手扶式三岔条带中耕施肥机的设计与仿真
2021-07-03 02:51刘宇轩高志勇顿国强毛宁魏斌郑琛达
农业装备与车辆工程 2021年6期
刘宇轩,高志勇,顿国强,毛宁,魏斌,郑琛达
(1.150040 黑龙江省 哈尔滨市 东北林业大学 机电工程学院;2.150040 黑龙江省 哈尔滨市 东北林业大学 工程技术学院)
0 引言
中耕施肥是农作物丰收的重要保障,不均匀施肥会影响农作物根系的养分吸收,造成作物生长不均减产的现象,不利于精准农业可持续发展[1]。目前,垄间施肥多采用条施或穴施,这种施肥方法肥料集中,肥料作用范围小,不易被作物吸收利用,大大降低了肥效并造成浪费[2]。
国内对中耕机械的研究主要针对集深松、施肥、除草、培土等多项作业为一体的大型机械,少有小型中耕施肥机械的研究。杨洲[3]等针对香蕉根系的分布特征进行统计分析,获得了基于根系分布特征的施肥决策;李明金[4]等设计了宽幅动力式中耕施肥机,填补了玉米大垄双行动力式中耕施肥机械的空白;孙鹏[5]等针对丘陵地形复杂的特点,在传统中耕机的基础上对马铃薯中耕机进行改进设计,降低了必要劳动时间。目前,国内施肥机器主要包括依靠重力自然下落式施肥机和依靠离心力撒播式施肥机。依靠重力自然下落式施肥机连接在排肥器下方,仅依靠一根管道输送肥料,下落肥料呈一条直线,肥料作用面积小。依靠离心力撒播式施肥机需要外部额外动力源,能源消耗大。此外,虽然此撒播方式的肥料为一扇形面,但是由于肥料颗粒的排出量不稳定造成离心作用效果不同,造成肥料分布不均匀。
针对上述问题,本文设计了针对垄作作物的三岔条带中耕施肥机,可将肥料沿垄侧到垄沟方向以逐渐增多的方式进行施肥作业,以保证作物正常生长的养分需要,并利用EDEM 对施肥作业过程进行仿真,验证机器的作业性能,以期为小型中耕施肥机的设计和应用提供参考。
1 施肥机的结构与原理
手扶式三岔条带中耕施肥机由机架、地轮、扶手、排肥器、三岔条带排肥管、传动链条等组成,如图1 所示。整机采用手扶式机构,工作时,由人工手扶机器沿垄沟方向前进,前地轮旋转通过传动链条带动间隙啮合排肥齿轮旋转,将肥箱里的肥料排出,并由三岔排肥管的二次分流装置将肥料撒播到垄两侧和垄底,撒播的肥料集线成面,保证中耕后作物生长的肥料需求。
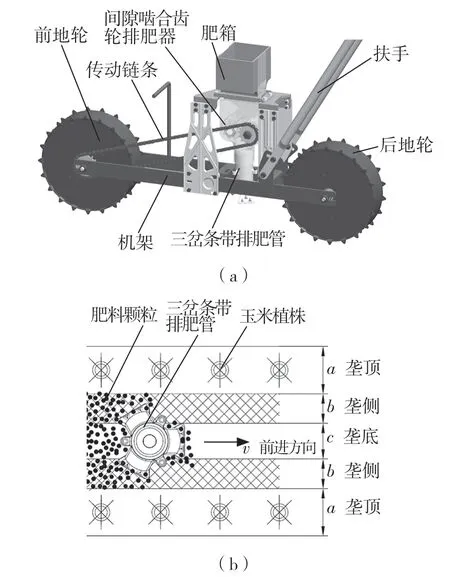
图1 手扶式三岔条带中耕施肥机整机结构与原理Fig.1 Structure and principle of walk-behind threechamber strip cultivating fertilizer applicator
1.1 排肥器的结构与原理
间隙啮合齿轮排肥器[6]由肥盒、间隙啮合排肥齿轮、挡肥板等构成。其中,间隙啮合排肥齿轮是排肥器的关键零件。
排肥器的工作原理如图2 所示。在传动齿轮轴的带动下,两个间隙啮合排肥齿轮向内部转动,肥箱下部的肥料随排肥轮转动并随着齿脊与齿槽间形成的容肥空间向下运动,落入排肥口,由于间隙啮合排肥齿轮的齿脊与齿槽连续交替啮合作用,排肥齿轮啮合的容肥空间大小基本不变,肥料颗粒连续稳定地排出,提高了排肥流量的均匀性,避免了外槽轮式排肥器的间歇性排肥的问题。

