高分多模卫星飞行程序设计及验证
2021-07-03 02:32姜洋于龙江王跃杨文涛范立佳
航天器工程 2021年3期
姜洋 于龙江 王跃 杨文涛 范立佳
(中国空间技术研究院遥感卫星总体部,北京 100094)
卫星的飞行程序规定卫星从发射前在发射工位上卫星初始状态的设置、临射前状态检查、运载火箭发射、卫星入轨、正常运行状态建立到整星在轨交付前的主要程序和正常飞行阶段的工作程序[1]。并且会详细分解从入轨飞行到高精度对地姿态建立整个过程中的卫星动作、地面指令操作程序及指令执行判据,制定初轨调整策略和在轨测试中的主要内容和基本流程。飞行程序是卫星入轨初期工作的指导文件,对卫星任务完成具有重要作用。
飞行程序根据卫星的功能、特点以及验证需求,设计工作流程及工作事件,继承常规设计经验并根据卫星特点开展针对性的设计,二者有机结合。高分多模卫星(GFDM-1)是一颗敏捷卫星,具备新型成像模式[2],卫星工作模式复杂姿态机动频繁,具备自主任务管理和自主健康管理的智能处理能力,采用5级的星地任务管理体系完成载荷任务,通过“元任务”方式上注地面任务,飞控操作与以往卫星不同。
太阳翼、天线等挠性附件对卫星敏捷性能有很大的影响,传统卫星太阳翼在轨展开刚度较低[3-4],展开状态的基频通常不超过1 Hz,难以满足敏捷卫星快速姿态机动、快速稳定的任务需求[5]。太阳翼采用了新型并联式结构的高刚度太阳翼,其展开方式为二次展开,且太阳翼是关乎卫星安全的重要单机,所以在飞行程序中确保其顺利展开并捕获太阳是一个关键。另外,敏捷卫星相对于传统的三轴对地工作卫星在状态建立阶段和载荷任务执行阶段,卫星姿态的敏捷机动会对测控、数传、导航的使用带来影响,需要在程序设计时综合分析保证时序合理。高分多模卫星具备多模式高密度的图像获取能力,需要根据星上自主任务的管理和约束,采用星地一体的任务规划的体系来设计和安排在轨任务。
本文对高分多模卫星的飞行程序进行介绍,重点针对入轨段程序和任务模式中复杂工作状态组合和约束条件下的飞行程序综合优化设计进行说明,并通过在轨应用效果对飞行程序的合理性和有效性进行验证。
1 飞行程序设计
1.1 设计原则
飞行程序设计原则有一些通用性,同时也要根据卫星自身特点进行特殊考虑[6]。高分多模卫星的飞行程序设计原则主要有以下几点。
1)关键事件保障
关系卫星安全和功能的关键事件,要合理采用程控/遥控指令、双机备份、直接/间接指令备份等多种执行方式重点保障,同时要做好故障预案以及预留故障处置时间,必要时安排中继测控弧段提供操作时间保障。
2)优化时序
根据事件的重要程度,预估操作执行和监视状态的时间,综合考虑快速性和可靠性,合理设置事件的串行和并行时序、综合运用元任务、指令序列、子任务三种执行方式,提高效率。
3)预先规划
卫星具备自主任务管理能力,采用天地一体的任务管理方式,地面提前进行轨道、姿态、能源、固存容量、天气情况等综合约束仿真,确保测试任务的可行性,提高图像获取率。
4)模式覆盖
敏捷成像模式有5种,数传方式有对地、对中继两种且码速率各有3种,此外还有星上任务规划和星上区域提取与处理等模式,遵循从简到繁的测试顺序,同时考虑覆盖和重点测试兼顾的综合原则。
1.2 飞行事件和任务设计
高分多模卫星的载荷配置多样,除主载荷高分相机外,还有大气同步校正仪、区域提取与处理单元、激光通信终端等,具备5种敏捷成像模式;通信和数据传输链路多样,含对地测控、中继测控、对地数传和中继数传且码速率多达6种;需要火工解锁的设备7台,转动部件众多,卫星系统状态建立和载荷任务复杂且工作量大,所以在确保可靠的同时快速状态建立面临着很大的困难。
高分多模卫星飞行程序设计时,充分考虑卫星的能力,简化地面操作:在主动段地面不发送指令,采用延时指令方式进行力学采集和监视相机采集;在星箭分离阶段,以星上的程控指令组完成推进加电和太阳翼火工品解锁及展开等关键动作,地面上注作为备份手段;在状态建立阶段,考虑应用需求采用指令序列、子任务、数据块等多种形式合理安排,简化操作流程;载荷任务阶段,使用面向用户的自主任务管理方式,提前规划并上注元任务,简化了星地接口,减少了上行链路的数据量和操作复杂度。整个飞控期间的主要事件和任务如图1所示。

