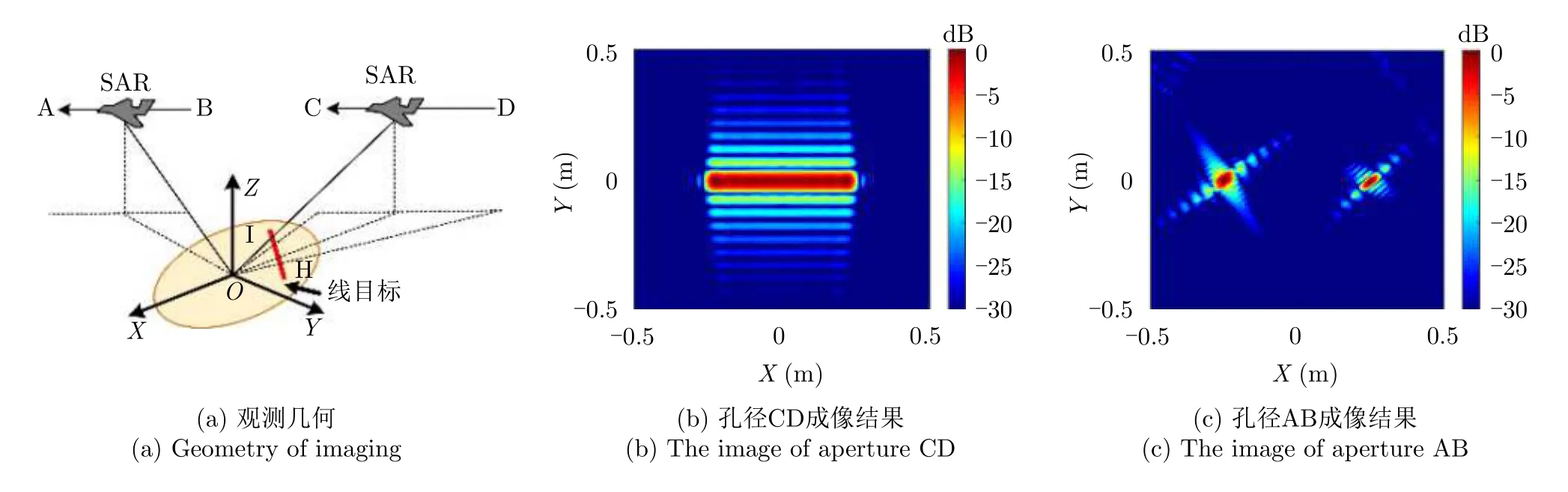
图3 直线型结构不同角度成像结果Fig.3 Images of a linear structure with different observation angles
在平面波假设下,根据文献[21–29],电大尺寸的直线型目标在距离频域方位时域通常可建模为
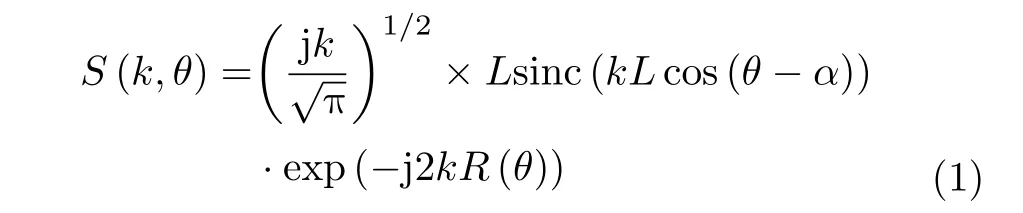
直线型目标的回波信号在距离频率方位时域为辛格(sinc)函数的形式,如图4所示。不同观测角度下,雷达实际上接收到的是辛格函数不同的区域[22]。在孔径CD处,雷达接收到的信号是辛格函数的主瓣区域,此时,线目标在图像中整体可见。在孔径AB处,雷达接收到的信号是辛格函数的副瓣区域,此时线目标在图像中只有两个端点可以被成像。造成这一现象的原因是辛格函数的副瓣与余弦函数高度相似,而两个点目标回波可以表示为余弦函数的形式:
图4 直线型目标与回波信号示意图Fig.4 The linear structure and its echo

