九条岭水文站AI 智能水位图像识别系统与人工观测水位比测分析
2021-07-02 14:36:30梁捷
甘肃科技 2021年8期
梁 捷
(甘肃省武威水文水资料勘测局,甘肃 武威 733000)
1 AI 智能水位图像识别系统简介
AI 智能水位图像识别系统是一套利用智能化摄像头,采用计算机图像处理识别技术和深度学习模型,依托海量的、高质量的训练数据,为防汛减灾、水情信息采集提供一套完整的解决方案。
该系统打破了传统的水位测量方式,采用AI技术自动处理视频、图像文件,通过对视频、图像的处理、分析和理解,实现水位智能识别和分析,提供了包括自动监视、阈值设置、自动判断多水尺识别和智能告警等服务。
AI 智能水位图像识别系统采用了定时识别和根据水位变幅加测识别相结合的方式进行实时水位识别。九条岭水文站基本水尺断面布设多支水尺监测水位,该系统会根据当前图像中水位情况自动切换水尺识别水位。系统配备数据监控管理软件平台,可利用网页、手机APP 进行数据的查询,并能以Excel 文件导出水位数据。
2 AI 智能图像识别水位与人工观测水位比测分析
为保证AI 智能图像识别水位数据准确并符合《水位观测标准(GB/T 50138-2010)》规定,巡测队成员对AI 智能图像识别水位与人工观测水位进行了比测,对比测过程中发现的问题进行了整改。
2.1 比测方法
根据水位观测标准(GB/T 50138-2010),计算综合不确定度,判断是否符合标准6.2.3 比测结果应符合下列规定:
一般水位站,置信水平95%的综合不确定度应为3cm,系统误差应为±1cm;波浪问题突出的近海地区水位站,综合不确定度可放宽至±5cm。
计算方法:
1)E.0.3 水位观测总随机不确定度和总系统不确定度分别按照下式计算:
(1)当水位观测随机误差有相互独立的若干项E′1、E′2……E′n时,水位观测总随机不确定度按下式计算:

式中:X′1、X′2、……X′n—E′1、E′2……E′n的各单项随机不确定度。
(2)当水位观测的不定系统误差有相互独立若干项E′′1、E′′2……E′′时,水位观测总系统不确定度应按下式计算:
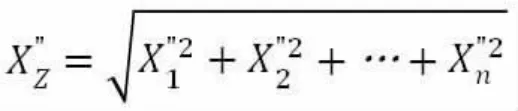
式中:X′′1、X′′2、……X′′n—E′′1、E′′2……E′′n、的各单项系统随机不确定度。
2)E.0.6 采用自动监测设备监测水位时,其不确定度需按下列方法计算:
(1)系统不确定度按下式计算:
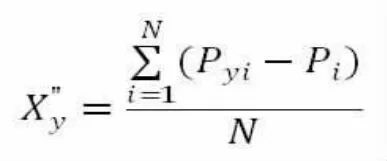
式中:Pyi——自动监测水位;
Pi——人工校测水位;
N——校测次数。
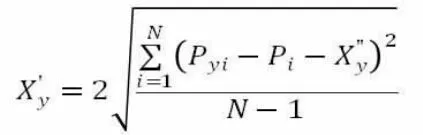
(2)随机不确定度按下式计算:
(3)综合不确定度应按下式计算:
2.2 第一阶段比测
2.2.1 比测过程
首先分别对6 月、7 月AI 智能图像识别水位与人工观测水位进行了比测。AI 智能图像识别水位按6 段制挑选出与人工观测水位相对应的时间段次(水位对比过程线如图1、图2 所示)。
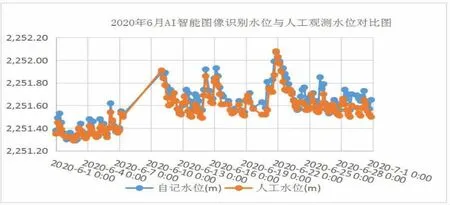
