
陆域机动平台越障技术的发展现状与发展趋势分析
2021-06-29 06:29:20王华轩张书畅席军强
车辆与动力技术 2021年2期
王华轩, 张书畅, 席军强
(北京理工大学 机械与车辆学院,北京 100081)
随着现代科技的进步和文明的发展,人们对陆域机动平台的环保性能、动力性能等方面提出了更高的要求.由于野外搜寻、矿场勘测、灾后救援、星球探索等需求的增加,陆域机动平台的越障性能也逐渐受到人们的关注.
陆域机动平台在执行勘测任务时,复杂地形是不可忽视的外部条件,由于机动平台越障能力有限,往往会出现事倍功半,甚至无功而返的情况.在进行灾后救援工作时,机动平台越障能力的强弱,与被困人员的生存概率有着直接的关系.
综上所述,从经济损失、人民生命安全等多角度来看,越障能力是陆域机动平台十分重要的一项技术指标,为了满足当前的以及可以预见的未来的任务提出的更高要求,提升陆域机动平台的越障能力是一个重要的课题.
1 陆域机动平台越障技术概述
越障方案,是陆域机动平台上实现越障功能的结构或方法.目前已有的越障设计方案一般都是基于一定的需求产生的,如具有较强越障能力的月球车、履带式全地形车、煤矿探测机器人.综合查阅到的资料,可以将现有的越障方案归纳为两大类:单动力模式和多动力模式.单动力模式是机动平台上仅有一种驱动方式的越障方案,比如轮式、履带式、足式等,这类越障方案结构简单,便于生产、维修,越障性能有较大的局限性.多动力模式是单动力模式的叠加,将多种单动力模式越障方案复合在一起,使机动平台面对复杂地形有了更多的选择,具有更高的适应性,但也存在结构复杂等问题.
2 陆域机动平台越障技术发展现状
目前,越来越多的研究机构基于不同用途,对陆域机动平台的越障方案展开了研究.下面对越障方案进行详细介绍.
2.1 轮式
轮式越障方案包括3种,分别为常规轮式、异形轮式、变形轮式.其本质上与传统车辆结构类似,所以具有移动速度快、结构简单的优点,但是其越障能力受到车辆硬件条件的限制.
2.1.1 常规轮式
常规轮式越障方案,是指对传统机动平台的底盘、悬架系统、车轮结构进行优化设计,而不增设其它结构的越障方案.
对底盘、悬架系统进行优化设计的机动平台,越野能力、底盘性能都会得到提升,同时也保证了一定的速度需求.解放军总装备部车船装备论证试验研究所的金晓辉等[1]对军用轻型全地形车的发展现状及发展趋势进行了分析,指出并分析了几种军用陆域机动平台,包括美军装备序列中的运动家(sportsman)和M-gator、英国的Supacat公司生产的6×6全地形机动平台,这类机动平台提升越障能力的主要措施是采取独立悬挂、多轮驱动,从而提高悬挂的动行程及车辆的动力性能.
对车轮结构的改进方案,主要应用于星际探索等特殊工况.哈尔滨工业大学的邓宗全等[2]研发的行星轮式月球车,车轮采用轮组式车轮(如图1),使机动平台具有了一定的越障能力,在此方案中,更看重车辆对于特殊地形的通过能力,在必要时可以舍弃其速度性能.
此种机动平台的越障能力主要取决于行星轮的直径与行星车轮系杆的半径.在跨越障碍时,机动平台行驶方向应尽量垂直于障碍.
2.1.2 异形轮式
异形轮指不同于普通圆形车轮的非圆形车轮结构.其核心在于设计非传统的车轮形状,来实现特殊的功能,提高机动平台的越障性能.非圆形车轮会使机动平台在行驶过程中重心发生上下波动,导致车辆的稳定性下降,运行速度会因此受限.

图1 轮组式车轮
The Center for Biologically Inspired Robotics Research模仿蟑螂的运动形态,提出了一种异形轮式机动平台(如图2)[3].该机动平台装有4个异形轮,具有交替对角步态.在面临一些特殊的路面时,可以保持较高的行驶速度,具有一定的越障能力.美国西储大学研制了具有类似结构的越障机器人,可应用于城市搜救、海底勘探等场合.
