
基于FY-4A的一种自适应阈值对流云提取算法
2021-06-29 03:31纪丞曾燕邱新法黄勇
气象科学 2021年3期
纪丞 曾燕 邱新法 黄勇
(1 南京信息工程大学,南京 210044;2 安徽省气象科学研究所,合肥 230031;3 寿县国家气候观象台,安徽 寿县 220026;4 江苏省气象科学研究所,南京 210009)
引 言
对流性天气直接影响着人类社会的生产生活,一方面有助于大气污染物扩散,另一方面也易致灾。强对流天气如短时强降水、雷暴、冰雹、下击暴流和龙卷风等具有突发性强、生命史短、致灾性强等特点,已成为天气预报业务难点[1-2]。
气象雷达是研究大气对流运动的常用工具,而与气象雷达相比,气象卫星具有观测范围广、影响因素少等优点,且随着气象静止卫星技术的发展,其时空分辨率显著提升,对空间尺度小、生命史短或发展迅速的对流活动的监测能力显著提高[3-5]。此外,气象静止卫星可提供可见光、红外甚至微波等多通道的光谱信息,为对流活动的描述与研究提供更丰富的数据资料。FY-4卫星是中国继FY-2卫星后发展的新一代气象静止卫星[6]。FY-4A卫星是FY-4系列的第一颗科研试验卫星,采用三轴稳定姿态控制方式,所携带的先进静止轨道辐射成像仪(Advanced Geosynchronous Radiation Imager, AGRI)具有14个观测通道,最高空间分辨率可达500 m,时间分辨率可达分钟级[7]。已有诸多基于气象静止卫星识别对流云的方法,究其本质都是阈值法,关键在于如何设置阈值。红外长波通道单阈值法是通过气象静止卫星识别对流云的一种最早、最基础的方法,其具体操作为将云顶亮温(Temperature of Black Body, TBB)低于某一阈值则识别为对流云,该方法原理清晰、操作简单,但存在识别准确率不高的问题,因为阈值设置偏低或偏高都会引起漏判或误判[8],常用的阈值有241 K、221 K等[8-12];水汽与红外窗区通道亮温差法(Brightness Temperature Difference, BTD)被用来研究平流层水汽及冲顶对流[13],但对不同卫星应使用不同阈值[14-15],也有研究使用该亮温差进行对流云定强[16];欧洲气象卫星开发组织提出的RDT-CW (Rapidly Development Thunderstorms-Convection Warning)算法在长波红外通道采用了自适应阈值算法,考虑了对流云团的垂直方向结构,可用来有效监测初生对流(Convection Initiation,CI)和快速发展对流(Rapid Developing Convection,RDC)[17]。
本文利用台风“利奇马”影响期间FY-4A卫星资料以及新一代气象雷达资料,使用基于FY-4A卫星水汽—红外窗区的亮温差法,提取对流云最佳阈值,并通过自适应阈值法提高对流云提取准确率和识别率,为强对流天气短临预报研究等提供有效参考。
1 资料与研究方法
1.1 资料来源
研究区域为(15°~45°N,100°~130°E),研究时段为2019年8月9日06时—11日03时(北京时,下同)。采用FY-4A的AGRI一级数据中的第10和12通道,第10通道水汽通道(Water Vapor, WV),中心波长为7.1 μm,第12通道红外窗区通道(Infrared Window, IRW),中心波长为10.7 μm,分辨率均为4 km。FY-4A卫星采用CGMS LRIT/HRIT全球规范定义的静止轨道标称投影,地理坐标基于WGS84参考椭球计算得到。为充分利用原始数据精度且便于分析计算,在对数据进行投影换算后,最邻近插值到研究区域间隔为0.04°的等经纬网格上。
雷达数据用于获取算法参数以及验证对流云提取效果,采用MICAPS3.0的组合反射率(CREF)全国拼图latlon格式产品,分辨率为0.01°,同样插值到研究区域的0.04°等经纬网格上。
研究区处在FY-4A全圆盘(DISK)数据开始扫描后的1~4 min处,中国区(REGC)数据开始扫描后的2 min之内。为了尽可能使卫星数据和雷达数据时间上匹配,FY-4A数据起始观测时间需要比CREF产品时间提前对应时间差,如8月9日06时18分的CREF数据对应8月9日06时15分的FY-4A全圆盘数据、8月11日02时36分的CREF数据对应8月11日02时34分的FY-4A中国区数据。研究时段内共计113个匹配时次,均匀分成包含57个时次的训练集和56个时次的验证集,训练集用于获取算法参数,验证集用于验证评价对流云提取效果。以验证集中2019年8月10日17时36分为例的CREF和IRW如图1所示。