图1 飞控期间的主要事件Fig.1 Major operations in flight control
针对第1圈太阳翼展开、第2圈的新研关键单机控制力矩陀螺启动过程、高精度姿态测量状态建立等关键事件节点,使用了中继测控弧段用于监视和故障应对,确保可靠性;在4圈和6圈,完成天线复位、姿态机动、载荷初始状态检查等重要功能测试,确保了第7圈北京站双天线对地传输链路打通,具备载荷任务状态,提升了状态建立的快速性。此外,在整个状态建立过程中,精细化分析指令执行时间,对于天线展开、复位、激光转动、姿态机动等耗时的动作,采用事件并行设计同时优化串行指令时序,合理的缩减总流程时间;充分利用北京站的一次过境数传弧段,根据天线仰角使用约束结合自主任务时序要求,一次过境完成两个天线数传链路测试,为后续高分相机高频次任务大数据量传输奠定了基础。
第1天,完成测控通道、数据管理、电源供给、高精度姿态控制、数传通道等平台状态建立和载荷初始状态确认工作;第2天,进行多次相机调焦操作,初步确定焦面位置;第3天,开展载荷工作模式验证,此后持续开展成像、回放和图像实时处理功能测试;第4天,制定轨控方案并开展轨道调整工作、开展区域提取与处理功能验证;第5天,开展星上自主任务规划和大气同步校正仪定标测试;第6、7天,开展中继数传链路打通,完成三种码速率的传输功能验证。最后,按照卫星在轨运行需求进行整星状态设置,移交到长期运行管理部门。
2 关键复杂飞行事件识别与设计
针对高分多模卫星的设计特点和事件执行过程进行分析,识别本型号新动作和新状态,尤其是针对敏捷特性耦合下的事件重点关注。
1)太阳翼展开与捕获跟踪太阳
和传统三轴对地卫星相比,为减少机动过程的帆板挠性影响,配置高刚度的并联式太阳翼,其展开过程相对复杂。太阳翼展开、捕获、跟踪是能源状态建立的关键。
2)惯性定向模式下的中继传输模式规划
敏捷卫星的姿态机动频繁,对测控和数传的使用存在约束,对于惯性定向模式下的中继数传测试尤其明显,姿态、测控和数传时变约束复杂且工况持续时间长。
3)多模式高频次任务设计与规划
首次采用以元任务为星地接口的天地一体的自主任务管理方案,星上可以实现任务解析、子任务分解、大指令、指令序列的生成和发送,地面需要先开展预先规划工作,确保多模式高频度任务安排合理可行。
2.1 太阳翼展开与捕获跟踪太阳
高分多模卫星采用并联式的太阳翼,在轨通过二次展开锁定到正常工作状态,太阳翼展开及跟踪是整星能源供给的重要步骤,在飞行程序设计前对太阳翼的展开过程进行了力学响应、跟踪过程和指令时序等全面分析。
基于Adams软件建立太阳翼展开过程动力学分析模型,在飞行程序设计前对展开过程的冲击情况进行了仿真。太阳翼展开过程及帆板冲击转角如图2、图3所示。根据理论发射轨道参数、太阳翼冲击响应结果结合捕获策略分析太阳翼捕获时间和太阳翼电流的变化情况,整个过程是建立能源状态的重要环节。