图1 6 月AI 智能识别水位与人工观测水位对比
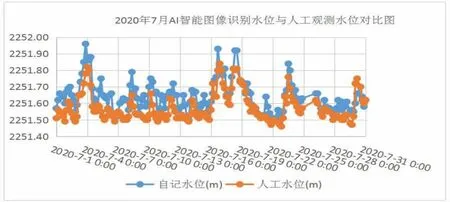
图2 7 月AI 智能识别水位与人工观测水位对比
第一阶段比测结果(见表1)。
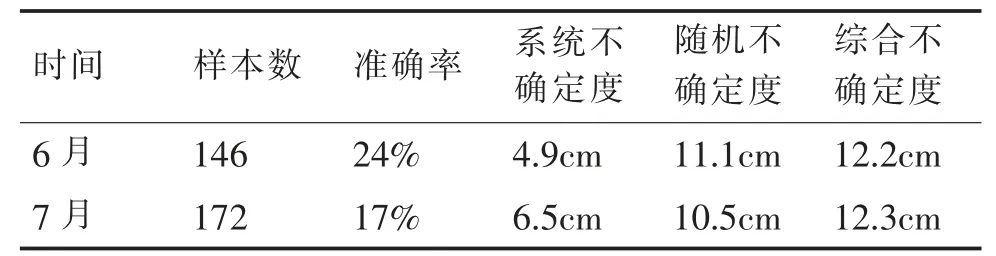
表1 第一阶段比测结果
2.2.2 第一阶段比测结论
通过计算,6 月、7 月综合不确定度均超出3cm,不符合规定。
2.2.3 原因分析
通过6 月、7 月AI 智能图像识别水位与人工观测水位对比图,可以看出AI 智能图像识别水位整体高于人工观测水位。从网页中调取AI 智能识别水位图片可以看出,水尺雍水及波浪是产生误差的主要原因。
AI 智能水位图像识别系统首选靠近河心水尺进行识别,水尺完全淹没后才会选取上一支水尺进行识别。由于河心流速较大,产生的雍水及波浪的问题同样较大。
2.2.4 解决方案
对每支水尺设置最高观测水位,解决系统识别水尺完全被淹没后才会选取上一支水尺进行识别的弊端。通过计算分析,对九条岭水文站基本水尺断面每支水尺设置了最高读数(见表2)。
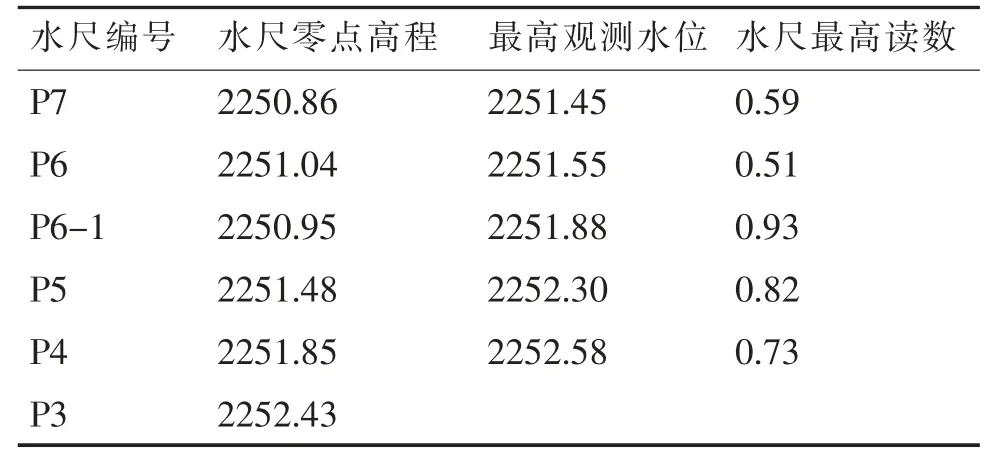
表2 水尺最高读数统计表
经与厂家技术人员沟通后,此方案可以实施。
2.3 第二阶段比测
2.3.1 比测过程
对AI 智能水位图像识别系统按照方案整改后,我们对8 月18 日至9 月18 日的智能图像识别水位与人工观测水位再次进行了比测(水位对比过程线如图3 所示)。
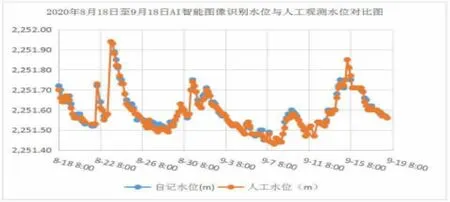
图3 8 月18 日~9 月18 日AI 智能识别水位与人工观测水位对比
第二阶段比测结果(见表3):
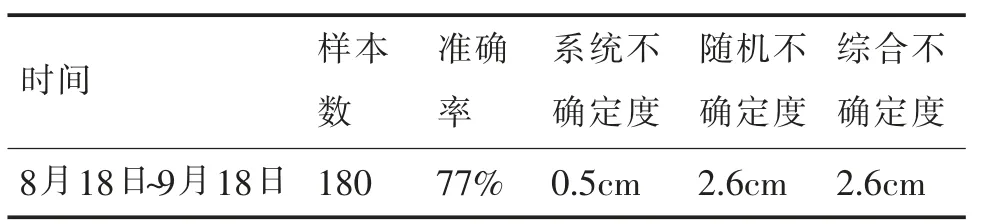
表3 水尺最高读数统计表
2.3.2 第二阶段比测结论
通过8 月18 日至9 月18 日智能图像识别水位与人工观测水位对比图,可以看出AI 智能图像识别水位和人工观测水位过程一致。经计算,综合不确定度未超出3cm,符合《水位观测标准》(GB/T 50138-2010)规定。
3 结论
通过对九条岭水文站AI 智能水位图像识别系统的比测与分析,得出此系统具有较好的稳定性、准确性。建议在其他水文站安装运行,为水文巡测工作提供保障。
猜你喜欢
交通企业管理(2022年5期)2022-09-02 06:55:18
珠江水运(2021年24期)2022-01-23 08:25:10
治淮(2021年6期)2021-08-05 08:55:56
航空动力(2020年6期)2021-01-05 09:02:50
科技与创新(2019年22期)2019-12-07 05:31:26
广船科技(2019年2期)2019-10-16 10:43:02
电子制作(2019年16期)2019-09-27 09:34:50
中国交通信息化(2019年4期)2019-07-13 05:51:34
电子制作(2018年19期)2018-11-14 02:37:04
电子制作(2018年14期)2018-08-21 01:38:16