其中,ψ=(ψ1+ψ2)/2是与两个点目标初始相位有关的相位项;L为两个点目标的距离;R是雷达到两个点目标中点处的斜距历程,其他参数与线目标一致。
2.2 曲线型目标的散射模型
曲线型目标属于滑动型散射。正对曲线型结构观测时,只有一段圆弧可以被成像出来,且被成像的圆弧只是整个圆弧的一部分。如图5(a)所示,设雷达起始位置到圆弧中心点的连线AO与圆弧的交点为H,雷达终点位置到圆弧中心点连线BO与圆弧的交点为I,则整个子孔径AB的成像图中,只有弧形HI可以被成像。特殊的是,如果HI与整个圆弧刚好重叠,则整个圆弧可以被成像出来。当雷达对曲线型结构侧向观测时,即图5中孔径CD,则整个圆弧只有2个端点可以被成像,其余结构完全消失。在侧向观测时,直线型和曲线型目标均表现为2个端点目标,这种现象会导致图像中的各种散射点难以区分,进而影响遥感图像的应用价值。因此,识别SAR图像中的端点类散射中心,重建消失的直线型与曲线型结构,恢复目标完整的几何特征对于提升遥感图像质量具有很大的潜力。

图5 曲线型结构不同角度成像结果Fig.5 Images of a arc structure with different observation angles
利用驻定相位原理,基于几何光学方法,曲线型目标的散射模型可表示为分段函数的形式
其中,A为与散射强度相关的常数;ωa为方位向包络;ψ为相位;θ为雷达观测角度;k为波数;(x0,y0)为曲线的中心点坐标;rc为半径;Θ1为圆心角范围;Δϕ为圆心角大小;ϕc为朝向;R为雷达到曲线中心点的斜距历程。
曲线目标在距离频域方位时域的回波信号在主瓣可表示为方波函数,在副瓣为辛格函数。如图6所示。若雷达捕获到了回波主瓣区间,则部分圆弧可以被成像出来;否则,若雷达只捕获到了副瓣区域,则只有圆弧的两个端点可以被成像,这一现象与直线型结构非常相似。
图6 曲线型目标与回波信号示意图Fig.6 The arc structure and its echo
2.3 面目标与体目标的散射模型
考虑到实际应用场景中更为常见的平面、三维物体等复杂目标,需要建立完备的散射模型以描述目标散射特性对频率、方位角与俯仰角的依赖关系。目前应用较为广泛的主要有:美国俄亥俄州立大学研究团队提出的三维标准散射体模型,麻省理工学院提出的典型体散射模型,以及国内何洋、周剑雄等多个团队提出的GTD散射模型等。本文主要介绍美国俄亥俄州立大学提出的标准散射模型。
三维目标散射特性存在对频率、方位角与俯仰角的依赖关系,任意观测场景中的雷达回波信号可以表示为多个独立散射体的叠加:

其中,k为波数;Λ(τ)为与俯仰角φ和方位角θ有关的函数;Θm为不同类型目标的几何类型参数;R为斜距历程;Pβ(m)为极化矩阵,β(m)代表不同类型的散射体;MΓ(m)为目标的包络函数,Γ(m)代表不同类型的散射体。以式(4)为基础,美国俄亥俄州立大学的安娜等人相继提出了平板、圆盘、二面角、三面角、圆帽等面目标与体目标的散射模型。以矩形平板为例,长度为L宽度为H的矩形平板雷达回波信号的包络可表示为

