穴苗移栽机双旋转式分苗装置设计
2021-06-29 01:33赵斌栋曹卫彬王吉奎宋文彬
农业工程学报 2021年8期
任 玲,赵斌栋,曹卫彬,王吉奎,王 宁,宋文彬
穴苗移栽机双旋转式分苗装置设计
任 玲,赵斌栋,曹卫彬※,王吉奎,王 宁,宋文彬
(1. 石河子大学机械电气工程学院,石河子 832003;2. 农业农村部西北农业装备重点实验室,石河子 832003)
为了解决移栽机整排取苗后投苗不连续、作业效率不高、穴苗易破损的问题,该研究设计了一种整排放苗的分苗装置,运用2排投苗台交替运动实现无间断投苗。通过台架试验,依据实际作业状态对投苗过程进行分析,确定影响投苗效果的主要因素为投苗高度、投苗速度和穴苗倾角。以投苗成功率和基质破损率为评价指标进行单因素试验,确定各影响因素的参数范围。并进行正交试验,通过方差分析得出影响成功率和破损率的主要因素分别为穴苗倾角和投苗高度。在此基础上进行响应面分析,分析各因素交互作用对投苗效果的影响。运用MINITAB优化模块对工作参数进行优化,结果得到最佳工作参数组合为:投苗高度150 mm,投苗速度65株/min,穴苗倾角85°± 5°。验证试验结果表明,最佳工作参数下投苗成功率为96.41%,基质破损率为1.65%。该装置可实现分苗投苗作业,研究结果可为全自动移栽机设计提供参考。
农业机械;自动化;试验;穴苗移栽机;分苗机构;双旋转式
0 引 言
采用整排取苗方式能有效提高移栽机取苗效率,整排取苗后如何实现分苗、投苗成为影响移栽效率的关键问题。其中分苗机构是移栽机的核心部件,可实现穴苗的逐个分离,分苗机构应保证分苗过程快速连续、投苗精准、喂苗无损伤,投苗机构的优劣直接影响穴苗机械化移栽的质量[1-3]。
目前移栽机采用的分苗方式有2种:苗杯回形转动,依次落入栽植器中完成栽植[4-8];另一种将穴苗放入接苗带的栅格中,依靠传送带抛入接苗斗中完成栽植[9-10]。胡建平等[11]设计了一种适用于整排取苗的投苗装置,该装置可实现整排取苗间隔投苗,但是苗杯需要等待苗爪完成一次取放动作,此过程存在时间间隔,导致苗杯闲置,不利于提升投苗效率。胡先朋[12]采用带式输送、合页挡板式分苗装置,该装置依靠合页的开闭达到分苗的目的。但是该装置会对钵苗的基质和叶片造成损伤,没有解决穴苗易破损的问题。马锐[13]采用接苗带栅格放苗,依靠传送带抛入栽植口的分苗方式,但是接苗带需要等待苗爪再次取送穴苗,此分苗过程存在时间间隔,导致分苗动作不连续,移栽效率提高不明显。
