高分多模卫星星地任务管理方案设计与验证
2021-07-03 02:31于龙江汪精华赵思阳朱剑冰刘明亮
航天器工程 2021年3期
于龙江 汪精华 赵思阳 朱剑冰 刘明亮
(1 中国空间技术研究院遥感卫星总体部,北京 100094) (2 北京空间飞行器总体设计部,北京 100094)(3 中国资源卫星应用中心,北京 100094)
高分多模卫星是我国“十二五”期间全新一代中型敏捷遥感卫星公用平台的首发星,是一颗典型的敏捷高分辨率光学成像卫星。卫星在设计之初,充分继承并利用中型敏捷遥感卫星公用平台基础,面向应用需求设计了姿态机动速度达到25°/20 s和40°/25 s的快速姿态机动并稳定能力,以及同轨区域拼幅[1]、同轨多角度成像、同轨立体成像、主动推扫“动中成像”[2-3]等丰富的敏捷成像模式。同时,为满足遥感图像数据的快速回传要求,配置了多种传输手段,包括X频段极化复用对地数传系统、Ka频段中继数传系统及激光中继数传系统。
丰富、灵活的工作模式为卫星设计和应用带来了新的挑战,主要包括:成像与数传工作模式调动的星上设备操作多且复杂;面向具体应用的模式组合变化多,任务间的时间冲突和资源冲突需要规避;卫星单轨和1天内可执行任务数量大幅增加,对任务上注过程带来很大压力。这些问题不解决,将可能导致卫星虽然有单个的敏捷成像模式,但不易组合、不便使用,甚至由于地面操作的繁琐、对卫星安全性的过度保护,而不能充分发挥卫星能力。面对上述问题,文献[4]和文献[5]先后对法国敏捷光学成像卫星“昴宿星”(Pleiades)开展了日常任务规划与调度算法研究,成果应用于地面任务规划系统建设与应用;文献[6-8]中进一步发展了多种类型的任务规划算法。在国内,文献[9-10]中对小型敏捷卫星的任务规划系统、任务操控模式进行了研究,提出了基于星上资源模型的地面任务规划系统、基于星上指令解译的地面任务上注方案,并提出了用户只需要上注观测目标的地理位置和时间、由卫星自主完成任务操控的技术发展设想。
高分多模卫星在设计与研制过程中,借鉴国内外任务规划与管理技术发展经验,归纳整理了星地任务管理层次化逻辑架构,明确了卫星自主任务管理等级和星地任务接口形式,开发了对应的地面任务规划软件、星上自主任务管理软件,星地结合实现了复杂工作模式的灵活、高效应用。本文对高分多模卫星的星地任务管理方案设计要点、验证情况与应用效能进行了总结和介绍。
1 任务管理特点与需求分析