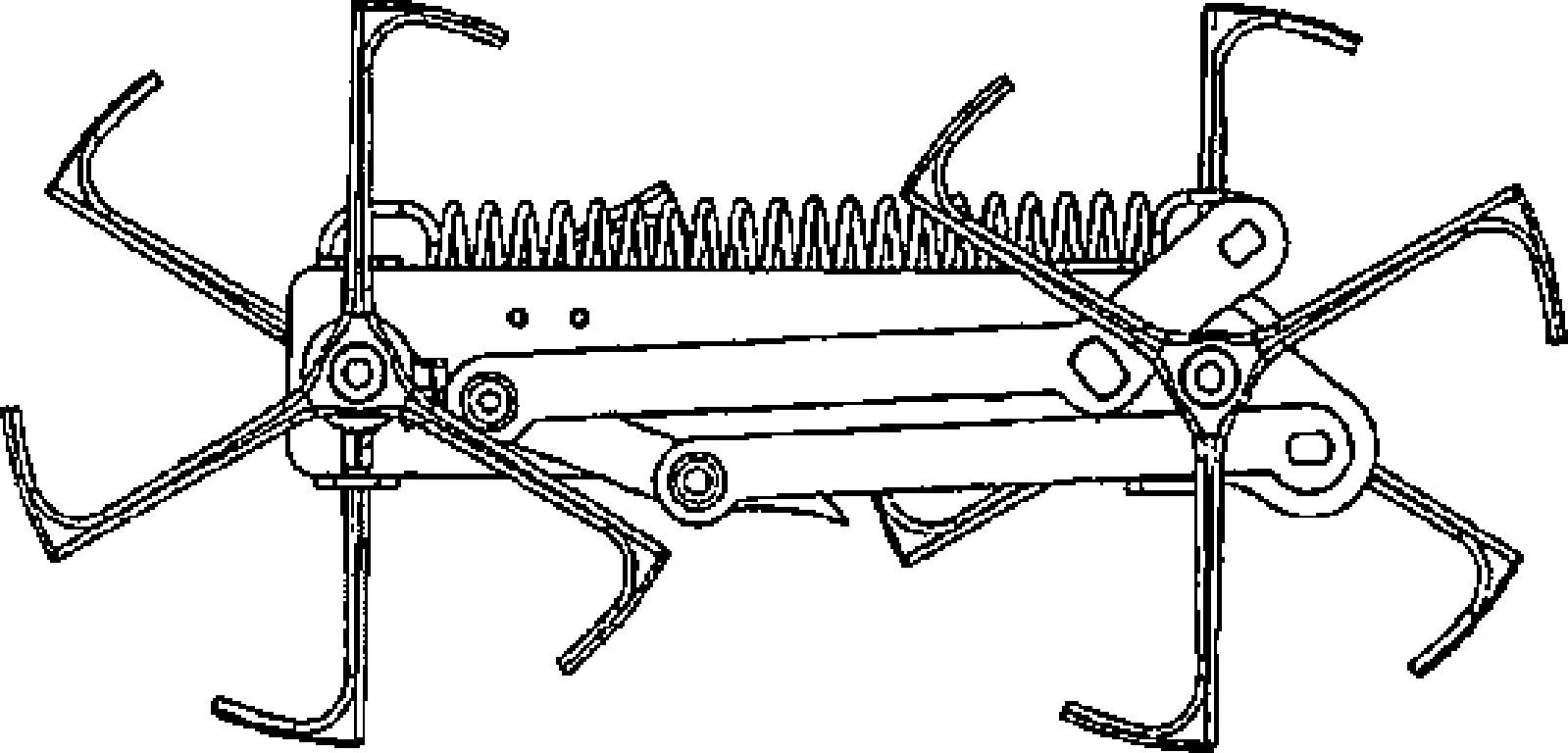
图2 Mini-WHGESTM机器人
北京交通大学的王丹等[4]提出了一种异形轮式机动平台.具有六个半圆结构的车轮.与Mini-WHGESTM相比,在行驶过程中,该机动平台可以有效地减缓车辆重心的上下浮动,兼顾了运动的平稳性和越障能力.
2.1.3 变形轮式
变形轮是指通过对普通整圆车轮结构进行设计,使其能够根据外部环境条件,主动或被动地进行变形,从而保证机动平台在平坦路面上快速平稳的同时,获得相较于常规轮式机动平台更强的越障能力.
韩国首尔国立大学研发的变形轮式机动平台Wheel Transformer[5],采用了新型的可变形车轮.车轮的变形过程由外界环境所决定的,无需额外的执行机构,大大降低了控制方案的复杂性.
Quattroped是台湾大学研制的新型四腿/四轮可转换机动平台[6],该机动平台采用独特的变换机构,可以在车轮和腿之间切换形态,具有很好的越障能力,同时兼顾了轮式机器人的快速平稳性.
2.2足式
目前常见的步行机动平台以两足式、四足式、六足式应用较多,其中,四足式陆域机动平台具有结构简单、运动灵活、稳定性好等突出优点,在军事、抢险救灾等众多方面拥有广阔的发展前景,因此,吸引了国内外众多研究机构的重视.