图2 太阳翼二维展开过程Fig.2 Two-dimensional deployment process of solar panel

图3 SADA转动角度-时间曲线Fig.3 Angle-time curve of SADA rotation
经过对太阳翼展开冲击、捕获跟踪过程和对地、中继测控弧段的综合分析,表明太阳翼展开过程的冲击导致太阳翼转动60°左右,此状态下按照太阳翼控制策略分析两翼捕获过程会持续约410 s,需要对地和中继测控联合保障。依据分析结果,细化发射入轨首圈的正常事件时序和预案执行时机和时序,分配对地和中继测控弧段使用需求,确定在对地弧段的指令序列及紧急故障处置序列,中继弧段用于监视太阳翼的捕获跟踪过程,同时也为故障处置预留了时间,为飞控关键事件提供保障。
2.2 惯性定向下的中继传输模式规划
高分多模卫星是具备中继传输功能的民用卫星,实现军民融合应用需求。在进行中继信标校准的过程要对接收机的像移值进行遍历,需要中继回放模式持续30 min。考虑满足敏捷卫星布局要求充分利用卫星的敏捷特性,中继数据回放模式采用惯性定向模式,卫星姿态机动范围很大且对地持续改变,仅用单一对地测控只有10 min测控弧段无法满足需求,若采用延时下传则时效性差,参数解算会延时一轨,信标校准的串行测试耗时增加2轨时间。综合优化采用中继测控方式,全程下传实时遥测数据,以能够在当圈快速完成数据分析和参数解算。在测试设计中要考虑多方面需求,需要在姿态机动约束下,再将测控和数传需求进行联合迭代仿真。利用任务规划软件和STK仿真软件进行建模,综合考虑惯性姿态、测控天线、中继数传天线的安装位置、天线方向图、天线波束角约束,结合轨道信息找到中继测控可见且中继数传的时长30 min左右弧段。仿真过程如图4所示。

图4 多约束条件的中继数传联合仿真流程Fig.4 Data relay transmission simulation process in multiple constraints
经过迭代仿真分析,优化后的中继任务规划结果如表1所示,表中的q1~q4表示卫星姿态四元数。

表1 中继数传任务规划结果Table 1 Mission planning of data relay transmission
2.3 多模式高频度载荷任务规划
高分多模卫星具备一轨内密集成像能力,相比以往大中型遥感卫星提高至少5倍;可实现多点目标、区域拼幅、主动推扫、立体、多角度等多种敏捷成像模式[7]和对地、对中继的多种数传模式,大幅提高了卫星有效图像的获取效率和应用价值。高分多模卫星首次采用了基于元任务的自主任务管理方式,大大简化了复杂模式大任务量的星地接口,减轻了上行链路的压力,上注包含目标的地理位置、成像相关参数信息的元任务,直接面向用户需求,由星上自主完成任务准备和执行阶段的姿态规划、指令序列的解析和积分时间计算等,实现了图像的精准获取。
任务的规划和执行是在星地一体化框架下的任务系统内实现,为保证任务的有效、合理和正确性,在地面构建了多种模式的任务规划模型形成地面任务规划仿真系统,对任务阶段的姿态、轨道、固存状态、能源平衡、积分时间等任务参数进行了全面仿真分析,提前直观清晰展示任务准备、执行和恢复状态过程,为飞控期间的任务设计提供了保障。任务仿真结果见图5。
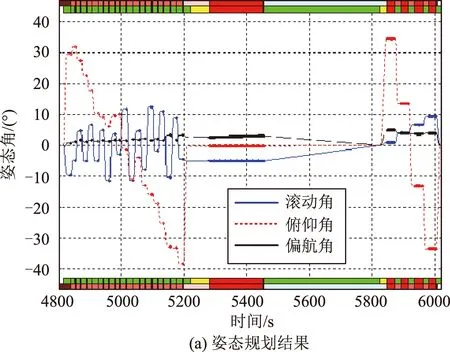
图5 任务规划仿真结果(示例)Fig.5 Simulation results of mission planning(examples)
3 飞控预案设计
针对高分多模卫星飞行程序中的发射及入轨的各项事件进行梳理,明确操作流程和关注的重点,从薄弱环节和故障模式等综合分析可能出现的各种故障情况并制定故障处置预案,其中影响卫星安全和任务的故障及应对预案共计33项,具体详见表2。其中,针对太阳翼展开故障设计了姿态抖动、-Y/+Y对日定向的处置策略;针对卫星未进入预定轨道,对轨道高度和姿态开展了多种情况分析,制定了对应的抢救时机和策略;其他故障可以通过设备备份、通道备份、系统重构、备份指令等方式进行处置。飞控预案项目覆盖了飞控重点圈次的全部事件,处置措施合理可行。