图1 2019年8月10日17时36分:(a)CREF;(b)FY-4A AGRI IRW
1.2 研究方法
1.2.1 水汽—红外窗区亮温差法
水汽与红外亮窗区温差BTD表示为:
BTD=TBWV-TBIRW
(1)
式中:TBWV表示水汽通道亮温;TBIRW表示红外窗区通道亮温。
常用的BTD阈值有-5、0、5 K等。水汽与红外亮窗区温差法判识对流云主要原理为:对流层中,云上存在水汽吸收水汽通道辐射,而红外窗区通道辐射很少被吸收,因此BTD为负值,当出现对流天气时,云顶越高,云上水汽就越少,水汽通道亮温就越高且越接近红外窗区通道亮温,使BTD接近0,当发生强对流或冲顶对流时,水汽进入平流层逆温层,使水汽通道亮温进一步增大甚至超过红外窗区通道亮温,BTD变为正值。
但除了对流云,高卷云也可以达到较高高度使BTD增大,这导致用于提取对流云的BTD阈值越低,卷云噪声就越高。
1.2.2 自适应阈值算法
结合水汽与红外亮窗区温差法的对流判识,在IRW通道采用类似RDT-CW的自适应阈值算法进行对流云提取,即为自适应阈值算法。具体步骤如下:
在TBIRW中寻找所有局部极小值即云顶冷中心,并根据云顶冷中心亮温T按升序进行排序,对每一个中心亮温为T的云顶冷中心执行如图2所示的判断流程。

图2 每一个云顶冷中心的判断流程
通过对每一个潜在对流云团以△T=1 K为步长探索最适宜的边界,实现了IRW通道亮温阈值的自适应。BTDthr为水汽—红外窗区亮温差法判识对流的阈值。AREAlimit为用于快速排除处在卷云区的冷中心的初始面积阈值,参考中尺度天气最大水平尺度2 000 km,对应AREAlimit取值为2 500个像元。Ratiolimit控制对BTDthr信任程度。通过对冷中心的排序,从最低的冷中心开始标记可以确保被当前冷中心高度高于其所控制其他冷中心,减少其他冷中心的判断开销,提高计算效率。
1.2.3 评价方法
气象雷达反演中常用反射率因子大于40 dBZ这一标准来识别对流性降水,但也有学者使用35 dBZ这一阈值[18]来识别初生对流。由于雷达数据和卫星数据之间存在时间误差和观测对象的差别,本文采用CREF>35 dBZ这一较为宽松的阈值作为对流云区域参考。评价指标采用准确率P(precision)、识别率R(recall)、调和均值H(harmonic mean),其定义如下:

(2)
(3)
(4)
式中:TP为正确提取的对流云像元数;FP为错判为对流云像元数;TN为正确判断为非对流云像元数;FN为错误判断为非对流云像元数。
准确率描述的是识别出的对流云中真正是对流云的比例,识别率描述的是真正的对流云中被正确识别为对流云的比例,调和均值是综合准确率与识别率的评价指标。由于雷达数据存在覆盖范围和质量控制造成的部分区域缺测,所以评价时只考虑有雷达观测数据的区域,各评价指标取多时次的平均值。
2 结果与分析
2.1 水汽—红外窗区亮温差法
在训练集中使用水汽—红外窗区亮温差法进行对流云提取,采用的BTD阈值从0 K降至-5 K,间隔1 K。
由表1可见,BTD阈值从0 K到-5 K放宽对流云判识条件的过程中,准确率不断降低,识别率不断提高,这说明在对流云判识条件逐渐放宽的过程中,误判为对流云的像元和正确判断为对流云的像元都在增加。且准确率的降低速率在BTD阈值从-2 K变为-3 K时最大,识别率增长的速率随BTD阈值的降低不断降低,调和均值在BTD阈值取-2 K时达到最大,这说明BTD阈值取-2 K时边际效益最高,即在最大程度减少卷云等噪声的同时获得最高的准确率与识别率。