图2 间隙啮合齿轮排肥器Fig.2 Clearance meshing gear fertilizer distributor
1.2 三岔条带排肥管的结构与原理
三岔条带排肥管主要包括圆形漏斗、上圆柱肥管、分肥圆锥、下三岔圆柱管和带有分肥棱锥的分肥小板,如图3 所示。

图3 三岔条带排肥管的结构Fig.3 Structure of three-chamber strip fertilizer pipe
排肥管作业时,肥料由于重力下落,经过圆形漏斗收集作用的肥料均匀地被分肥圆锥分配到3 个呈120°圆周均匀分布的上排肥管道中;肥料经上排肥管道和下排肥管道落到分肥小板上;肥料经过分肥小板上的3 个分肥棱锥再次分开,每个管道下落的肥料经过二次分流;两侧管道下落的肥料分别落在两垄侧,保证作物前期的肥料需求;中间管道下落的肥料落在垄沟底部,保证了作物后期的肥料需求。整个垄侧及垄沟均匀撒施肥料,在施肥机带动三岔条带排肥管的匀速直线运动中,肥料撒播集线成面,实现其增大施肥面积及提高肥料分布均匀性的目的。
如图4 所示,不考虑三岔条带排肥管的移动(即作业速度为0)时,由于重力作用肥料经过倾角为θ的分肥小板后做抛物线运动,取其中一个肥料颗粒1 分析:设肥料颗粒刚滑出分肥小板时离地面高度为h,瞬时速度为v,将v 分解为水平速度vx和竖直速度vy,由几何关系可知


图4 三岔条带排肥管排肥原理Fig.4 Principle of fertilization with three-chamber strip fertilizer pipe
不考虑各种阻力,肥料颗粒将在水平方向作速度为vx的匀速直线运动,在竖直方向作初速度为vy,加速度为g 的匀加速直线运动,从而有