遥感卫星星地任务管理包括任务规划与任务执行2个环节。任务规划是指在综合考虑观测任务需求和卫星能力的基础上,将卫星资源分配给相互竞争的多个任务需求,确定任务所对应参数,排除任务间资源使用冲突,以最大程度满足用户需求的活动。任务规划的输出是卫星待执行的任务序列,即“卫星要做什么”。任务执行是指卫星接收到任务序列(或由其衍生的指令序列、任务表单等)信息后,解析并执行相应动作、从而完成任务序列中各个任务的活动;也包括卫星对任务是否可被执行、任务是否已被正确执行的信息整理和反馈活动。任务执行的输出是卫星将执行的具体动作序列,即“卫星要怎么做”。
高分多模卫星的任务管理相比传统遥感卫星具有以下特点。
(1)需要处理的成像需求更加灵活多样。卫星成像模式丰富,用户也会提出多样化和精细化的观测需求。观测需求要素包括目标地理信息、观测时效、图像品质、成像模式、紧急程度等。在多用户共同使用卫星的情况下,各类观测需求数量很大、类型庞杂,为任务规划过程带来挑战。
(2)任务规划技术更为复杂,精细化程度要求更高。卫星执行单次成像任务的方式非常灵活,前后相邻成像的间隔可以非常短。规划求解空间很大,但姿态路径规划复杂度提高,任务时序优化过程也更加复杂。因此,需要任务规划系统对卫星能力充分了解,也需要进行精确的约束检查后方可执行。约束检查工作如果只在地面开展,将存在一定风险,因此期望卫星上也能自主开展。
(3)卫星工作过程指令数据量大,需要星上自主任务管理能力增强。高分多模卫星相比传统遥感卫星,单位时间可执行的任务数量大幅提高。同时,主动推扫模式过程中和不同模式之间的切换过程中,卫星的姿态规划曲线需要用密集的数据点来描述。若采用传统的地面指令编排方式,将难以在有限的测控弧段内满足复杂任务上注的需求。因此,必须改变当前以指令序列为星地任务接口的方式,提高卫星对复杂工作模式的自主管理能力。
综上,高分多模卫星的任务管理,其难点既体现在任务规划和任务执行两部分工作各自的复杂程度,也包括如何将两部分工作合理分配给地面和卫星,从而实现操作简易度与工程难度之间的平衡。为此,本文提出了高分多模卫星星地任务管理方案设计,包括任务管理的分层架构和星上自主任务管理等级设计,以及地面段任务管理方案设计和星上自主任务管理方案设计。
2 任务管理分层架构设计
2.1 卫星任务分层描述方式
为了解决从地面到卫星的全链路任务管理难点,需要对“任务”这一笼统的概念进行精确的解构和定义,将各个环节的工作内容、接口界面及相互关系表述清楚。按照由顶层到底层、由需求到实现的方式,将观测任务分解为5个层面,分别为:目标层、需求/任务层、元任务/条带层、动作层、指令层。参考观测任务的分层方式,可以类比设计出数据回传任务的分层方式。由此,得到高分多模卫星任务分层结构如图1所示,每层的信息有其自身特点和对应的描述方式。采用任务分层设计理念,可以为地面及卫星任务管理提供良好设计框架。

图1 任务分层描述方式Fig.1 Hierarchical description of task