本文通过增加一个工作台的方式,实现2个分苗机构交替运动,以适应移栽机单行移栽。此种分苗方式可以实现快速无间隔分苗,保证分苗过程的连续性。通过对穴苗的运动过程分析确定影响投苗效果的主要因素。通过台架试验得到主要参数工作范围,以期为全自动穴盘苗移栽机设计提供参考。
1 分苗装置与工作原理
1.1 分苗装置
分苗装置是移栽机的重要部件之一,其功能是接收来自取苗器取出的穴苗,并将其投入栽植器完成栽植作业[14-16]。其主要构成包括机械部件(底座、工作台等)与动作部件(步进电机、气缸等),各部件参数如表1示。
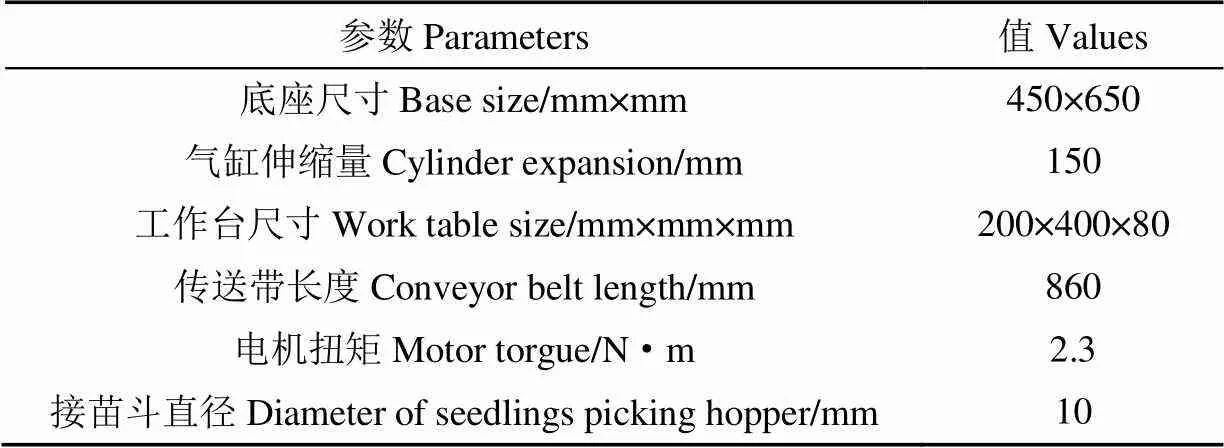
表1 分苗装置各部件参数
如图1所示,工作台1与工作台2依靠轴承固定于底座上,通过气缸推动可在接苗位和投苗位之间切换。放苗完成之后,切换至投苗位,进行依次投苗。投苗工作台固定于投苗架底座上,通过步进电机驱动传送带旋转,使得传送带上的穴苗依次抛入接苗斗完成投苗。
1.2 工作原理
图2为分苗过程的工作状态,图2a为整排取苗手将8颗穴苗放入工作台1,工作台1转动进行投苗动作。此时整排取苗手回至取苗位取苗,等待送至工作台2。图 2b为整排取苗手将8颗穴苗放入工作台2,工作台2转动进行投苗动作,此时整排取苗手又回到取苗位取苗,等待送至工作台1。图2c为工作台2即将完成投苗,此时苗爪已回拾取位置,工作台1等待作业。
图3为1次分苗作业流程示意图,取苗爪与工作台1、工作台2交替动作。初始时工作台1与工作台2处于平行位置,通过气缸作用,2个工作台交替切换至投苗位置,在步进电机的驱动下依次完成投苗作业,实现连续分苗。
2 关键部件设计
2.1 底座支架及气缸组件
2.1.1 底座
图4为投苗装置的底座,其上装有轴承组件、气缸组件、接苗斗组件。底座外形尺寸为450 mm× 650 mm,由3条长度为650 mm与4条长度为450 mm的不锈钢中空方形管钢管焊接而成。底座左上角与右上角为气缸组件安装的位置,中间钢管焊接处为轴承安装位置。
