基于Modelica的挑线机构动态特性分析
2021-06-29 04:39:08张小康
西部皮革 2021年11期
张小康
(武汉纺织大学,湖北 武汉 430200)
引言
在工业平缝机缝制工作中进行面线供给和收紧线圈的机构叫做挑线机构。目前大多数缝纫机挑线机构均采用曲柄摇杆机构,总体机构为一种四连杆机构[1]。现以A 型工业平缝机作为研究对象,研究挑线机构的动态特性,包括挑线杆的运动轨迹、挑线力、加速度,这对于平缝机线迹质量的优化具有重要意义。
1 Modelica 语言介绍
Modelica 语言是基于非因果建模思想,采用数学方程(组)和面向对象结构来促进模型知识的重用,是一种面向对象的结构化数学建模语言,支持类、继承、方程、组件、连接器的连接。它采用基于广义基尔霍夫原理的连接机制进行统一建模,可以满足多领域需求。涉及领域包括电气、机械、热力学、液压、生物、控制等,并且至今积累了大量可复用的领域库[2]。
对于基于Modelica 平台建立的机构物理模型,在多体库中一般有Frame_a 和Frame_b 连接接口,将Frame_a 和Frame_b 通过组件属性定义,进而接口定义了组件所有的运动特性,在多体库的预定义组件中,由关节、实体及力单元组成,这些组件也是由接口Frame_a 和Frame_b 反映组件与模型仿真中的坐标变换,并以数值可视化体现。
2 挑线机构建模
2.1 挑线机构参数
挑线机构是一种典型的曲柄摇杆机构,其机构杆组图(如图1 所示),现以A 点为为原点建立坐标系,假设逆时针方向为正方向,与角速度ω 同向,初始位置为曲柄AB 共线与Y 轴正方向,θ 为曲柄AB 转动角度。杆组中各杆长度参数(如表1 所示)。
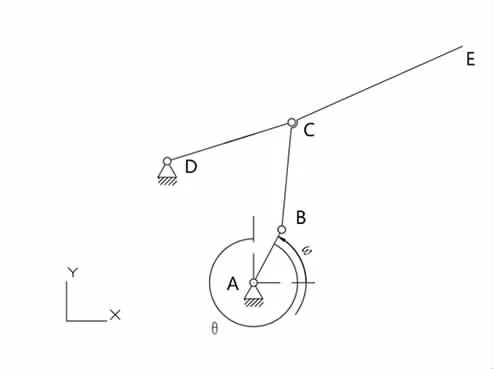
图1 挑线机构杆组图
2.2 模型创建
按照表1 中的杆长数据于Modelica 平台中构建挑线机构物理模型(如图2 所示),将每一根连杆(BodyBox)对应到相应的连杆,通过转动副(Revolute)将前者连接,设定主动件的转速(ConstantSpeed)及机架(FixedRotation)姿态。

表1 各杆长度及机架点坐标
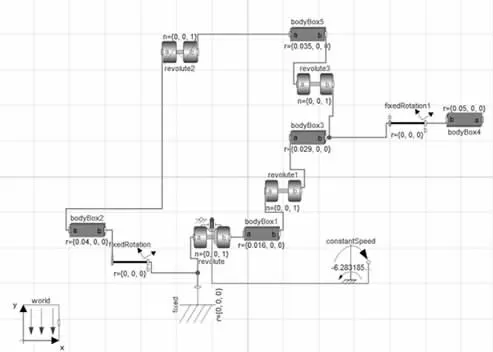
图2 挑线机构物理模型图
3 挑线轨迹计算
在利用建立好的物理模型获得挑线机构挑线轨迹前,先对图1 杆组图以图解法获得挑线轨迹方程。
以A 点为坐标系原点,则B 点坐标为:

根据机架D 点坐标(-23,32.5),结合连杆LBC、LCD长度条件求解C 点坐标,可得:

由式(2.2)解的(XB≠XD)时,令:
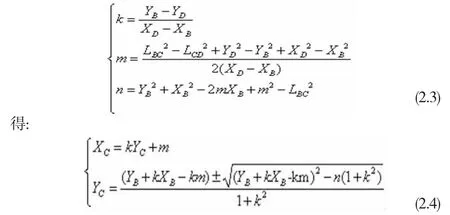
现对各杆件与Y 轴的夹角有:φAB、φBC、φCD
AB 杆:

BC 杆:
CD 杆:
由连杆BCE 角度关系,根据余弦公式可得:
联立式(2.1)、式(2.5)、式(2.6)、式(2.7)、式(2.8)可得E 点坐标:

通过设定机架A 点坐标,生成挑线环E 点运动轨迹,即获得挑线轨迹方程,如图3 所示。按照挑线轨迹,根据缝纫供线需求,挑线机构分为收线与放线两个状态。在设定平缝机转速恒定的情况下,按照单位时间面线的需求,为降低断线率,挑线机构轨迹图中供线曲线长度相对于收线曲线多出10%~20%[3]。同时挑线机构的面线供线量是根据缝纫线迹长度来确定的,并在此基础上进行累积,多余的供线通过夹线器来限制,保证线迹质量稳定。

图3 挑线杆轨迹
4 仿真及结果分析
4.1 仿真结果
通过Modelica 平台中的多体库建立的挑线机构物理模型,在仿真求解后建立仿真动画窗口,选中bodyBox4 显示其运动轨迹(如图4 所示)。与图3 挑线机构挑线轨迹对比验证。在挑线机构的物理模型的构建中,针对典型的曲柄摇杆机构,四杆机构的杆长条件确定了该机构的运动特性,挑线机构的挑线轨迹一般为柳叶形,观察其轨迹轮廓,挑线机构具有急回特性并且没有死点,保证整体传动机构不会因为并联其中的部分机构卡死。在缝纫工作进行中,在确定的缝料和线迹条件下,挑线机构所牵引的面线为一个线迹的耗线量,即确定了缝线耗线量与挑线机构结构的耦合性。

图4 挑线杆追踪轨迹
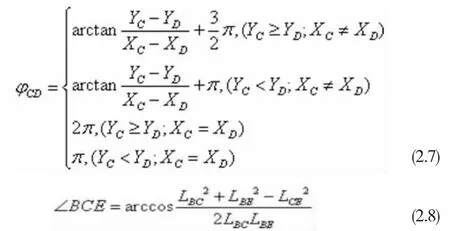
在获得挑线杆运动轨迹的同时,对挑线杆末端在Y 方向的位移和加速度进行提取,将挑线杆的关于时间的运动特性参数转换为关于平缝机主轴转角的运动曲线,(如图5 所示)。
图5 挑线杆运动曲线
4.2 结果分析
在工业平缝机的缝制过程中,缝纫质量的优劣往往取决于缝制要素的特性。缝制要素包括:缝线、缝针、缝料。而挑线机构的作用对象为缝线,则缝线特性与挑线机构的动态特性相互耦合。
缝线特性的影响因素很多,就缝线张力而言,缝线张力的影响因素主要分为三点,包括挑线机构在缝制工作中的面线供线和收线作用、缝线-面线的过线道设计及缝线自身的物理特性[4]。
在计算缝线受到挑线杆作用而产生的惯性力时,需要得到缝线在挑线作用下的竖直Y 方向的速度,或者挑线杆在Y 方向的加速度αy,(如图5 所示)。挑线杆开始向下,加速度达到最低值αymin。假设面线所受惯性力为Pz,挑线杆所收面线质量为mz。因为面线是经过挑线孔来实现收线的,所以面线的速度也是挑线杆速度的两倍,则有惯性力:

对于挑线杆所收面线质量mz:

则联立式(4.1)、式(4.2)可得面线的惯性力Pz:

面线的长度lz 可以近似认为是挑线杆的Y 方向位移、X 方向位移和挑杆孔到旋梭的距离之和,lz=353x10-3m,缝纫机转速设定为4000 r/min,带入式(4.3)可得:

因此,缝线在缝制过程中会存在有不可忽视的惯性力,影响到缝线特性,如缝线张力,造成这一影响的因素为挑线杆的速度变化。
5 结语
本文从工业平缝机挑线机构的整体机构组成出发,利用Modelica 平台完成了挑线机构的物理模型建模与仿真分析,对比理论计算结果,获得了该机构的相关运动学数据。结合其运动规律,验证了缝线在挑线机构作用下特性出现变化的潜在因素。
猜你喜欢
金秋(2023年6期)2023-07-22 09:19:56
辽宁丝绸(2022年1期)2022-03-29 00:58:44
散文百家(2021年5期)2021-11-12 08:56:01
现代青年·精英版(2021年6期)2021-07-06 15:49:35
中华养生保健(2020年4期)2020-11-16 01:31:00
作文周刊·小学一年级版(2020年20期)2020-09-02 07:17:56
瞭望东方周刊(2015年46期)2016-04-01 00:25:55
实用手外科杂志(2015年3期)2015-08-27 01:53:20
海峡旅游(2015年4期)2015-07-22 09:40:26
中国医疗美容(2015年1期)2015-07-12 10:06:37