(1)目标:指用户提出的地表观测对象,具有特定几何位置、形状、尺寸描述。观测目标形式和内容可能非常多样,尺度范围跨度也可能很大,例如小到某个建筑、大到某座城市。概括来说,观测目标可以分为点目标、区域目标和长条带目标3种,如图2所示。点目标是指卫星一次条带成像可以完全覆盖的目标,对应为地面上的一个小区域,采用中心点的经纬度坐标来描述。区域目标是指需要多个观测条带才能覆盖的面积较大的区域,目标边界由一系列首尾相连的点组成。长条带目标是指诸如边境线、海岸带等具有不规则形状的线形目标,由一系列中心点组成。
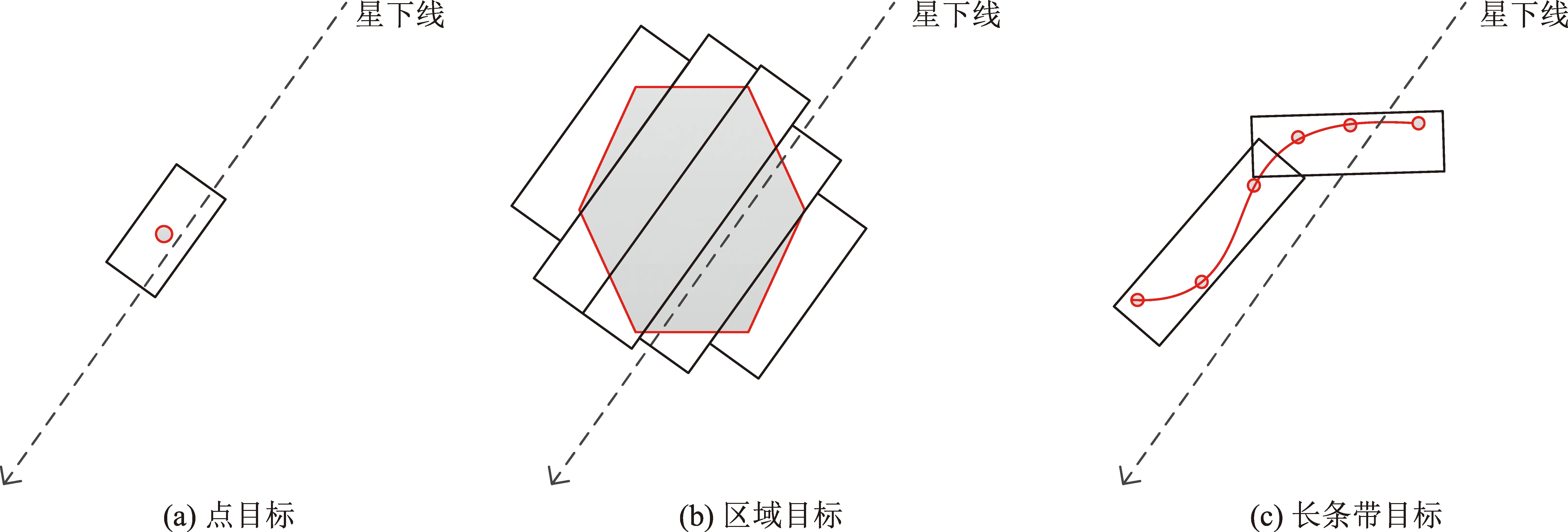
图2 不同类型观测目标示例Fig.2 Examples of different types of observation targets
(2)需求/任务:指用户在目标的基础上所提出的成像具体需求,包含成像模式(单视角、多视角、立体、主动等)、像质要求(分辨率等)、云量要求、时效性要求等。观测需求通常也称为观测任务。成像需求/数传需求是高分多模卫星任务规划系统的直接输入。任务规划系统设计时,需要尽量细致地刻画、描述需求的各个细节,定义需求的属性参数。成像需求(任务)的描述包括地理要求、时效要求、图像要求3个方面。地理要求包括目标类型及其具体位置、形状、尺寸描述;时效要求为完成成像的期限,对于不同紧急程度的成像任务,可以赋予不同级别的优先级;图像要求代表用户对图像质量的要求,包括成像模式/观测角度要求、分辨率要求、云量要求、像质综合要求等。数传需求(任务)的描述包括数据回传的期限要求、地面站/中继卫星要求等。某些用户会要求将特定的成像数据在特定时间段内传输至指定地面站,以方便接收和处理。
(3)元任务/条带:成像元任务是卫星一次成像过程可以完成的观测活动,是卫星可以执行的最小成像任务,图3展示了卫星一次对地成像的观测几何及相关参数;回放元任务是卫星一次回放过程可以完成的任务。高分多模卫星工作模式多样且组合应用方式复杂。在成像模式中,既有卫星姿态在轨道坐标系基本固定的被动推扫成像模式,也有卫星姿态在轨道坐标系“动中成像”的主动推扫成像模式。在回放模式中,既有单站回放、多站接力回放、边记边放等对地回放模式,也有星体姿态机动结合中继天线指向中继通信卫星的中继回放模式、激光通信试验模式。卫星的数据回放可能发生在成像之前、成像之后,甚至跨越一个或数个成像过程。基于上述考虑,提取各个模式的共性要素,设计成像元任务、回放元任务,使两类元任务可以分别独立执行,提高卫星执行任务的灵活性。高分多模卫星设计了5种具体的成像元任务,包括被动推扫成像元任务(指定目标条带位置、指定成像时星体姿态)、主动推扫成像元任务(匀地速、匀角速度、匀积分时间)。