表1 不同BTD阈值识别效果
与图1相同,以2019年8月10日17时36分为例,BTD>-2 K的识别结果如图3所示。由此可见,BTD>-2 K的识别结果基本与图1中CREF暖色区域相吻合,江苏等地的台风、广东等地的局地雷阵雨区域均能识别到,但是识别到的云团比较破碎,空洞较多。且台湾、江苏东部部分有雷达回波的区域没有被识别出来,这是由于此时对流云已接近消散,云顶高度变低所致。
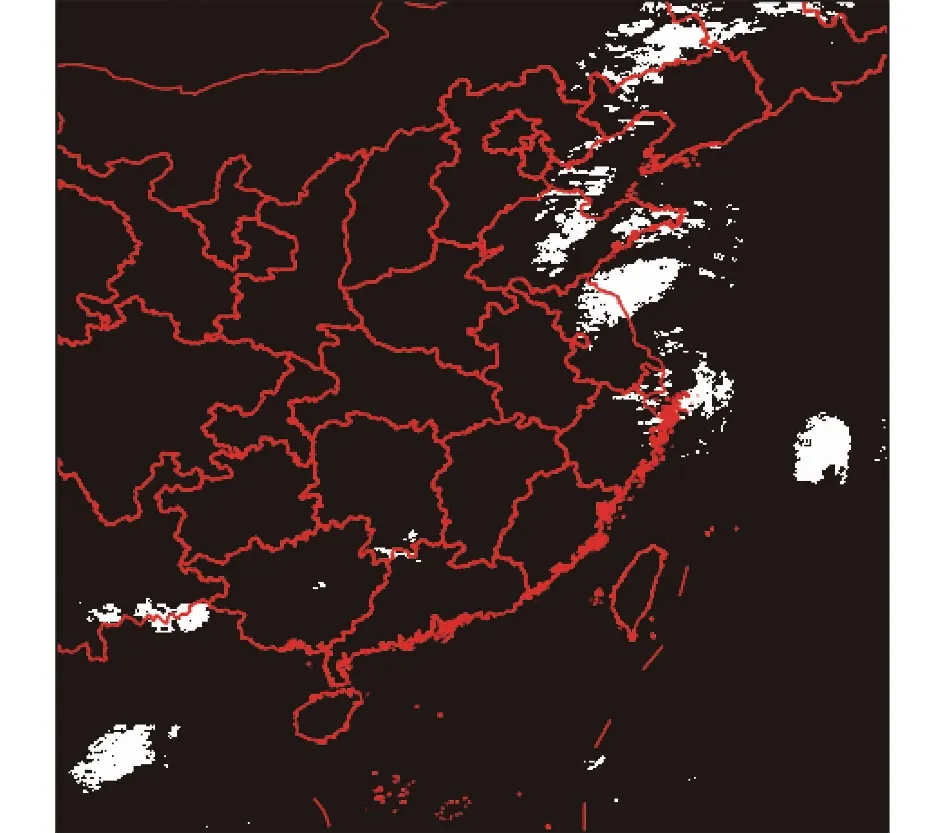
图3 2019年8月10日17时36分BTD>-2 K判识结果
2.2 自适应阈值算法
在训练集中利用图2所示自适应阈值算法,BTDthr取值为上文所述的边际效益最高的-2 K,Ratiolimit取值从0.6到0.9的对流云识别效果如表2所示。