2.1.2 气缸
图5为工作台1切换过程简图,投苗时,工作台AB在气缸作用下旋转角度切换至投苗位,将苗投入E处的接苗斗。工作台旋转时,气缸行程应满足如下条件:①NE的距离尽可能小,使接苗斗靠近底座,②F点应在C点与M点之间,符合气缸实际动作。
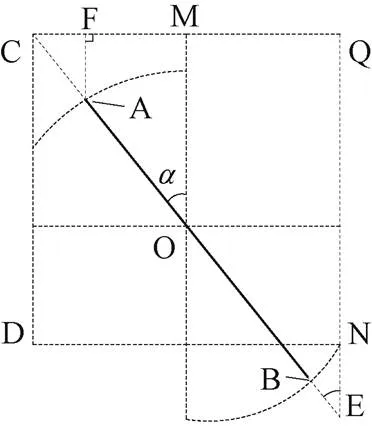
注:α为投苗工作台AB在气缸收缩状态下旋转过的角度,(°);MF为气缸伸缩长度,mm;O为旋转中心,CDNQ为底座,E为落苗位置。下同。
当AB旋转至与E处于同一直线时,MF的距离为134.16 mm,因此选用行程150 mm的SC63150型气缸,图6a、图6b分别为其收缩与伸出状态。
2.2 投苗工作台
2.2.1 支架
工作台结构为双层长方体,外形尺寸:400 mm× 200 mm×80 mm,支架外侧有合页,受气缸驱动可切换至投苗位。如图7所示,工作台的从动带轮处为投苗侧,另一侧安装步进电机。
2.2.2 传送带与栅格
图8a为工作台总体装配图,图8b为一总长860 mm的传送带,传送带外侧有等距的8个栅格,用于盛放取苗爪释放的穴苗。传送带材质为软质橡胶,可在转角处随苗带一起绕电机转动。
传送带转速为
·(1)
式中为传送带转速,mm/s,当为60株/min时,得到传送带转动速度为50 mm/s。
3 投苗运动分析
为了确定影响投苗效果的因素,并确定投苗试验的评价指标,对垂直方向运动过程分析,确定落苗高度对投苗的效果的影响;对钵苗下落过程中水平方向的运动过程分析,确定投苗速率对投苗效果的影响;对投苗过程穴苗的运动分析,确定分苗过程中穴苗倾角对投苗效果的影响。
图9为分苗过程侧视图,以投苗工作台AB所在直线为轴;竖直方向为轴,向下为正方向,建立直角坐标系,穴苗抛出后落入E点(接苗斗安装位置)。
投苗作业时穴苗倾斜角越小所受空气阻力越大,已知空气对穴苗的阻力与其运动速度成正比[17]:
F=·V(2)
式中F为空气阻力,N;为空气阻力系数,V为穴苗速度,mm/s。