每种成像元任务的数据格式完全相同,包含任务圈编号、元任务序号、优先级、成像元任务类型、起始/结束成像时刻、起始点的经度/纬度(或起始点滚动角/俯仰角)、结束点的经度/纬度、成像参数等内容,实现对该成像元任务在时间、位置、姿态方面的全部限定。在回放元任务的数据格式中,包含任务圈编号、元任务序号、优先级、开始/结束传输时间、天线标志、天线控制模式、星体姿态、地面站标志、数据传输模式、传输数据数量/清单等内容,实现对该回放任务在时间、地面站、传输模式/内容等方面的全部限定。
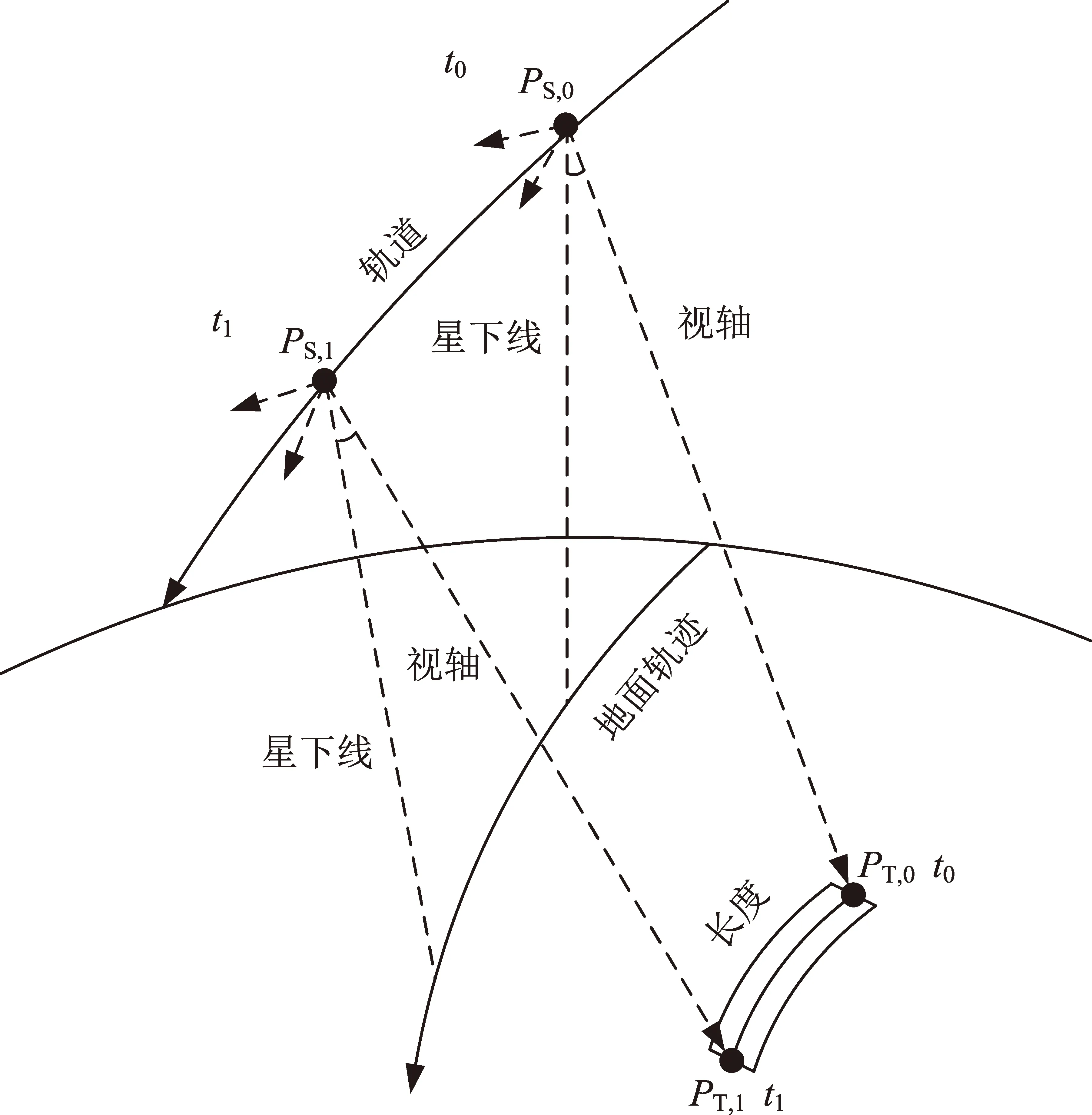
注:t0和t1分别为成像起始时刻和结束时刻;PT,0和PT,1分别为成像条带起点位置和终点位置;PS,0和PS,1分别为成像起始时刻和结束时刻的卫星位置。图3 卫星对地观测几何示意Fig.3 Satellite earth observation geometry
(4)动作:指卫星某个分系统、单机或功能模块完成的一次具体操作,包含时间信息,并按照时间排列。例如:光学相机的开机动作、成像动作、关机动作;数传分系统的加电动作、基带开机动作、数据记录动作、通道开机动作、数据传输动作。
(5)指令:是驱动动作执行的具体模拟或数字信号,通常由卫星的一级信息管理设备或二级信息管理设备发出。
2.2 星上任务管理自主程度等级
从卫星设计的角度来说,重点关注的是星上任务管理的自主性达到什么程度,需要在使用效果和工程难度之间进行平衡。基于任务分层框架,梳理常见的遥感卫星任务管理设计理念和方法,定义任务管理的自主程度等级,并明确高分多模卫星采用哪种程度的自主任务管理。
遥感卫星自主任务管理等级由低到高可以分为以下5种,5个层次对应的技术特征如表1所示。
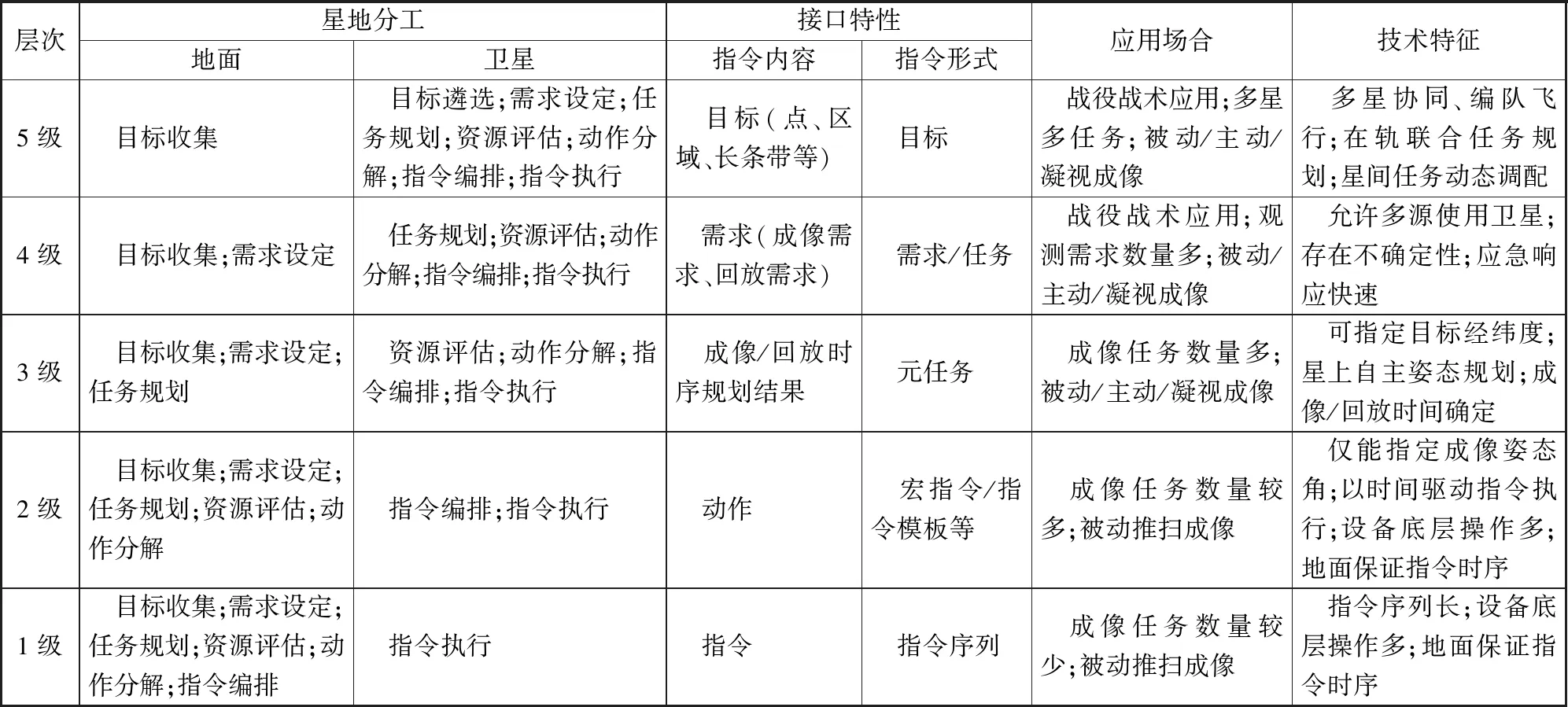
表1 卫星自主任务管理能力分层及特征Table 1 Stratification and characteristics of satellite autonomous task management capability
等级1:传统的地面规划与指令上注模式,从任务规划到指令编排全部在地面完成,并在卫星过境时通过测控链路上注到卫星上。指令上注后,卫星上无法修改,全部执行。
等级2:地面完成任务规划,并将规划得到的卫星动作采用脚本语言进行描述,由星载计算机将卫星动作脚本解释为指令并执行。这种方式能够使卫星具备一些简单的自主能力,包括根据当前状态调整指令的某些参数或者根据事件触发指令序列等,从而在一定程度上减少地面运行管理的负担。