美国波士顿动力公司研制的BigDog是目前最具代表性的四足机动平台.BigDog每条腿由四个液压马达驱动,步行模式速度约为1.6 m/s,奔跑模式速度约为2 m/s,可在泥地、雪地、石堆、松软地表等表面行进,平坦地面可载重154 kg.
2.3 履带式
此处提到的履带式越障方案,指双履带式越障方案,相较于普通轮式机动平台具有更好的越障能力.但是对于坡度较大的障碍,双履带式机动平台在攀爬的过程中可能会出现翻倒的现象.
评价其爬坡稳定性的主要参数是稳定裕量,即机动平台重心位置到后轮中心的水平距离,也就是重力对于后轮中心点的力臂大小.双履带式车辆的稳定裕量受路面情况影响,当坡度增加时,稳定裕量会急剧减小,最终导致车辆倾覆.这对于双履带式车辆来说属于结构性缺陷,是难以避免的.
2.4 轮足复合式
轮足复合式越障方案将轮式方案的高速性与足式方案的灵活性结合,综合两者的优点.此方案可以根据轮、足的相互关系进一步细分为轮足串联式、轮足并联式.
轮足串联式越障方案,指用可动的连杆机构连接车轮与机动平台主体.一般情况下将连杆机构锁死,利用车轮驱动.特殊工况时,连杆机构摆动充当足的作用,实现越障功能.可以按照轮足的关节数,将此越障方案进一步划分为:单关节式、多关节式.
单关节式越障方案,车轮与机动平台主体之间仅有一个刚性连杆连接.陆军装甲兵学院的刘西侠等[7]研发了越障六轮机动平台(如图3).车身分为两段,前车体和后车体,中间铰接.前车体可以在液压缸的作用下,绕铰接点上下摆动,完成折腰动作.六个车轮通过摆臂与车体铰接,摆臂可以带动车轮绕铰接点摆动,完成摆臂动作.控制重心块的移动用以保证车辆的平稳.此方案可翻越的最大垂直高度主要受到中间轮的影响.
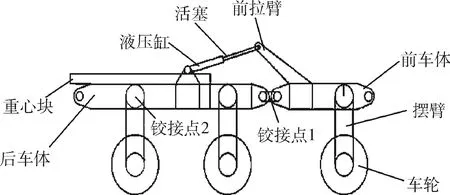
图3 单关节轮足串联式六轮机动平台
徐工集团的王福德等[8]在普通的轮足式越障方案的基础上,增设了辅助机械臂.当车辆越障时,底盘的轮足式结构来执行翻越的动作,顶部机械臂进行辅助,用以维持车身的稳定,进一步提高车辆的越障能力.
多关节式越障方案,即车轮和机动平台之间由多段刚性杆构成的连杆机构进行连接,越障能力得到进一步的提升,但结构也更复杂,控制更困难.北京航空航天大学与哈尔滨工业大学联合研发的六轮腿式机动平台NOROS[9],就是多关节式越障方案的典型实例(如图4).此方案将车轮安装在小腿上,当小腿折叠时,车轮接触地面行进.轮与平台主体之间有腰关节、髋关节、膝关节.可通过关节处的转动完成翻越障碍的工作.足与腿之间靠球铰链连接.在不同行驶状态下,机动平台均可以保持多种不同的姿势,提高了复杂地形的适应能力和通过性.
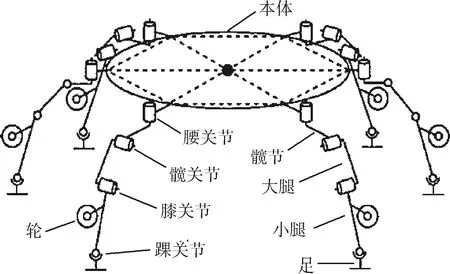
图4 NOROS机动平台
2.4.2 轮足并联式
轮足并联式越障方案,指机动平台上同时装备有轮、足两套行进结构,且将两者完全隔离开.当机动平台处于轮式行进状态时,足脱离地面,不参与行进动作.当机动平台处于足式行进状态时,腿足机构从车辆上伸出,支撑起车辆,使车轮脱离地面,依靠腿足行进.
2.5 轮履复合式
轮履复合式越障方案,指在机动平台上同时装备有车轮与履带,在保证平台行驶速度的前提下,提升其越障能力.通常利用变胞机构理论,完成车轮与履带的转换工作.轮履复合式越障方案可以进一步分为轮履一体式、轮履分开式.
