医疗辅助智能车的研究与设计
2021-06-30 01:43中国矿业大学徐海学院郭荣毓任姝静陈宇航王天阳赵永亮
电子世界 2021年11期
中国矿业大学徐海学院 郭荣毓 任姝静 陈宇航 王天阳 赵永亮
该医疗辅助智能车主要以树莓派及STM32作为主控,使用python和C语言作为主要编程语言设计的以人脸识别及红外测温为主要功能的智能医疗小车,该智能车还包含了无线数据传输、酒精消毒检测、带载物品等功能,在这之中我们还参考了现在的医疗器械的制作设计方案,完善功能、提高使用体验。本文主要讲述了该医疗辅助智能车每个功能模块的研究设计过程及其应用前景,通过对功能的研究分析表明,该医疗辅助智能车的智能化便捷化能更好的减轻医务人员的负担和感染风险。
2020年初新型冠状病毒开始肆虐扩散,广大医务工作者挺身而出冲锋在抗战疫情的第一线,在此期间一些医护人员不幸感染,甚至献出了自己的生命,还有一些医务工作者由于过度劳累倒在病床前,一些痛心的画面在此次疫情期间尤为突出。并且医疗行业是一个与居民生命健康息息相关的产业,当前人们对医护人员的关切度越来越高,而且随着当前疫情在全球不断蔓延,医生的安全问题成为人们至关重要的焦点。而医疗辅助型机器人作为人工智能时代在医疗领域应用的深化,也开始崭露头角,进入大众的视线。为了更好的保护医护人员的安全以及减轻他们的负担研究设计出了该医疗辅助智能车,同时该产品也适用于养老院等服务型场所。该医疗辅助智能车可以更好的帮助医生护士完成简单的操作,尤其在这种传染性很强的疾病中作用颇具显著。有数据指出预计未来十年是智能医疗增长牛市,并有专家人士认为未来医疗辅助小车将会颠覆现有医疗行业的发展格局。
1 各功能模块简介
该医疗辅助智能车以STM32为主控芯片,树莓派作为车体控制器,应用PID算法通过树莓派与移动端配对连接用指令来实现对智能小车自动避障导航等移动的控制。并在车体上加载红外测温模块对人体温度的反馈,用open cv摄像头模块采集人脸信息,并将人物信息和温度数据一并通过STM32主控板和wifi无线模块传输到移动端,达到时刻提醒医生、护士病人提问指标的目的。除此之外医疗辅助智能车还通过抽水泵喷洒消毒液来对可疑房间进行消毒,如果房间酒精浓度偏高浓度测量模块会对另酒精喷洒作业立即停止,从而防止因消毒液浓度过高造成不良影响。并且小车主体还搭载了贮藏功能,可以存放一些药物、医疗器械等从而解放医护人员的双手,还可在储存功能的地方放置紫外线灯来达到物理消毒的效果,其总体功能框图如图1所示。
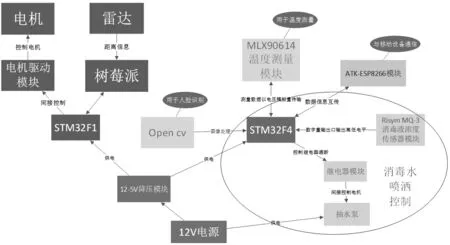
图1 医疗辅助智能车总体功能框架
1.1 智能小车主体功能研究设计
智能小车的设计分为了基础框架层、传感器层、控制层和执行层。通过各层间的相互作用与在PC机上下载安装Ubuntu虚拟机,并在虚拟机上安装ros系统与树莓派通过指令调试连接从而控制小车的导航避障的功能。
(1)基础框架层:基础框架层采用双层底板亚克力+双层主板亚克力使得小车主体更加坚固除此之外还包括还包括两个直径65mm优质橡胶轮,一个1.5寸尼龙以及万向轮和2个495线电机,使轮子转动一圈会产生的脉冲信号高达1980个从而达到高精度便捷转向。
(2)传感器层:传感器层采用思岚A1雷达与树莓派相连,通过将雷达测量的数据发送到树莓派来控制小车。思岚A1雷达结构简单并且能实现远距离探测的功能,不受雾云雨的阻挡,具有全天候全天时的特点,而且激光雷达还具有一定的穿透能力,适合于医院这种复杂环境的应用。
(3)控制层:控制层采用树莓派与PC机相连,通过树莓派自发的局域网使PC机和树莓派同处于一个局域网下进行互相通信,其中树莓派内嵌有ROS系统。
(4)执行层:执行层则包括STM32F103主控板、电机驱动模块和降压模块并将三个模块融合到一块板子上从而防止因电子模块过多而造成的小车整体的凌乱,其中降压模块是将为电机供电的12V电源降到5V来为STM32F103主控板和树莓派进行供电,STM32F103主控板则是将控制层树莓派发出的指令进行转化用电机驱动模块运用差速法控制电机来达到转向或启停的目的。
1.2 红外测温功能研究设计
红外测温功能是根据被测物体的红外辐射出的能量来确定物体的温度,不与被测物体接触,所以不影响到被测物体温度场的分布。具有温度分辨率较高、响应速度较快、测温范围较广、不受测温上下限的限制、稳定性好、可以测量微小目标温度等特点,应用领域颇为广泛。对于该功能的实现我们采用MLX90614红外非接触式测温传感器,其工作电压5V,10°FOV(field of view),可测量温度范围为环境温度-40℃~125℃,物体温度-70.01℃~+382.19℃,足以达到该项目对测温的要求,温度数据输出有PWM和SMBus两种模式。该系列模块的温度解析度可达0.01°C,体积小巧,目标温度和环境温度由内部81101内置的热电偶测定测量,从81101中输出的两路温度信号是由被检测物体的温度(To)与传感器自身的温度(Ta)共同作用的结果,在理想情况的下热电元件的输出电压为:
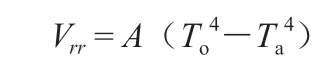
其中温度单位均为Kelvin,A为元件的灵敏度常数。
输出的电压信号分别经内部MLX90302器件上高性能、低噪声的斩波稳态放大器放大再经一个17-bit的模数转换器(ADC)和强大的数字信号处理(DSP)单元后输出,并于STM32F4单片机相应的规定端口相连,单片机接收信号后通过内部程序的控制运算可实现高精度和高分辨率的温度采集。
1.3 消毒液喷洒控制功能研究设计
医疗辅助智能车中该功能模块主要由控制单元和执行单元构成。
(1)控制单元:控制单元由MQ-3酒精浓度传感器和STM32F4单片机构成。Risym MQ-3消毒水浓度传感器具有稳定性高、灵敏度高、选择性好以及使用寿命长的特点,该模块由微型Al2O3、陶瓷管和SnO2敏感层、测量电极和加热器构成敏感元件,固定在塑料或者不锈钢的腔体内,加热器为气敏元件的工作提供了必要的工作条件,当其受热后,加温室环境中的可燃气体浓度迅速增大,传感器的内阻阻值将会迅速降低,Vout值将逐渐增大,当超过设定阈值时,其数字端输出高低电平发生转化并将信号发送给单片机,通过单片机内部程序控制另执行单元中的继电器达到消毒液喷洒启停的控制。
(2)执行单元:执行单元由12V抽水泵、消毒水储存箱和继电器构成,由于STM32F4单片机最大输出电压为5V无法直接给12V的抽水泵供电所以要通过继电器间接控制从而达到不同电压同时控制的要求。
1.4 人脸识别功能研究设计
本医疗辅助智能车该功能采用的是基于opencv开源视觉库进行人脸识别的方法。OpenCV是开源的,它对图像处理方面的函数和工具类代码经过了优化,具有可移植性好、实时和执行率高等特点。整个系统先通过摄像头对病人的所有的类harr特征进行采集,再采用Adaboost算法进行人脸的检测,然后采用PCA降维算法获取特征脸子空间,把PC平台的人脸识别分类器下载到嵌入式目标平台,最后结合最近邻匹配算法达到在线人脸识别的效果。特征提取是人脸识别的其中问题之一。PCA采用的是一种数据降维的方法,它将数据维数高的样本用较少的特征向量去描述,目的是压缩数据。在降维过程中,要使用向量线性变换来表示数据的关键信息,所以能尽可能的保留人脸的主要信息。Opencv通过和STM32F4串口相连再通过无线通信模块间接与移动端进行信息交换,达到人脸信息识别调用的作用。
1.5 无线通信功能研究设计
医疗辅助智能车中该功能主要用于温度测量和人脸识别数据通过该功能与移动数据端通信,实现测量数据实时远距离互传的目的。此功能我们将用ATK-ESP8266 WIFI模块来实现。其内含TCP/IP协议栈,进而实现单片机串口与WIFI之间的转换。利用ESP8266模块,只要对医疗智能车上的普通串口进行简单的串口配置,就可以通过WiFi传输体温检测结果、人脸识别数据等,实现数据传输。该医疗辅助智能车采用的是AP模式:ESP8266自身开启Wi-Fi,作为一个热点,手机或电脑直接连到ESP8266的热点从而进行所需数据的传输控制。
2 总结语
本文设计的是以树莓派及STM32作为主控的医疗智能车,此车采用MLX90614红外测温模块、使用open cv模块对病人信息采集数据后通过ATK-ESP8266无线模块与上位机无线通信,实现数据传输。通过MQ-3酒精传感器模块进行消毒液浓度的检测控制其喷洒的启停来达到医院以及其他公共场所消毒作业的作用。实验数据表明整个医疗辅助智能车系统性能稳定、使用方便、安全可靠。所以,未来市场应用前景广阔、推广价值高。
猜你喜欢
作文中学版(2022年1期)2022-04-14
学生天地(2020年31期)2020-06-01
电子制作(2019年14期)2019-08-20
电子制作(2019年11期)2019-07-04
电子制作(2017年17期)2017-12-18
电子制作(2017年8期)2017-06-05
电子制作(2016年21期)2016-05-17
中国酿造(2016年12期)2016-03-01
电子设计工程(2014年8期)2014-02-27
自动化与仪表(2014年10期)2014-02-26