其中,M1与M2分别为两个一维的线目标散射回波包络。其余类型目标具体可参考美国俄亥俄州立大学的Jackson等人[21]所提出的模型。
在雷达观测视角变化剧烈的情况下,适用于面目标与三维目标的散射模型可以为目标识别等技术提供更有效的支持。此外,受限于有限的观测视角与信号带宽,雷达仅能获取极为有限的数据,若散射模型可以高效描述目标宽频全向散射特征,则可以利用参数化成像技术对图像中的目标进行重建和增强,改善成像的性能,提升可读性。
3 线型目标参数化成像方法
作为一种非线性处理框架下的新方法,SAR的参数化成像兼顾了理想点目标和延展目标的散射模型,在一定程度上解决了传统成像过程中的模型失配问题。SAR参数化成像主要由目标建模、参数估计和图像重构3个环节构成。第2节主要介绍了线型结构和面、体结构的参数化散射模型,目前参数化成像主要集中在针对线型结构的研究上。依据现有的参数化成像特征提取的方式,参数化成像方法可分为回波域方法和图像域方法。
3.1 回波域方法
真实目标的轮廓大多由直线型结构组成。这种直线型结构提供了有关目标的重要几何信息,对人类视觉感知和图像中目标的识别至关重要。然而,由于雷达接收回波的相干叠加特性,SAR图像中目标的连续边缘出现了离散化现象,仅有位于边缘外侧的两个端点可以被成像,严重影响了SAR图像视觉和几何信息的提取。文献[17]着重解决了恢复平滑线性边缘(Smooth Linear Edges,SLE)的问题。它通过引入多角度观测,提出了一种SAR参数图像重建方法(SAR Parametric Image Reconstruction Method,SPIRM),该方法建立了一个参数化框架,从回波域中恢复平滑线性边缘结构。SPIRM的核心用到了一个被称为散射相位突变的特征(Scattering Phase Mutation Feature,SPMF),该特征是区分线型边缘结构和点目标的一个重要特征。在文章中,基于微波暗室实验验证了该方法的鲁棒性和有效性。
由第2节介绍的直线型目标的散射模型可知,直线型目标在距离频域方位时域的回波信号可以表征为辛格函数的形式。在照射直线型结构时,雷达在不同观测角度下所接收的信号为辛格函数的不同部分。当雷达扫过直线型目标的法平面时,辛格函数的主瓣区域被雷达捕获,此时整个直线可以被完整成像。否则,只有直线的两个端点可以被看到。造成这一现象的根本原因是辛格函数的旁瓣和两个点目标的回波信号在形式上十分接近,这也导致了它们在图像中十分相似。两个点目标的回波可以表示为
其中,Ap为与两个点目标反射强度相关的因子;L为两点间距离;φ为雷达观测视角;R为斜距历程;k为波数;φp为与点目标初相相关的因子。
上述公式的证明可参照文献[17]和文献[18]。据此可以发现,辛格函数的旁瓣和双点目标的回波非常相似。因此,在回波域中,可以将辨识点、线目标的问题转化为辨识余弦函数和辛格函数的问题。

基于这一核心问题,文献[17]提出了基于双角度的点线目标回波域辨识方法。辛格函数与余弦函数最本质的区别在于,辛格函数左右两侧的旁瓣包络在主瓣处存在相位突变,这一特征如图7所示。

图7 辛格函数与余弦函数的包络示意图Fig.7 The envelope of sinc function and cosine function
由图7可以看出,辛格函数的双侧包络在主瓣处存在相位跳变,而余弦函数在主瓣处相位连续,因此只需分别捕获辛格函数与余弦函数在两侧的旁瓣,通过估计其在主瓣处的相位即可实现线目标与点目标的辨识。

随后,需根据目标的辨识类型对目标参数进行估计,进而在图像中重建目标特征,如图8所示。参数估计主要分为两个部分:参数粗估计和精估计。参数粗估计主要依靠图像中端点目标的位置获取粗估计结果。需要估计的线目标参数主要包含长度、朝向、中心坐标。设图像中提取到的端点坐标为(x1,y1)和(x2,y2),则线目标参数粗估计结果为