投苗作业时穴苗受力如图10所示,在投苗运动的某一时刻,穴苗受到重力和空气阻力的作用,根据牛顿第二定律,建立穴苗的运动微分方程,对投苗影响因素进行探究。
3.1 水平方向投苗运动分析
通过穴苗下落过程中水平方向的运动过程分析,探究投苗速度对投苗效果的影响。
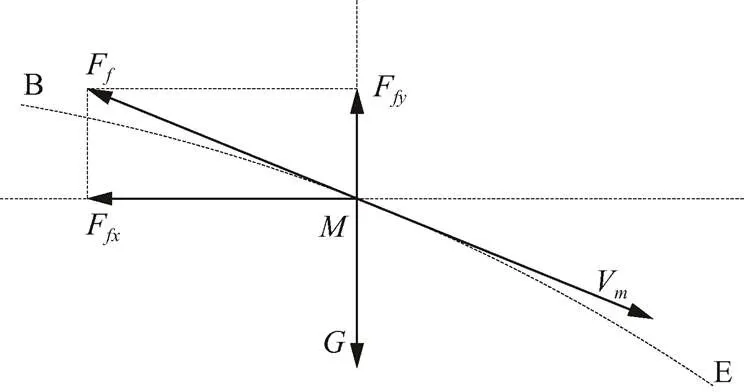
注:BE为投苗路径;Ff为空气阻力,N;Ffx、Ffy分别为空气阻力的水平与垂直分量,N;G为穴苗重力,N;Vm为穴苗运动速度,mm·s-1。
式中为穴苗质量,g;a为穴苗水平加速度,mm/s2。通过对式(3)积分,可得穴苗水平方向运动速度为
式中V为穴苗水平方向运动速度,mm/s;o为穴苗抛出速度,mm/s;为运动时间,s。将式(4)再次积分,可得穴苗水平位移为
式中为穴苗水平位移,mm。
3.2 垂直方向投苗运动分析
通过对垂直方向运动过程分析,探究落苗高度对投苗的效果的影响。
式中a为穴苗垂直加速度,mm/s2。对式(6)进行积分得穴苗垂直方向运动速度为
式中V为穴苗垂直方向运动速度,mm/s。将式(7)再次积分,得穴苗垂直方向位移为
式中为穴苗垂直方向位移,mm。不考虑对投苗效果影响时,垂直方向位移为
4 投苗性能试验
4.1 设备与材料
试验设备包括番茄穴苗分苗投苗试验装置(自制),电子式游标卡尺(上海工具厂有限公司,量程0~300 mm,精度0.02 mm),SPS402F精密电子天平(Ohaus ScoutPRO,0~400 g,精度0.01 g),MA45水分测定仪(Sartorius,0~45 g,精度0.001 g)[18]。
试验材料为新疆北疆地区主要种植品种“里格尔87-5”加工番茄苗,整盘128穴育苗,苗龄33 d。试验前对其物理参数进行测定,结果如表2所示:
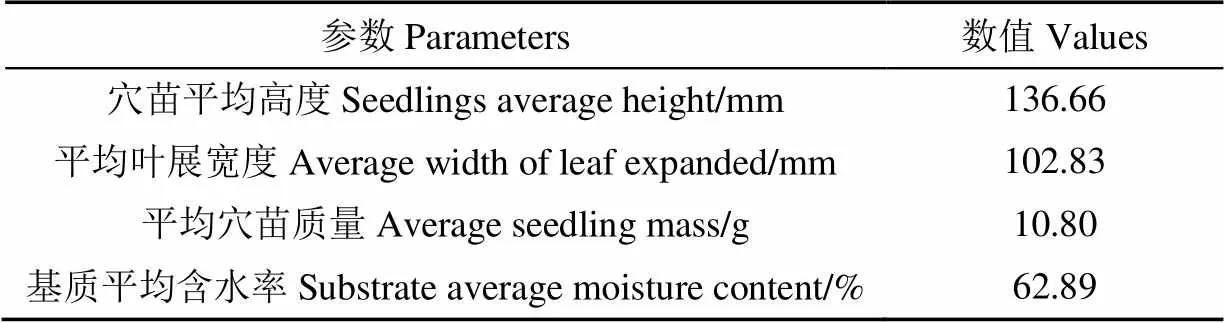
表2 穴苗特征参数
4.2 评价指标
式中为穴苗动能,J。由式(4)与式(7)可知,对于单个穴苗,质量不变,抛出速度0、空气阻力系数值、运动时间会影响穴苗速度,从而影响基质破损率。
由式(5)与式(8)可知,落苗点C的坐标为