等级3:地面任务规划解决目标分解、时序优化、冲突取舍等计算量较大、过程较为复杂的问题,并将规划结果的主要要素(例如元任务)上注到卫星上,星载计算机在无需考虑时序、资源冲突的情况下,对接收的规划结果进行解析计算、自主执行。
等级4:地面针对选定目标,设定观测需求并上传到卫星上。星载计算机根据卫星状态和观测需求的综合情况,进行成像过程具体规划、检查,然后生成动作和指令并执行。卫星上可以自主消解执行过程中的冲突,尽量合理、高效完成观测需求。
等级5:地面仅提供目标信息,星载计算机完成从需求设定、任务规划到指令编排的全过程。卫星上具有很高的计算能力和智能性,甚至可以自主生成一些观测需求,从而实现对卫星能力、成像时机和条件的最佳利用。
当前,世界上主要发达国家及我国的遥感卫星自主任务管理发展程度均大致处于2级、3级的水平。高分多模卫星在研制初期即确定了以3级程度的自主任务管理为主要业务运行模式,并开展4级程度的自主任务管理在轨试验,以此为指导,开展地面、卫星上的任务规划与任务执行方案设计,并完成地面验证与在轨应用。
3 地面段任务管理方案设计
高分多模卫星星地任务系统总体组成和信息接口,如图4所示。其中,各个用户构成了卫星的应用系统,地面任务管理中心、数据处理中心、接收系统共同构成卫星的地面系统,位于国内外的测控站及中继卫星共同构成卫星的测控系统。
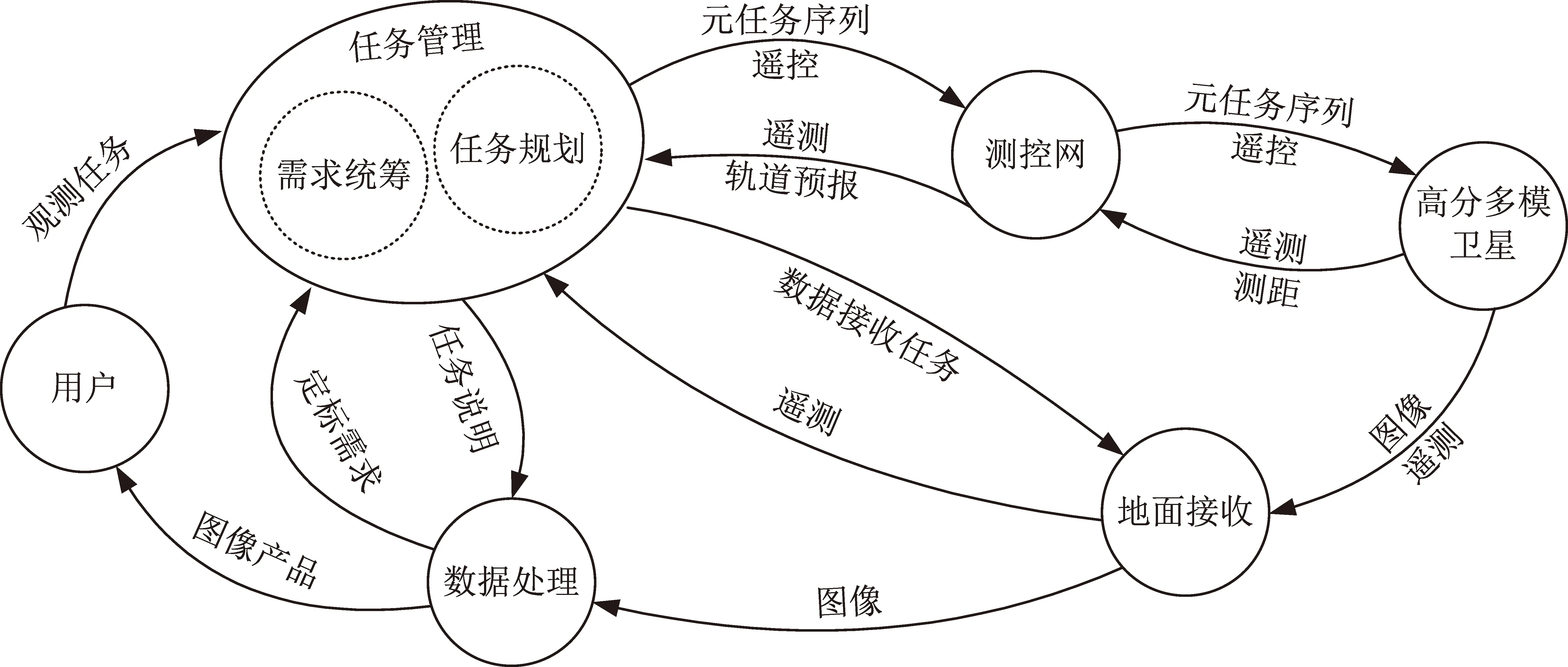
图4 高分多模卫星星地任务系统总体组成Fig.4 Ground-to-satellite task system composition of GFDM-1 satellite
地面任务管理中心负责收集来自多源用户的观测需求并进行需求统筹、分解,以1天为周期、按圈次进行任务规划,生成元任务序列,具体流程如下。
(1)对观测需求进行预处理,将区域、长条带目标按一定规则拆分为条带;对每个条带进行成像工作模式选择和成像圈次分配;对一轨内的条带序列进行时序规划,得到初步的成像元任务序列。
(2)根据地面站或中继卫星的可用时段,添加数据回放元任务。
(3)考虑卫星资源能力,对元任务序列可行性进行检查,对卫星的电源、存储资源等变化情况进行计算检查,并结合气象条件等计算各个成像元任务的成像质量。
(4)依据检查分析结果,对元任务序列进行优化调整和最终确认,形成各个圈次的元任务序列。
(5)将元任务序列通过测控网上传至卫星,同时制定地面接收系统的工作计划并发送给地面接收系统。