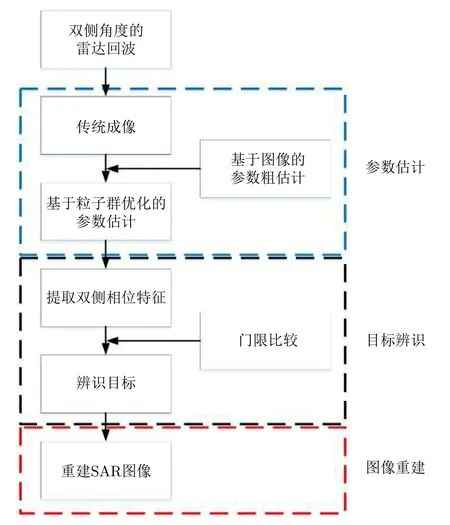
图8 基于回波域特征的参数化成像方法框图Fig.8 The block diagram of parametric imaging method based on echo domain features
接着以粗估计结果为初始值,利用粒子群优化(Particle Swarm Optimization,PSO)方法在粗估计结果的邻域中进行搜索,即可获得参数精估计结果。依据辨识与估计结果和参数化散射模型,SAR图像中消失的直线型边缘结构可以得到恢复。微波暗室实验验证了所提方法的有效性,其场景示意图如图9所示。在图10(a)与图10(b)中,A1和 A2为金属线目标,B1和B2为金属球体。

图9 微波暗室实验场景图Fig.9 The observation geometry in the microwave anechoic chamber
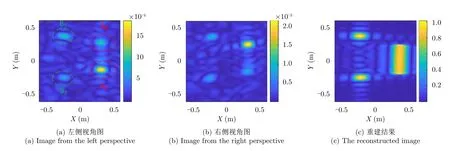
图10 实验结果Fig.10 Experimental results
除此以外,文献[17]还利用美国空军实验室铲车数据集验证了方法的有效性。基于回波域特征的参数化成像方法可以准确地在多个点目标中完整地恢复出铲车的铲斗部分。结果如图11所示。
实验结果表明,基于回波域特征的参数化成像方法可以明显增强铲车铲斗的直线型结构。而在传统SAR图像中,各类直线型几何结构在SAR图像中均为强散射点,因此,基于参数化成像方法的直观可视化效果更强。基于回波域特征的参数化成像方法兼顾了点目标和延展目标的散射模型,在一定程度上解决了成像过程中的模型失配问题,对延展目标成像时,几何特征更为明显。与传统的线性SAR成像技术往往只需单角度数据相比,基于回波域特征的参数化成像方法需要至少两个离散的观测角度回波数据。除此以外,由于目标辨识中的相位提取处理是在回波域进行的,对于处理多个独立的延展性目标,该方法可能无法准确提取目标的相位,进而影响性能。
3.2 图像域方法
3.2.1 基于多角度相位特征的参数化成像
直线型结构具有与普通点目标截然不同的散射特征。在某些观测角度下,直线型结构完全消失,只剩下两个外侧的端点可以被成像。这些端点目标在图像中很容易与普通点目标混淆,因此辨识SAR图像中直线型结构的端点目标和普通点目标具有强烈的意义。在SAR图像中,各类目标根据其空间位置在图像中分布,而在回波域中,各类目标的后向散射回波混叠在一起,难以区分,因此通过提取图像域中散射中心的特征具有很大的优势。由于直线型结构的端点与普通点目标存在各向异性差异,文献[18]从直线型结构端点的图像域相位特征入手,提出了基于多角度相位特征的目标辨识与重建方法。对于直线型目标端点,文献[18]给出了端点的图像域解析式

其中,L为直线结构的长度;ϕi为直线结构的朝向;φ为雷达观测视角;B为带宽;f0为中心频率。
不同观测角度下,直线型结构的端点随观测视角变化剧烈,特别是位于直线结构法平面两侧时,左侧与右侧图像中端点目标的相位会出现180°的跳变。利用这一特征可以较为轻松地辨识直线型结构端点与普通点目标。图12和图13分别展示了理想点目标和端点目标的SAR图像与不同观测角度下图像域相位的变化结果。

图12 点目标SAR图像与不同观测角度下相位的变化结果Fig.12 The SAR image of a point target and the phase feature