对于单个穴苗(值不变),抛出速度0、空气阻力系数值、运动时间对落苗点水平位置有影响,因此需要根据落苗点的位置确定接苗斗的安装位置,以保证投苗成功。
运动时间受投苗高度影响,抛出速度0为传送带速度,空气阻力系数受穴苗倾角影响。综合式(10)与式(11)可知:投苗高度、投苗速度、穴苗倾角会对基质破损率与投苗成功率产生影响。
根据NY/T 1924—2010[19]和JB/T 10291—2013[20],结合钵苗自动移栽机投苗装置工作性能要求[21-23],本试验选取投苗成功率1、基质破损率2作为试验评价指标,其计算公式如下:
式中1为成功投苗株数;表示总投苗株数;1为掉落的基质质量,g;为基质总质量,g。
4.3 单因素试验
由理论分析可知,影响投苗成功率与基质破损率的因素为投苗速度、投苗高度和穴苗倾角,本文通过单因素试验探究每个因素对投苗效果的影响。
根据前期落苗高度试验可知工作台投苗作业的高度范围在125~265 mm内,落苗高度设置5个水平:125、160、195、230和265 mm。依据目前移栽机移栽速率范围在40~120 株/min,投苗速率设置成5个水平:40、60、80、100和120 株/min;取苗爪取出穴苗释放后,落在传送带栅格内的穴苗倾斜角度不同。式(11)可知,不同倾斜角度的穴苗在下落过程中受到空气阻力不同,从而影响落苗位置。依据穴苗抛落过程中,可能出现的倾斜程度,将穴苗倾斜角设置3个水平:15°± 15°、45°± 15°和75°± 15°。每组试验测试128株穴苗,重复5次,试验结果如图11所示。
采用SPSS 21.0软件进行统计分析,其中手术指标等计量资料用(±s)表示,采用 t检验,临床疗效等计数资料用[n(%)]表示,采用χ2卡方检验,P<0.05为差异有统计学意义。
由图11a可知,投苗高度为160 mm时,投苗成功率最高,投苗高度大于160 mm时,基质破损率上升明显,因此选取投苗高度为160 mm;由图11b可知投苗速率为60 株/min时,投苗成功率较高,同时基质破损率在较低水平,因此选取投苗速率为60 株/min;由图11c可知,穴苗倾角为75°± 15°时,投苗成功率最高,且基质破损率在移栽允许范围内,因此选取穴苗倾角为75°± 15°。综上,投苗高度为160 mm,投苗速率为60 株/min,穴苗倾斜角为75°± 15°时,有较好投苗效果。