上述规划流程主要依靠高分多模卫星地面任务规划软件实现,其组成如图5所示。其中:目标管理模块用于设定用户所需的点、区域和长条带目标;需求管理模块用于对成像目标赋予成像要求,包括成像模式、成像角度、时效性、重要程度、图像质量要求(分辨率、光照、云量)等;任务处理与规划模块集成了任务时序寻优、成像过程姿态规划、切换过程姿态规划、积分时间计算等核心规划算法,用于圈次分配、条带分解、条带排序、成像任务规划、回放任务规划等过程,是卫星敏捷成像能力充分发挥的关键;任务复核模块用于对元任务规划结果进行能量平衡、数据平衡、成像质量的复算,检查任务时序的正确性和约束条件的满足性;元任务编辑管理模块将最终的元任务序列编辑、转换为卫星能够识别的数据格式,并进行码字正确性的复核检查。地面任务管理中心可以每天1次或数次上传规划好的元任务序列。卫星在每个轨道周期的任务圈开始前,对一轨内的元任务进行解析,生成各个分系统可以执行的动作序列和指令序列,并按时序完成相应操作,实现各类敏捷成像工作模式。同时,地面任务管理中心还可以根据卫星能力约束,随时提前几分钟安排应急任务,将新的元任务序列上传给卫星,并启动任务重置机制,以控制卫星在当圈执行新的元任务序列。
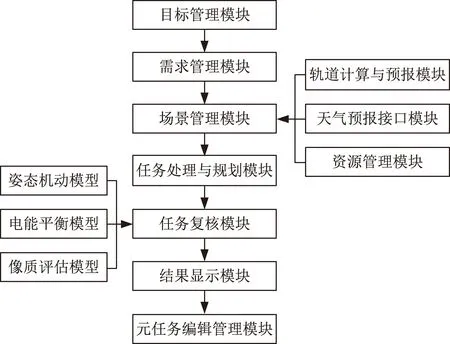
图5 高分多模卫星任务规划软件系统组成Fig.5 Composition of GFDM-1 satellite task planning software system
4 星上自主任务管理方案设计
高分多模卫星能够根据收到的元任务序列,自主完成任务执行全过程的姿态规划,以及对于相机、数传等分系统动作的规划,将元任务信息自主转换为连续的动作序列和指令序列,自动执行并对执行过程进行监控。
由表2可得出:在阴极极化条件下,该材料——介质体系在自腐蚀电压(-658mV)的电位下断裂寿命最长,其应力腐蚀敏感性最小、抗拉强度最大、应变量也最大。在比自腐蚀电压更正的-1 300、-1 000mV的电位下,也能激发10#钢的应力腐蚀开裂。
地面上注元任务数量增多和模式复杂性提高,可能对卫星的在轨运行带来安全性影响。尽管这种影响是地面要确保消除的,但仍然希望卫星具有自主任务检查与自我保护能力。卫星在执行任务前,能够根据任务数量、时序等约束限制,对元任务序列进行可行性分析、检查和确认,避免任务执行过程违反卫星使用限制,确保卫星安全。
(1)元任务的上注与删除。地面可以在任何时段向卫星上注元任务;但对于下一个任务圈的元任务,应当在该任务圈开始前10 min完成上注。同时,地面也可以在任务圈开始时刻10 min之前,通过指令删除未开始的任务圈的元任务,方式包括:删除指定元任务、删除指定任务圈的所有元任务、删除所有元任务。在任务圈开始后,地面可以删除当圈所有元任务,并上注新的元任务。
(2)元任务合法性检查。在任何情况里,元任务上注后,卫星都立刻对该元任务进行“合法性检查”(由数管分系统负责),即对元任务序列是否有明显问题进行检查,以及对明显上注有误的元任务进行剔除。