图13 端点目标SAR图像与不同观测角度下相位的变化结果Fig.13 The SAR image of an endpoint and the phase feature
利用配准的SAR图像,通过提取点目标不同角度下的图像域相位特征,即可逐个辨识不同点状目标的类型。在识别出散射点的类型后,可根据其图像位置,估计直线型结构的几何参数。

依靠参数化散射模型,可以将SAR图像中消失的直线型结构重建。文献[18]利用微波暗室和多发多收(Multiple Input Multiple Output,MIMO)雷达进行了多组试验,验证了方法的有效性,图14—图17分别给出了微波暗室和MIMO雷达的实验结果。
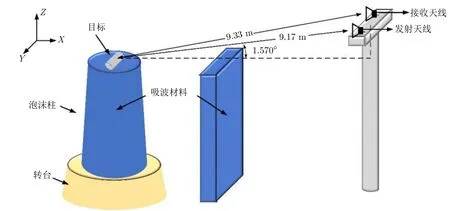
图14 微波暗室场景示意图Fig.14 The observation geometry in microwave anechoic chamber

图15 金属圆柱和金属球光学图片Fig.15 The optical images of the metal cylinder and spheres
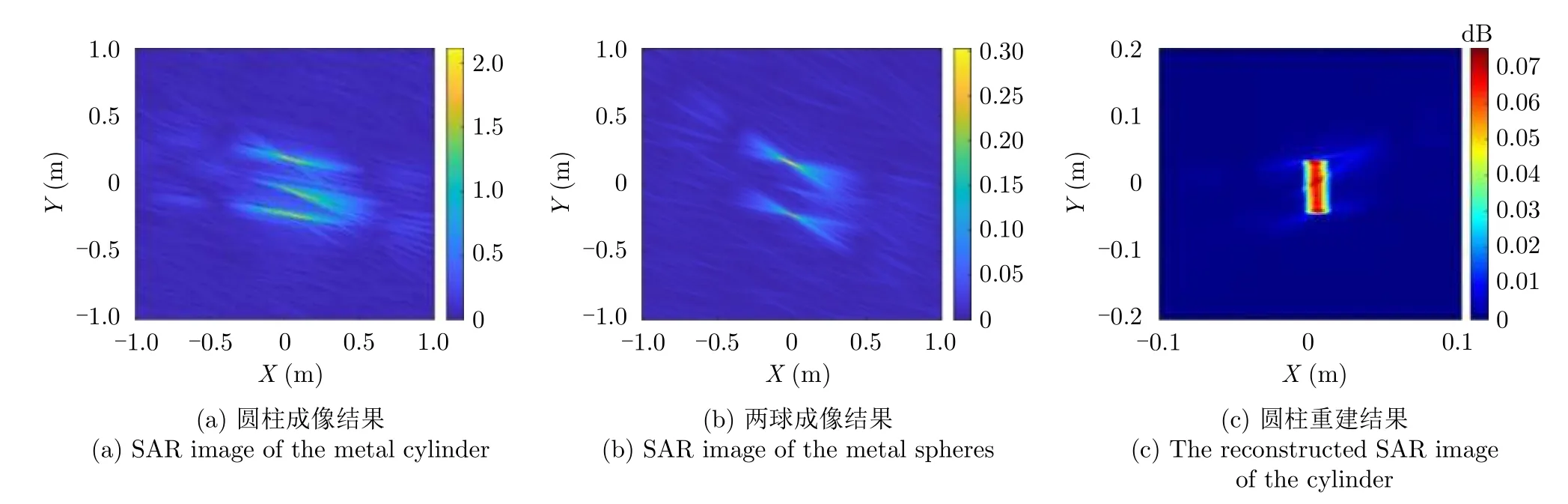
图16 微波暗室成像结果Fig.16 The results of the microwave anechoic chamber experiment

图17 基于MIMO雷达的球门实验结果Fig.17 Experiment results based on MIMO radar
实验结果表明,基于多角度相位特征的参数化成像可以在SAR图像中重建金属圆柱、金属栏杆等直线型几何结构,相比于传统SAR图像中的点目标而言,直观可视化效果更强。
3.2.2 基于宽角度幅度特征的参数化重建
根据理想点散射模型,普通点目标在图像域的解析式可表示为