结合式(1)-式(4),消去t,得到肥料颗粒的水平分位移为

式中:v——肥料颗粒刚滑出分肥小板时的瞬时速度,m/s;θ——分肥小板与水平方向所成的倾角,°;h——肥料颗粒刚滑出分肥小板时离地面的高度,m;l——肥料颗粒刚滑出分肥小板时到落地的水平位移,m;t——肥料颗粒刚滑出分肥小板到落到地面的总时间,s;g——重力加速度,m/s2。
由式(5)可知,肥料颗粒刚滑出分肥小板时到落地的水平位移与肥料颗粒刚滑出分肥小板时的瞬时速度v、分肥小板与水平方向所成的倾角θ、肥料颗粒刚滑出分肥小板时离地面的高度h 有关,而因素θ和h 都是安装参数,由于肥料颗粒的大小不同,在分肥小板滑动的时间不同,导致肥料颗粒刚滑出分肥小板时的瞬时速度v 不尽相同,从而形成不同水平位移的肥料作用线,施肥机工作时,带动肥料撒播成面,从3 个呈120°分布的下排肥管道落出的肥料撒播成面,从而实现设计要求。
2 施肥作业过程的仿真
为验证所设计的三岔条带排肥管的作业性能,模拟实际状态下的施肥作业,采用离散元仿真软件EDEM(Engineering Discrete Element Method)进行施肥作业过程的仿真,其可以有效模拟实际施肥作业过程,评价其作业性能,加快施肥机械的研发进度。
2.1 离散元模型的建立与仿真
由于肥料颗粒间没有粘结力且流动性好,采用Hertz-Mindlin (no slip)模型作为仿真的接触模型[7]。从尿素化肥中随机抽取100 粒,经统计计算,单粒尿素等效直径为2.54 mm,密度为1 283 g/mm3。在EDEM 颗粒工厂中,设置Particle 平均半径为1.27 mm。本研究选用球形颗粒模拟田间土壤颗粒,EDEM 仿真中颗粒数目的增加和尺寸的减小会导致仿真耗时和存储空间呈几何级数增加,故仿真中的颗粒尺寸受计算时间和存储空间的限制,总是比真实土壤尺寸大[8]。本研究选取土壤颗粒半径5 mm,符合仿真试验要求。
其他参数如颗粒属性参数和接触参数[9-12]如表1 所示。
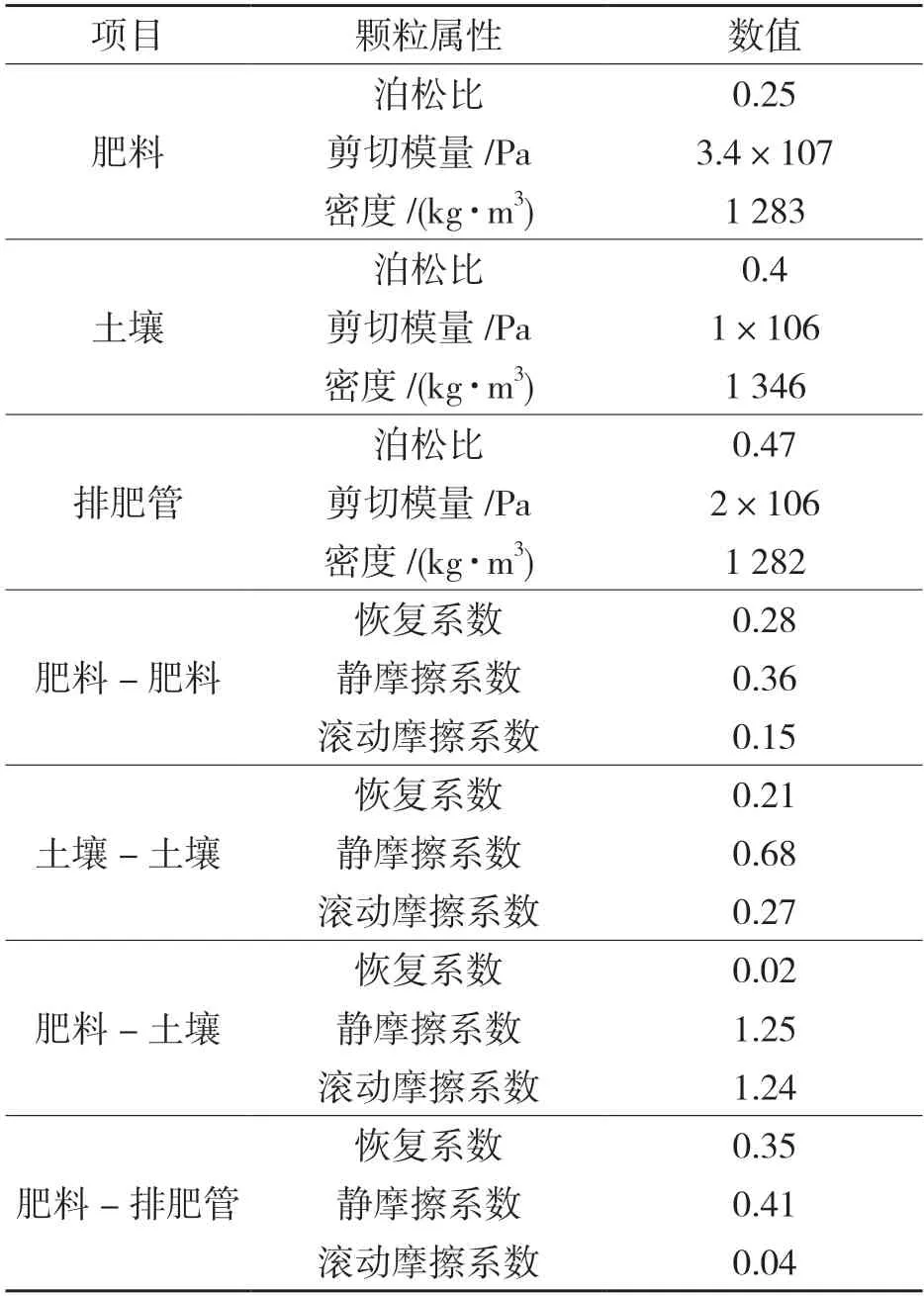
表1 EDEM 仿真中的变量参数设置Tab.1 Variable parameter setting in EDEM simulation
使用SolidWorks 进行三岔条带排肥管三维模型的建立。根据垄作作物玉米实际的耕种方式,建立梯形田垄土壤床[13],垄距为60 cm,株距为25 cm。在EDEM 中导入三维模型文件,并进行模型零件参数设置。为三岔条带排肥管设置前进速度0.5 m/s 模拟手扶施肥机的前进速度,此外为获得肥料分布数据,在排肥管作业区域设置125 mm×75 mm×530 mm(长×宽×高)的检测网格96 个,仿真示意如图5 所示。