表2 不同Ratiolimit识别效果
在Ratiolimit的降低过程中,出现了类似降低BTD阈值所产生的识别效果变化,即准确率不断降低,识别率不断提高,调和均值在Ratiolimit取值为80%时达到最大。因此,认为此时自适应阈值法的对流云识别效果最好,下文中Ratiolimit取值均为80%。
与图1、3相同,以2019年8月10日17时36分的数据为例,通过自适应阈值算法提取对流云结果如图4所示。由此可见,相比较直接用BTD>-2 K提取,用自适应阈值算法识别的对流云更完整,并且进一步屏蔽了台风外围的部分零碎的BTD>-2 K的卷云区域。从算法的描述可以看出在探索每一块潜在对流云团的过程中,限制云团中BTD>-2 K的面积与云团面积之比不低于Ratiolimit,对BTD>-2 K所识别的强对流区域进行了补全、合并且过滤了达不到该条件的噪声信号。而台湾、江苏东部部分有雷达回波的区域同样没有被识别出来,表明自适应阈值算法也继承了水汽—红外窗区亮温差法可能漏报弱对流云的缺陷。

图4 2019年8月10日17时36分自适应阈值法判识结果
2.3 量化效果对比
集中验证进一步采用组合反射率大于25、30、35、40、45 dBZ作为对流云区域参考进行自适应阈值算法与水汽—红外窗区亮温差法提取效果对比如表3所示。

表3 不同程度对流云识别效果
由表3可知,与单独使用BTD>-2 K相比,自适应阈值算法提取对流云的准确率、识别率、调和均值均有所提高,对比表1可以说明自适应阈值算法并不是单纯放大BTD>-2 K识别的所有区域,而是通过补全真实对流区域、屏蔽零碎的卷云等噪声确实减少了漏报和误报。
当组合反射率阈值增大即对流云判识越来越严格时,卫星数据提取的准确率不断下降,可能导致这种情况的原因之一是卫星与雷达数据之间的观测时间存在误差,更主要的原因是虽然卫星与雷达都可以观测对流云团,但是观测角度不同可能造成的系统误差。尽管存在误差,但不断提高的识别率也说明卫星与雷达的对流云观测相互间确实有参考意义。
3 结论
利用FY-4A的水汽通道、红外窗区通道亮温资料和MICAPS3.0的组合反射率CREF资料,分析了水汽—红外窗区亮温差法和自适应阈值法提取对流云的效果。主要结论如下:
(1)基于FY-4A提取对流云的最佳水汽—红外窗区亮温差BTD阈值为-2 K,该阈值最大程度减少卷云影响的同时,对对流云提取的准确率和识别率最高。BTD阈值过低虽然可以提高识别率,但会导致准确率降低,引入更多卷云噪声;BTD阈值增大虽然可以提高准确率,但是会导致识别率下降,造成更多弱对流区域漏报。
(2)效果检验表明,自适应阈值算法提取对流云比单独使用水汽—红外窗区亮温差法的准确率、识别率、调和均值都高,云团更完整,可进一步过滤卷云噪声。自适应阈值算法将云顶冷中心附近的像元看做云团整体来考虑,通过控制水汽—红外窗区亮温差BTD>-2 K区域所占云团的面积比从而实现对流云的补全、合并且过滤卷云等噪声。
结合水汽—红外窗区亮温差法的自适应阈值法虽然提高了对流云提取的准确率和识别率,但也继承了其漏报初生或即将消散对流云的缺点。但由于自适应阈值算法具有拓展性,可在结合水汽—红外窗区亮温差法的步骤中尝试更多判识方法以减少漏报,进一步提高准确率和识别率。此外,在研究中还发现由于卫星与雷达在观测对流云团时的角度不同可能会造成系统误差,但可以通过改进雷达识别对流云的算法进行降低,这有待于进一步探索。
猜你喜欢
农业工程学报(2022年11期)2022-08-22
小资CHIC!ELEGANCE(2021年40期)2021-11-08
儿童故事画报·发现号趣味百科(2019年4期)2019-05-10
电子制作(2018年23期)2018-12-26
中国建筑金属结构(2018年4期)2018-05-23
中国高新技术企业(2017年5期)2017-05-05
软件(2016年6期)2017-02-06
物联网技术(2016年11期)2017-01-12
电脑知识与技术(2016年24期)2016-11-14
安徽冶金科技职业学院学报(2015年3期)2015-12-02