其中,Ai与散射强度有关;φi为该点目标的初始相位。
直线型结构端点的幅度随不同观测角度变化剧烈,因此,利用宽角度的雷达数据,通过提取散射点沿方位角变化的幅度信息可以有效识别直线型结构的端点与普通点目标。图18分别展示了图像域中普通点目标与直线型结构的端点随不同观测角度的幅度变化,相关数据由CST电磁仿真软件计算得到[28]。可以看出,相较于普通点目标,直线型结构端点的散射特征变化很大。
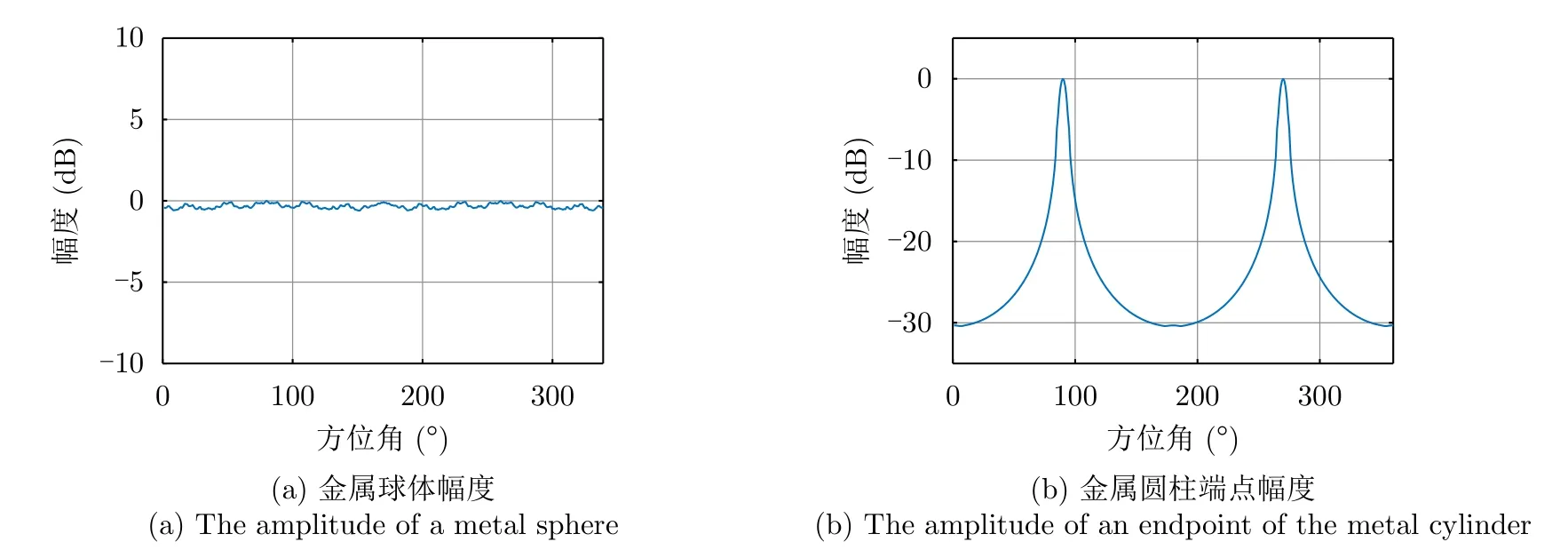
图18 雷达不同观测角度下不同类型点目标的幅度变化图Fig.18 The amplitude of different types of point targets under different observation angles of radar
针对这一特征,文献[30]和文献[31]采用一个单位矩阵作为单个散射中心幅度变化的标准正交基,把对散射中心特征提取转化为求线性方程的最小二乘解问题,从而实现对直线型结构端点的特征估计。该方法的主要流程以及目标重建结果如图19和图20所示。