图5 EDEM 仿真示意图Fig.5 EDEM simulation diagram
2.2 施肥作业效果及分析
为监测排肥作业的稳定性和分布均匀性,在EDEM 后处理中导出X 范围为0~600 mm,Y 范围为0~750 mm,共48 个网格中肥料颗粒的坐标位置分布,如图6 所示。选取垄侧(X=75~225 mm和X=375~525 mm)和垄底(X=225~375 mm)部分网格内颗粒数量,计算Y 轴方向肥料颗粒数量分布变异系数,如表2 所示。经过计算,Y 轴方向的颗粒肥料数量分布平均变异系数为0.077,满足设计要求。

图6 肥料颗粒坐标图Fig.6 Fertilizer particles plots

表2 垄侧和垄沟部分Y 轴方向肥料颗粒数量分布Tab.2 Distribution of fertilizer particles in Y-axis direction of ridge side and ditch part
由图6 和表2 可以看出,垄顶植株根系(X=0~75 mm 和X=525~600 mm)处肥料颗粒数量几乎为0,避免了苗幼期烧苗现象。垄沟两侧(X=75~225 mm 和X=375~525 mm)处和垄沟底部(X=225~375 mm)处在Y轴方向(机器前进方向)上均匀分布,避免了作物生长不均导致的减产。在X 轴方向呈现垄沟两侧少、垄沟底部多的分布趋势,肥料数量近似呈抛物线状分布,与实际情况相符。垄侧肥料较少,可以满足中耕后拔苗期的养分需求,垄底肥料较多,可以满足中耕后根系生长和开花期的养分需求。
3 结论
(1)设计了一种手扶式三岔条带中耕施肥机,采用间隙啮合圆弧齿轮排肥器和三岔条带排肥管,进一步提高了从排肥到落肥过程中肥料分布的均匀性。
(2)利用EDEM 进行三岔条带排肥管的排肥作业仿真,通过检测网格输出肥料颗粒位置分布和数量分布,结果显示:垄顶植株根系处肥料颗粒数量几乎为0,垄沟两侧处和垄沟底部处在Y 轴方向上均匀分布,分布变异系数平均值为0.077;在X 轴方向呈现垄沟两侧少、垄沟底部多的分布趋势,可满足中耕后作物生长的养分需求。
(3)EDEM 仿真结果符合实际施肥情况,利用离散元法来模拟施肥作业是可靠的。
猜你喜欢
新疆农机化(2022年5期)2022-09-21
计算机应用与软件(2022年6期)2022-07-12
油气地质与采收率(2022年3期)2022-05-20
自然灾害学报(2022年2期)2022-05-10
现代农机(2021年4期)2021-12-04
华北农学报(2021年5期)2021-11-01
中国学校体育(2021年10期)2021-04-26
农技服务(2020年12期)2020-12-17
新农业(2019年11期)2019-11-23
农业与技术(2017年9期)2017-05-28