(3)元任务预处理。在任务圈开始前启动(由数管分系统负责),主要工作内容包括:提取当圈元任务、生成元任务序列表;对当圈元任务的时序关系进行检查;对当圈元任务的次数、累计时长等进行检查。
(4)动作规划与指令生成。数管分系统在完成元任务预处理之后,进行动作规划与指令生成。这一过程主要是一系列的映射、展开和逻辑操作。
(5)当圈元任务的处理。为了应对紧急任务,允许用户随时删除当圈元任务并注入当圈新的元任务,处理方式为:地面上注元任务重置开始指令,数管分系统删掉本圈内全部元任务;在此情况下,地面可以重新注入包括应急任务在内的本圈全部新的元任务(需要确保提前至少5 min);地面上注元任务重置结束指令,数管分系统重新进行本圈元任务的解析和执行。
(6)执行过程异常情况的处理。如果整星发生异常,包括姿态机动过程异常、电源异常等,卫星终止执行当前的元任务,并删除本圈所有未执行的元任务。
5 任务管理应用效能分析
5.1 地面研制阶段效能分析

图6 高分多模卫星任务规划仿真系统应用Fig.6 Application of GFDM-1 satellite task planning simulation system
卫星研制团队完成了星上自主任务管理软件的设计开发,结合任务规划仿真系统编排生成的各种测试工况和用例,对卫星在轨执行各类任务的正确性进行充分验证。
工况1:卫星一轨内连续执行35次点目标成像,任务规划结果如图7和图8所示。可见,卫星在纬度跨度40°的范围里,即可完成35次点目标成像。该工况通过了电测确认,全过程执行正常。
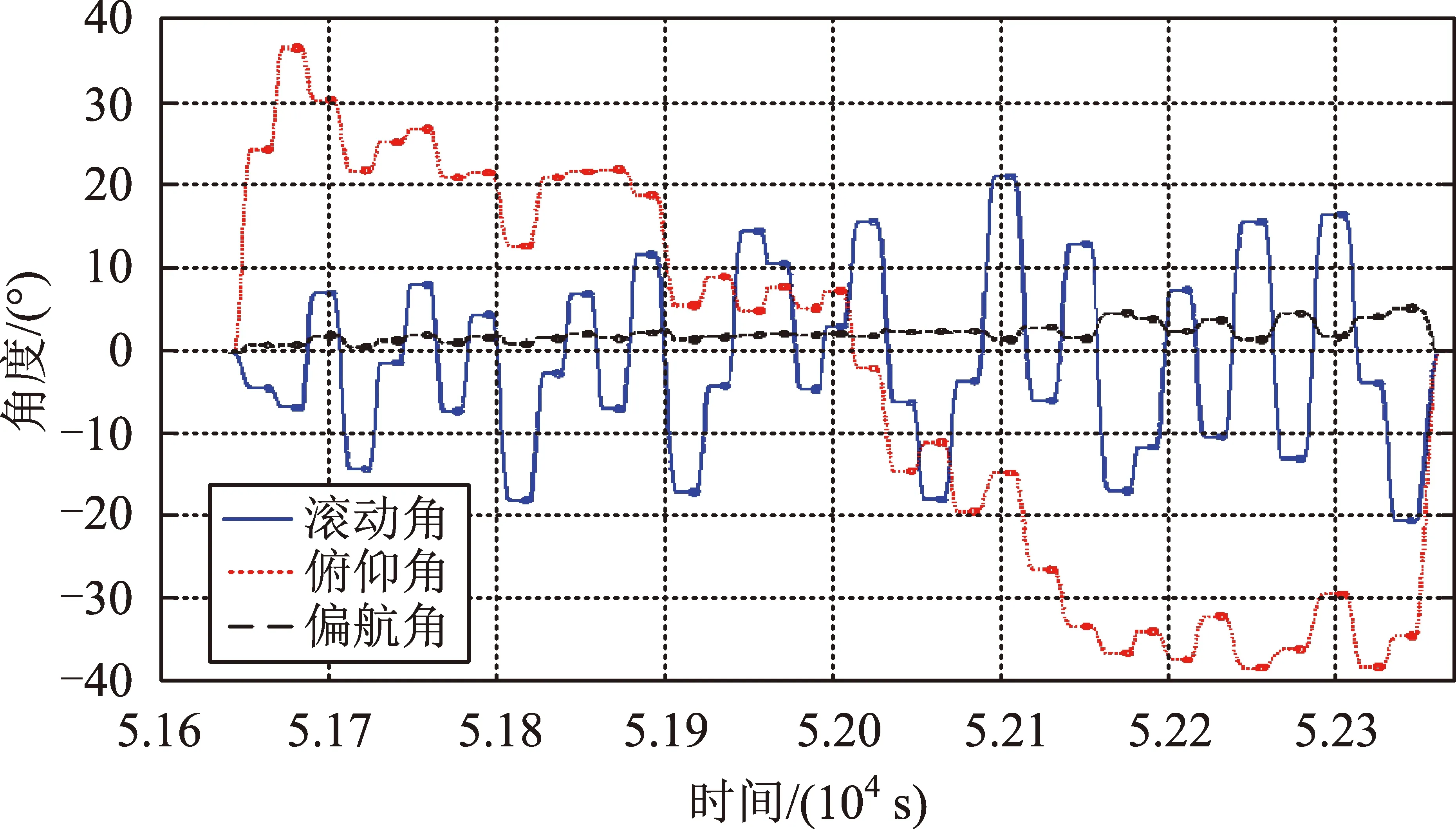
图8 卫星全过程姿态角(工况1)Fig.8 Satellite attitude angle (example 1)
工况2:卫星一轨内进行各种成像模式的组合测试,包括多点目标成像、区域拼幅、多角度成像、立体成像和连续的非沿迹主动推扫等,任务规划结果如图9和图10所示。经测试,各种成像模式都能正确执行,全过程的执行结果与规划预期一致。

图10 卫星全过程姿态角(工况2)Fig.10 Satellite attitude angle (example 2)
在地面对卫星的全部工作模式、工作能力进行了充分测试和验证,保证了卫星入轨后即能投入使用,研制与应用无缝衔接。
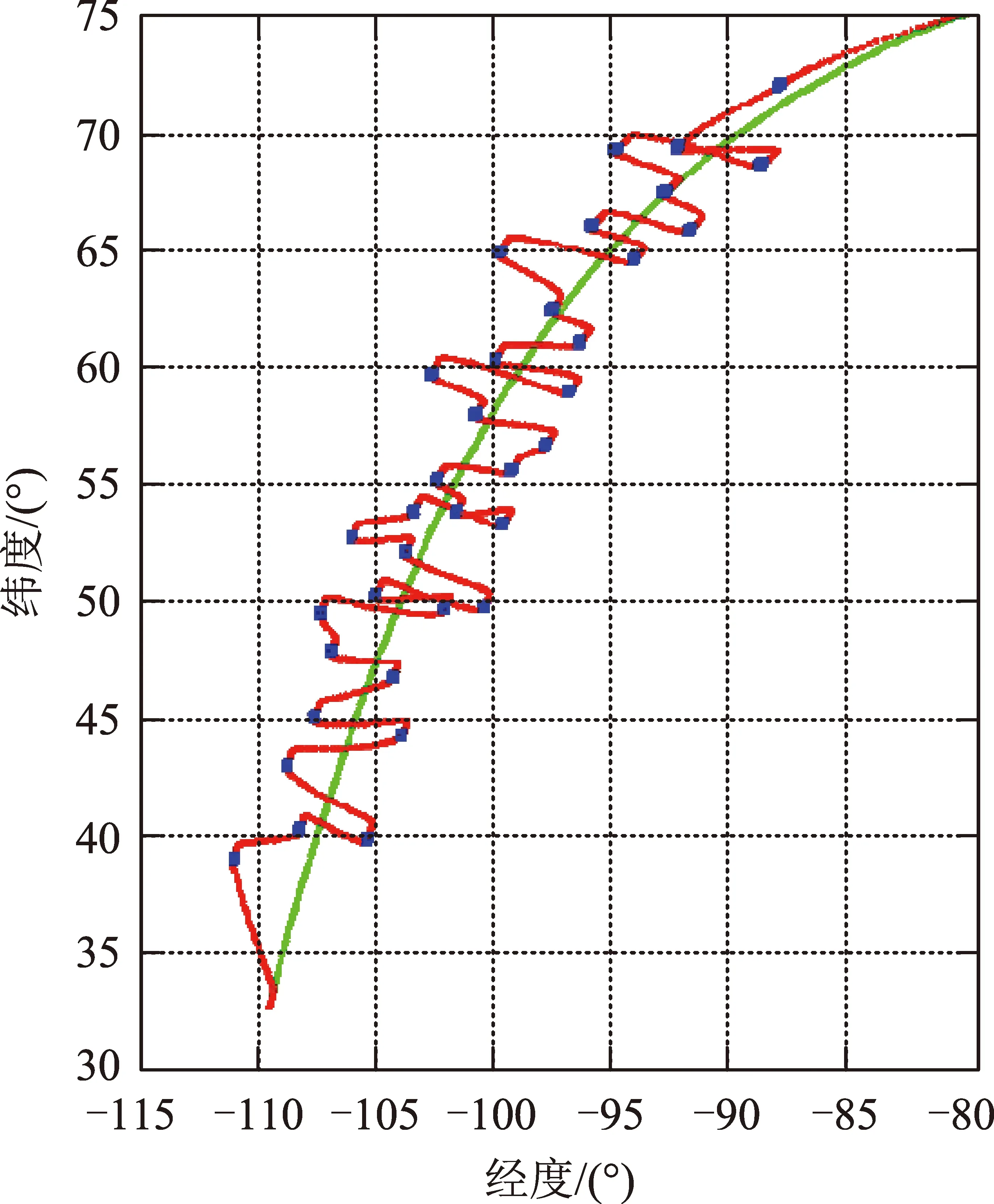
注:浅绿色曲线代表卫星的星下点轨迹;红色曲线代表卫星的摄影点轨迹;蓝色曲线代表卫星成像条带。图7 卫星全过程地面轨迹(工况1)Fig.7 Satellite ground trajectory (example 1)