图19 基于宽角度幅度特征的目标辨识方法框图Fig.19 Block diagram of target identification method based on wide-angle amplitude feature
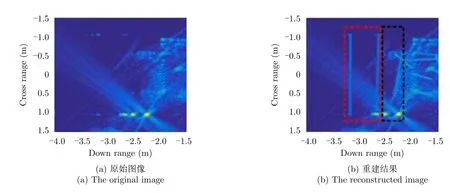
图20 基于美国空军实验室铲车数据重建结果Fig.20 The experimental results of the backhoe from the AFRL
在回波域中,各类目标的回波信号混叠在一起,难以分离辨识。在图像域中,各类雷达观测的目标根据其空间位置在雷达图像中完全分开,因此与基于回波域特征的参数化成像方法相比,图像域参数化成像方法可以更高效地处理多目标数据。除此以外,与回波域方法相比,图像域方法不需要应用粒子群优化等方法对目标的各个参数进行精确估计,因此计算量相比于回波域方法较低。虽处理多目标数据具有一定优势,但基于图像域特征的参数化成像方法依然具有一定的局限性。其中,基于图像域相位特征的参数化成像方法需要至少两个离散的观测角度和对应的配准图像,处理过程较为复杂。基于宽角度幅度特征的参数化成像方法需要连续观测的宽角度数据,且对于目标信号的信杂比要求较高,表1给出了不同成像方法的效果对比分析。
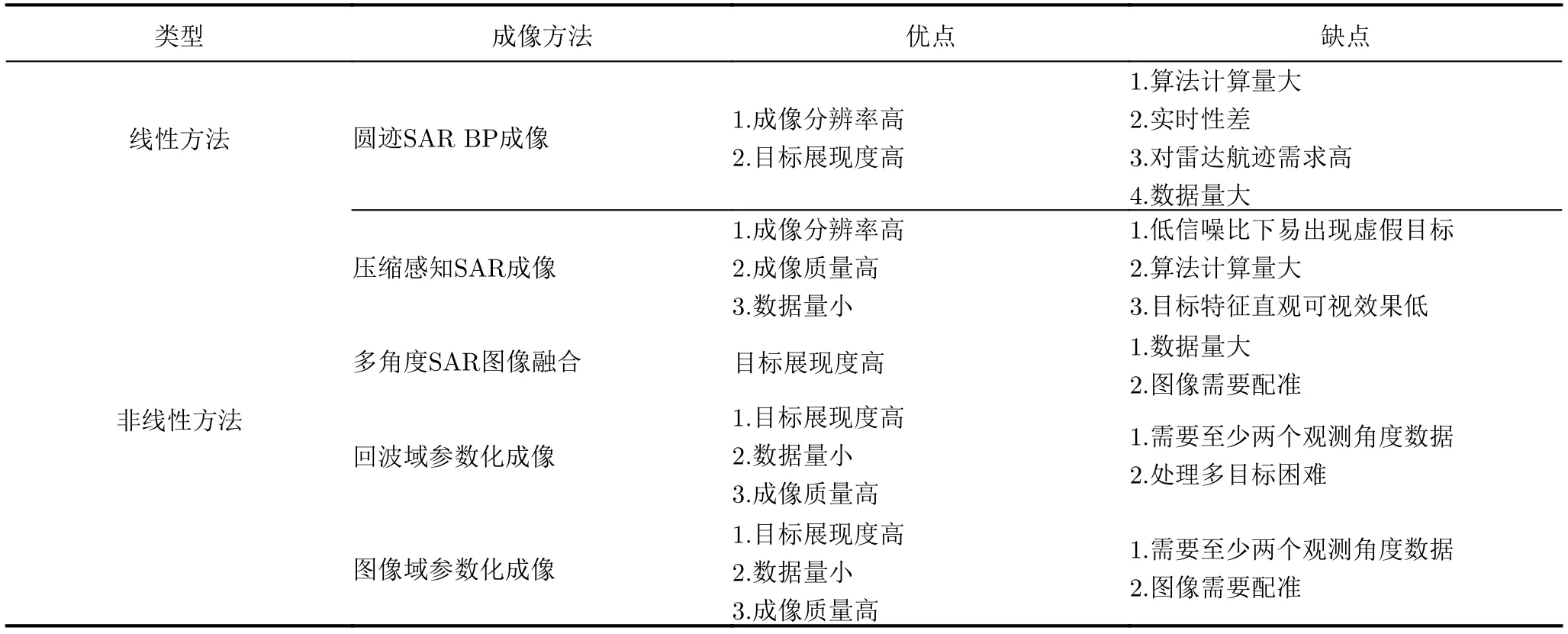
表1 不同成像方法效果对比分析Tab.1 Analysis of the effects of different imaging methods
4 结束语
实验结果表明,相比于传统的SAR成像方法,参数化成像方法一定程度上可在SAR图像中重建铲车铲斗、铁栏杆等直线型结构的几何特征,从而将雷达回波中一些非直观性回波域信息以直观的图像形式展示出来,这对于提升SAR图像的可读性具有很大的潜力。目前,参数化成像方法主要针对一些结构较为简单的人造目标,对于实际场景中更加复杂目标的研究还在进行中。合成孔径雷达参数化成像方法是雷达成像领域极具潜力的研究方向之一,其研究有助于提升SAR图像的可解释性,为进一步提升雷达目标识别、信息解译提供有力的保障。近年来,随着SAR智能化成像技术的发展和相关基础硬件水平性能的提升,SAR成像系统正朝着智能化、多源、多维度、多融合等方向发展。SAR的参数化成像方法与上述新技术相结合具有很大的提升与应用潜力。目前对于SAR参数化成像技术研究,依然存在很多待解决的问题,根据目前的研究进展,预计未来将在以下方面展开有序深入的研究。