表2 飞控期间重要故障事件Table 2 Important fault event during flight control period
4 飞行程序及预案地面测试验证
在整星测试期间,依据飞行程序进行了模式测试,对射前3 h的状态设置、入轨段状态建立、载荷调试和模式测试事件和动作时序开展了全面测试,测试结果正常,具体测试项目见表3。经过测试,进一步固化了飞控流程、指令序列、数据块和指令时序,为后续的飞控实施奠定了基础。

表3 飞行程序模飞测试Fig.3 Flight simulating test of flight program
在高分多模卫星的分系统功能性能测试阶段和整星故障模式模飞测试中,对飞控预案进行了测试。采用地面模拟故障或是遥控注入的方式模拟在轨故障,按照预案卡进行故障处置措施的测试验证。对于无法模拟的故障开展分析,对指令和时序进行了验证,飞控故障预案地面验证充分。
5 飞行程序在轨应用及验证
高分多模卫星2020年7月3日发射入轨,按照制定的飞行程序开展飞控工作,飞行事件和指令均执行正常。在主动段、星箭分离和入轨初期,顺利完成了能源、测控、控制、热控、数传等状态建立,各载荷相继开机工作,覆盖了全部的敏捷成像模式和数传模式。经过7天的飞控测试,建立了卫星平台工作状态,对载荷设备进行了调试和初步测试验证,表明卫星工作正常,在轨运行稳定。最后,根据卫星长期在轨运行需求完成了系统状态设置,交付到在轨长期运行管理部门。
5.1 太阳翼展开及捕获跟踪太阳
星箭分离后按照程控完成太阳翼火工品电爆解锁,两翼经过一次、二次展开后完全展开并锁定,展开过程用时为19 s。星箭分离120 s后太阳翼驱动机构以-0.6(°)/s转动,控制太阳翼开始捕获太阳,到位后自动转入跟踪状态,太阳翼转角转动与仿真结果一致。在捕获跟踪过程中,两翼太阳电池阵电流逐渐增大到约43 A,具体电流遥测曲线如图6所示。太阳翼展开、捕获和跟踪过程正常,能源状态建立正常。
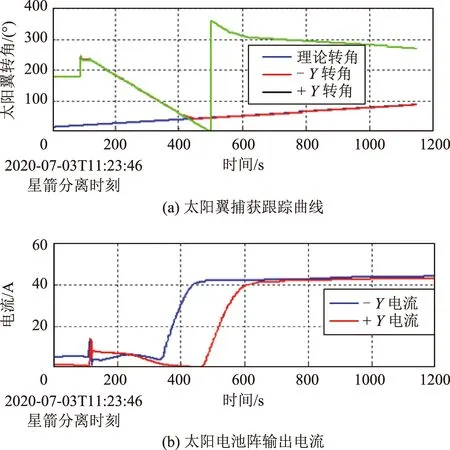
图6 入轨后太阳翼转动及输出电流曲线Fig.6 Curves of rotation and output current of solar array on orbit
5.2 惯性定向下的中继传输模式验证
经过任务规划与STK的迭代仿真,最终选取了惯性姿态下满足中继测控和中继数传需求的多个任务时段并生成了中继回放元任务,先后开展中继信标校准和数据传输任务。
在中继信标相位校准过程中,提前上注中继传输元任务、Ka频段跟踪接收机的调相序列和天线跟踪控制模式切换序列,通过遥测观察不同状态下方位差和俯仰差的变化情况,分析确定跟踪接收机的相移值。中继传输任务规划合理,经过粗精校准两次任务,利用2轨时间完成了中继信标校准工作,提升了飞控工作效率,为后续的中继任务奠定了基础。
在中继信标相位校准完成后,开展了3种码速率的中继数据传输测试。中继数传过程中,整星处于惯性定向模式,对地姿态持续变化的状态下中继通道遥测连续,为及时判读提供了基础保障。所有中继任务均正确执行,姿态控制正确,中继天线跟踪中继星正常,数据传输无误码,顺利完成了中继数传功能验证。中继数传过程的姿态和天线跟踪情况见图7。