随着经济发展以及外来文化的影响,复杂、耗时的传统工艺被现代化的快速艺替代,社会流动带来民族文化认同上的缺失,传统土家族服装实用功能减弱。在传统式微的情形之下,土家族服饰逐渐消失在民众生活的视野中。再者,随着新时代对民族文化的消费,土家族服饰在“再设计”的过程中为了迎合表演或者观者“猎奇”的心态发生了很多的变化,现代舞台表演用的土家族服饰除了“西兰卡普”元素之外,已经和苗族、侗族甚至西式礼服相差不大。伴随着土家族传统服饰的“消逝”,现在在民众生活中硕果仅存的就是绣花鞋垫,而且绣花鞋垫伴随着时代发展,其形式、图案都发生了很大的变化。
2.5.1 轮履一体式
轮履一体式越障机动平台的车轮与履带是一体的,依靠可变形履带与伸缩机构完成行驶模式的转变.此种方案采用一套耦合重构机构,结构紧凑,可在两种行进方式之间进行快速切换.但是由于可变形履带长度、伸缩机构的限制,越障能力并不强.北京理工大学的郭文增等[10],哈尔滨工业大学的付宜利等[11]均进行过此方面的研究.
2.5.2 轮履分开式
轮履分开式越障方案中,车轮与履带是两个独立的行走部,可以分别驱动车辆运动.西安科技大学的田海波等[12]对轮履复合式机动平台进行了研究.当平台在平直公路上行驶时,注重其行驶速度,完全由车轮驱动机动平台行进.变胞机构可以抬升车体,提高了面对复杂环境的通过性.当平台处于山丘、丛林等较差路况中时,变胞机构抬升车轮,放下履带,使履带接触地面并实现驱动,提升了机动平台的越障能力.
中国科学院沈阳自动化研究所的李智卿等[13]也进行了轮履复合式机动平台的研究,并提出了可行的方案.
2.6 足履复合式
据前文所述,双履带式车辆的稳定裕度受地形的影响,越障能力难以提升.可以采用铰接多履带方案增加车辆的稳定裕度.
贵州大学的罗瑜等[14]对四履带串联式行走机构进行了研究(如图5).车辆由四个履带构成,前面两个履带可以在活塞控制下绕铰接点上下摆动,完成翻越障碍的动作,越障高度比双履带车辆有了较大的提升.
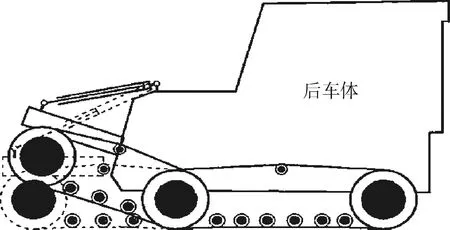
图5 四履带串联行走机构
依照多履带的思路,在四履带的基础上进一步发展出了六履带机动平台.西安科技大学的王川伟等[15]将六履带的装置应用到了煤矿探测机动平台上.
履带的增多,可以增多机器人的步态,但也会带来许多问题:控制的复杂化、电机的负荷能力等.应该在满足越障要求的前提下,简化机构.以达到安全、可靠的要求.
2.7 轮足履复合式
根据前文对轮式、履带式、足式机动平台的描述可知,三者各有优缺点,可以通过整合,使它们的优点得以充分发挥,缺点相互弥补.轮式具有移动速度高、行驶平稳的优点,但其越野能力较差.履带式地面适应能力强,对复杂地形有一定的跨越能力.足式依据其仿生学优势,具有极强的越障能力.若上述三者结构安排合理,将得到越障能力、越野能力、速度性能都较强的陆域机动平台.轮足履复合式越障方案可以根据具体结构进一步分为:以轮式平台为主体的履带摆臂式和以履带平台为主体的车轮摆臂式.
2.7.1 履带摆臂式
履带摆臂式越障方案中,轮式机动平台是主体,履带铰接在平台前后(如图6).在正常行驶时,车辆只依靠车轮驱动,保证行驶的高速性.当遇到崎岖路面时,履带接地,抬升整个车体,平台依靠履带驱动,越障能力有了一定程度的提升.当遇到较难跨越的障碍时,履带可以充当“足”的角色,通过摆臂动作跨越障碍,越障步态与前文所述的六履带机器人相似.
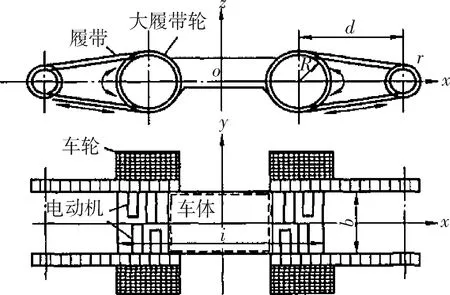
图6 履带摆臂式机动平台
北京理工大学的段星光等,太原理工大学的徐刚等,均进行过此方面的研究[16-17].