注:浅绿色曲线代表卫星的星下点轨迹,红色曲线代表卫星的摄影点轨迹,蓝色曲线代表卫星成像条带。图9 卫星全过程地面轨迹(工况2)Fig.9 Satellite ground trajectory (example 2)
5.2 在轨飞行阶段效能分析
高分多模卫星在发射入轨后的飞控期间,迅速开展了成像和回放的功能与模式测试。通过地面任务规划和卫星自主任务执行,在5天的成像与回放任务测试阶段共成像277次(见表2)、回放55次。所有任务全部顺利、正确执行,充分验证了卫星的工作模式及星地任务体系运行过程的正确性。
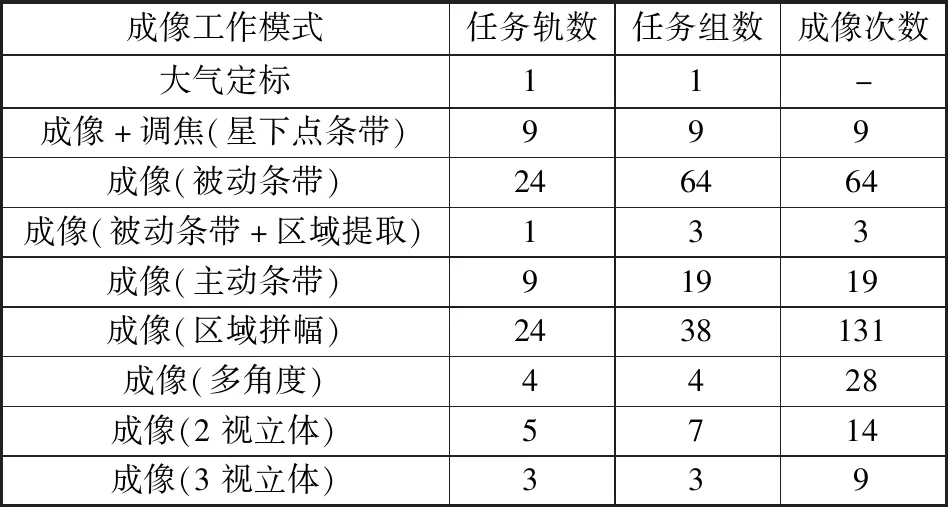
表2 高分多模卫星飞控期间成像任务统计Table 2 GFDM-1 satellite imaging task statistics during flight control period
高分多模卫星在轨飞行期间,各类成像模式可以灵活使用,包括“动中成像”的主动推扫成像模式、同一目标连续12个角度的多视角成像模式、区域目标的连续6次拼幅成像模式等,均可以灵活组合使用,在轨典型成像模式获取图像如图11所示;卫星一轨内能够成像35次,相比以往的大中型低轨遥感卫星提高5倍以上;极大提升了卫星的有效成图效率,提高了卫星的应用价值。
6 结束语
高分多模卫星的星地任务系统由地面部分和卫星部分共同组成,两部分协调配合完成卫星任务的规划、传递、执行及数据的交互工作。为解决任务数量增多、模式复杂度提高等对卫星任务系统带来的难题,研究提出了层次化的星地任务分层架构、星地任务接口的形式和内容。用户进行目标的选取、需求的制定;地面系统采用任务规划软件进行元任务的规划编排并上注卫星;卫星自主完成元任务执行工作,包括元任务解析、约束检查、动作规划与指令编排等,并对任务执行过程进行监视。高分多模卫星通过星地任务管理方案的设计与验证,提高了任务上注效率、执行效率,一轨可实现35次成像,相比以往大中型遥感卫星提高至少5倍;可实现多点目标、区域拼幅、主动推扫、立体、多角度等成像模式的任意灵活组合使用,大幅提高了卫星使用的灵活性、有效图像的获取效率和卫星的应用价值。
猜你喜欢
北京航空航天大学学报(2022年2期)2022-03-08
国际太空(2021年11期)2022-01-19
军民两用技术与产品(2021年10期)2021-11-25
学校教育研究(2020年11期)2020-06-08
航空科学技术(2019年2期)2019-09-10
科学家(2019年3期)2019-08-18
地理教育(2019年1期)2019-03-06
中国化妆品(2017年12期)2017-06-27
科学与财富(2016年28期)2016-10-14
新东方英语(2014年1期)2014-01-07