图7 中继传输过程姿态和天线跟踪曲线Fig.7 Curves of attitude and antenna angles in data relay transmission
5.3 多模式高频度的载荷工作模式验证
卫星入轨前7圈按照预定飞行程序完成了平台状态建立。从第2天到第7天开展了载荷调试、定标和高密度的点目标、区域拼幅、主动成像、立体成像和多角度成像模式、对地数传和中继数传模式的验证,共计成像277次,回放55次,具体项目如表4所示。所有任务时序安排合理,无冲突和无效情况,星地任务规划设计正确,实现了基于元任务的载荷任务管理功能测试验证,所有任务执行正确。

表4 飞控期间的任务统计Table 4 Mission statistics tasks in flight control period
飞控期间按照每天工作10轨来进行任务安排,覆盖各种模式组合。对于呼伦贝尔、越南东海岸、南沙区域、意大利、海南等不规则狭长地带,设计了主动推扫模式;台北、雅典、旧金山、尼亚加拉瀑布等设计了多角度成像模式,获取了标志性地标建筑的细节图像,对于北京、罗马、关岛等城市区域,设计了同轨拼幅模式,一次过境获取全局图像,对于零散分布的小型目标,采用同轨多点目标成像模式,增加获得的精细目标数量和有效数据。回放模式覆盖了对地双天线的传输通道,中继传输的3种码速率。在整个飞控期间覆盖了全部成像和回放模式,图像获取效率和数量较以往在轨卫星大幅度提升,充分利用模式的特点和优势,获取了多种类型的典型图像,取得了良好的观测效果。
6 结束语
本文梳理了高分多模的特点,分析飞控工作的重点和难点,对事件的顺序和指令的编排进行优化,设计并制定了飞控操作程序。识别飞行程序中太阳翼展开及捕获跟踪、多模式高频度的载荷任务规划、中继数传模式等关键复杂事件进行设计并开展地面仿真,全面分析在轨状态、对多约束耦合状态仿真优化。卫星发射及入轨,按照预定程序进行飞控实施,经过7天的飞控工作,实现了复杂平台的快速状态建立,完成了载荷调试、载荷工作模式和功能验证,圆满完成了飞控任务,为后续的在轨全面测试奠定基础。高分多模卫星在轨飞控结果表明:卫星平台和载荷单机工作正常,卫星系统状态建立正确且运行稳定,各工作模式下图像质量良好,载荷数据传输正常,卫星具备长期稳定业务运行的能力。高分多模卫星状态建立和任务执行过程设计合理,可以为其他敏捷类卫星飞行程序设计提供参考。
猜你喜欢
振动与冲击(2022年19期)2022-10-17
航天标准化(2021年3期)2021-12-25
中国船检(2020年11期)2020-11-27
学苑创造·C版(2018年7期)2018-08-08
科学与技术(2018年23期)2018-06-17
上海师范大学学报·自然科学版(2018年2期)2018-05-14
电子技术与软件工程(2017年11期)2017-06-10
科技创新导报(2017年1期)2017-03-21