2.7.2 车轮摆臂式
车轮摆臂式越障方案中,履带式机动平台为主体,车轮通过摆臂与车体连接.在正常行驶时,依靠履带驱动,具有一定的越障能力.当遇到崎岖路面时,车轮可以参与驱动,摆臂能够辅助车辆跨越障碍,提升车辆的越障能力.
中国科学院机器人学重点实验室的王挺等[18]研制了轮足履复合式机动平台CLIMBER.平台主体为履带驱动,前端处铰接一个摆臂,摆臂端部有车轮,车辆同时具有轮、足、履三种驱动方式.可以完成倾倒自动复位、陷入软土自行脱离等高难度动作.中国矿业大学的王军等[19]也对车轮摆臂式越障机动平台进行了研究,并提出了可行的方案(如图7).
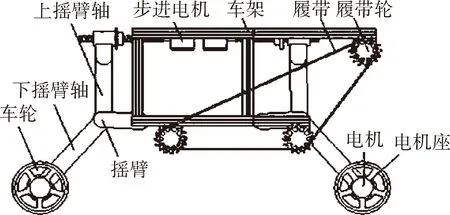
图7 车轮摆臂式机动平台
2.8 涵道风扇式
陆域机动平台面对一些无法逾越的障碍物时,可以利用涵道风扇使平台短时间内升空,实现越障工作.
涵道风扇可以实现垂直起落、水平飞行,并且结构紧凑,运行时噪声小,效率高,在相同功率条件下,涵道风扇式驱动模式产生的推力更大[20].西北工业大学、南京航空航天大学、哈尔滨工业大学均进行了此方面的研究.
涵道风扇的引进对于陆域机动平台来说是一个极具创新性的想法,利用涵道风扇将平台抬升后越过障碍.在灾难救援、物资搬运等方面都会带来极大的便利.
3 陆域机动平台越障技术的发展趋势
依据越障技术目前的发展框架来看,从单动力模式到多动力模式,继续发展,会出现适应性极强的多动力模式的越障方案,但是可以预见,这种方案机械结构、控制模式也会非常复杂.
所以在设计越障方案时,不能简单进行结构堆砌,要通过机构复用来简化机动平台的机械结构,使部分结构在多种行进模式下均可以发挥作用,删除冗余机构.
在现有的发展框架之外,我们也要寻找新的设计思路.大自然中,一些动物的运动特性可以给我们很大的启发.猎豹在陆地上奔跑的速度可以达到115公里每小时;山羊可以在陡峭的悬崖上运动;蛇类依靠身体的蠕动实现快速运动等.这些生物的运动原理对越障技术的研究有很多借鉴意义.所以说,仿生学将会给陆域机动平台越障方案的研究带来巨大的影响.
综合上述分析,结合实际需求.未来,仿生学原理会给陆域机动平台越障技术的发展带来巨大的影响.
4 结 论
综上所述,通过对陆域机动平台越障技术发展现状进行总结,将越障技术划分为8类,分别为轮式、足式、履带式、轮足复合式、轮履复合式、足履复合式、轮足履复合式、涵道风扇式.在对其越障能力进行分析后,可以得出结论:单动力模式的越障方案结构简单、性能可靠,但是越障能力往往较弱.多动力模式则相反,其越障性能、环境适应性较强,但是结构复杂、控制困难.在现有的越障方案的发展趋势下,机动平台的性能增强与结构简化之间存在矛盾,难以提出兼顾的方案.
因此,在陆域机动平台越障技术未来的研究中,一方面要利用机构复用对现有方案的机械结构加以简化,在追求高性能的同时,也要保证机动平台的可靠性.另一方面,应该积极地寻找新的设计思路,可以从生物运动规律中寻找灵感,仿生学原理会为相关研究带来启发性的想法.
猜你喜欢
现代经济信息(2023年15期)2023-09-04 05:51:39
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
中国石油石化(2021年8期)2021-03-30 12:39:14
军民两用技术与产品(2021年10期)2021-03-16 06:05:36
石油化工建设(2019年6期)2020-01-16 08:03:42
科技视界(2019年11期)2019-06-20 01:22:08
经济技术协作信息(2018年7期)2019-01-14 03:05:40
数码设计(2018年7期)2018-10-20 09:39:24
中国军转民(2018年1期)2018-06-08 05:52:57
橡胶工业(2015年4期)2015-02-23 23:29:38