(1)复杂场景多目标参量化成像。基于简单结构的参量化散射模型已经得到大量研究,但对于含有复杂目标的真实场景,其参量化成像不能仅仅考虑单个简单目标的电磁散射特性,还需考虑多种散射结构的组合以及环境背景和目标之间的耦合,因此需建立完备的参量化模型,清晰、准确地描述复杂目标的几何、材料等物理特性。今后对于复杂场景中的多目标参量化成像研究的重点一方面是完善复杂几何体散射模型,因为现有的典型几何体的散射模型远远不够;另一方面,为了参量化方法的实际应用,需要构建出准确度高、物理参数清晰、简洁性好、实用性强的复杂场景多目标参量化模型。
(2)智能SAR参量化成像。现阶段,线性处理已经无法解决SAR成像中的诸多难题。非线性处理方法不断受到研究者的青睐,正如本文所介绍的合成孔径雷达参数化成像。但非线性处理方法存在建模难、复杂度高和求解难的问题。幸运的是,神经网络在理论上拥有拟合任何非线性映射的能力,因而有望通过神经网络构建SAR回波数据到SAR图像的“智能非线性映射”。但现阶段,若通过海量数据直接训练神经网络,来得到如传统匹配滤波成像算法般“通用的”SAR成像智能网络,还存在很大的难度。其主要原因在于SAR数据的稀缺性、SAR成像系统与成像模型的复杂性和网络的不可解释性。因此,若想解决SAR智能化成像难题,需要解构SAR成像难题,从最基本的散射单元入手,依赖智能化网络提取有限的基本单元的深层可解释特征,通过有限基本单元的组合来解耦无限的组合,从而得到通用性的可解释性SAR智能成像网络。
猜你喜欢
车主之友(2022年4期)2022-11-25
军民两用技术与产品(2022年5期)2022-06-28
国际太空(2021年11期)2022-01-19
语数外学习·高中版中旬(2020年8期)2020-09-10
中学生数理化·教与学(2019年8期)2019-09-18
地理教育(2019年1期)2019-03-06
数学大王·中高年级(2018年7期)2018-08-29
中国化妆品(2017年12期)2017-06-27
小学生导刊(高年级)(2016年11期)2016-11-14
小哥白尼·军事科学画报(2009年4期)2009-05-11