4.4 正交试验
4.4.1 试验设计
为验证以上3个因素的交互作用对分苗装置投苗效果的影响,使用Box-Benhken响应曲面分析法,设计15组正交试验[24-26],每组试验选取64棵苗,进行回归试验分析。
根据单因素实验结果选取投苗高度为160 mm,投苗速率为60 株/min作为基准参数,在75°± 15°穴苗倾角范围内进行等值细分并设计正交试验。表3为正交试验因素水平编码表。
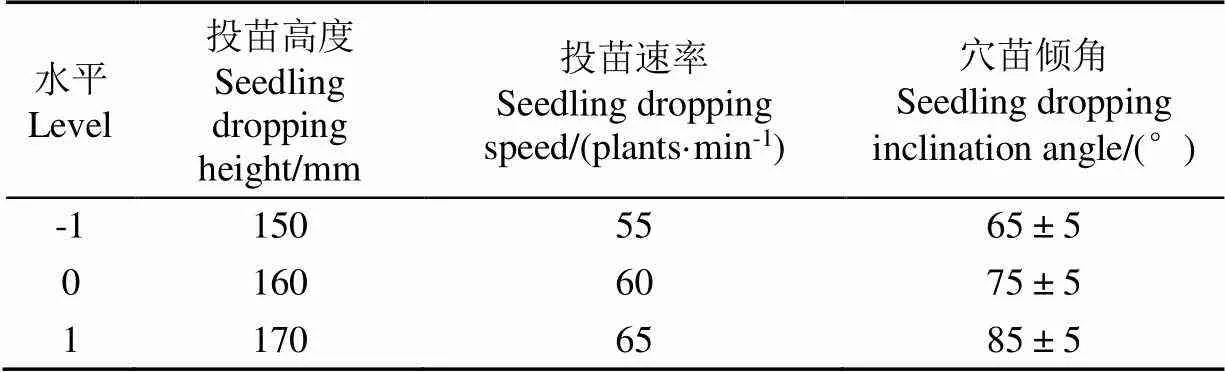
表3 试验因素水平编码
4.4.2 试验结果与分析
试验结果如表4,在Mintab17中分别建立投苗高度、投苗速率、穴苗倾角与投苗成功率1、基质破损率2之间的回归模型,进行响应曲面分析。
表5为回归模型的方差结果,从表5可知,对投苗成功率1影响顺序从大到小依次为穴苗倾角、投苗速率和投苗高度。穴苗倾角的值为0,对投苗成功率影响极显著。
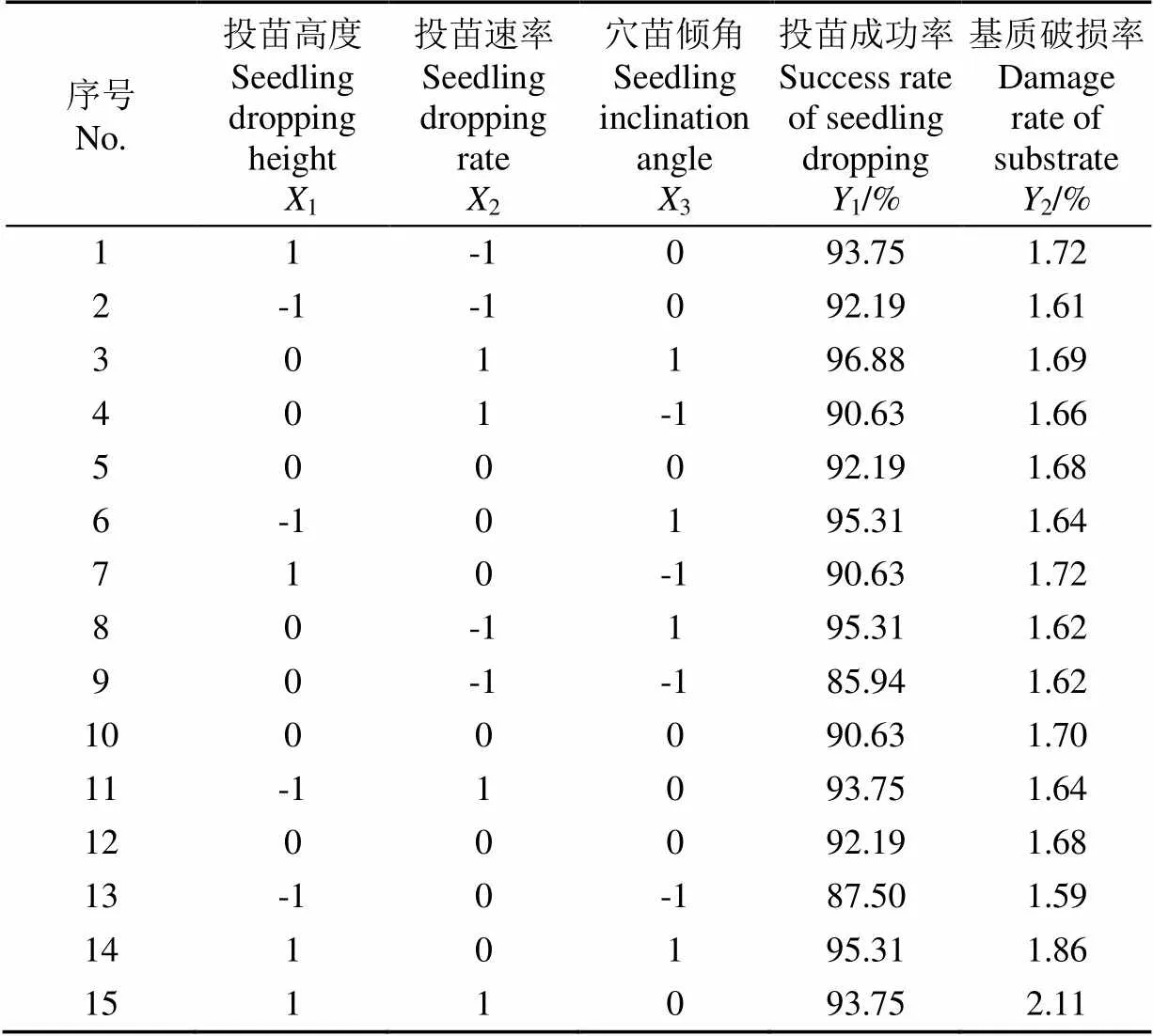
表4 正交试验结果
Note:1,2and3is the level value of experimental factors.
对于基质破损率2,3个因素的值从小到大为投苗高度、投苗速率、穴苗倾角。其中,1与2的值均小于0.05,说明这2个因素对基质破损率影响显著。
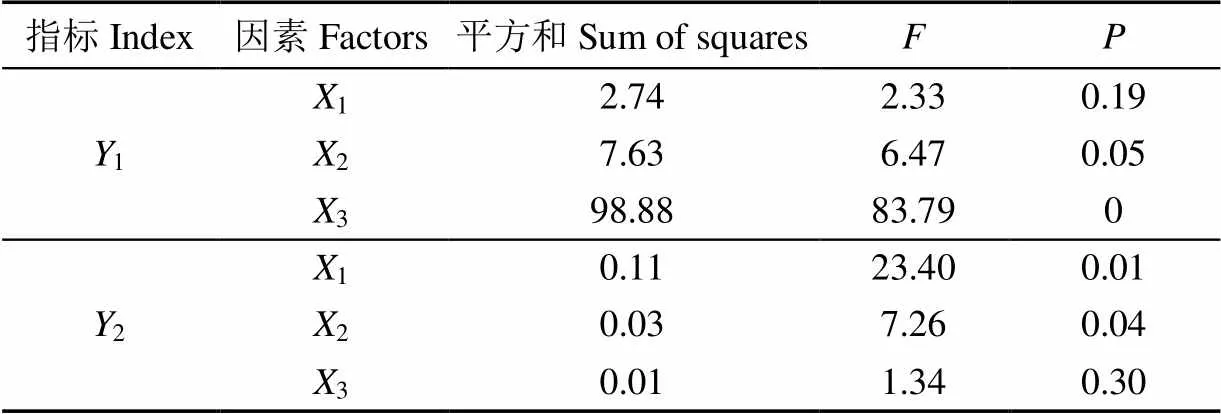
表5 方差分析结果
注:<0.05表示差异显著;<0.01表示差异极显著。
Note:<0.05 means the difference is significant;<0.01 means the difference is extremely significant.
4.4.3 交互作用结果分析
图12为各因素两两交互作用对投苗成功率的响应曲面图。由图12a可知,当投苗高度和投苗速率变化时,投苗成功率均为90%~95%,变化不明显,说明这2个因素对投苗效果影响不显著。由图12b可知,投苗成功率随穴苗倾角增大方向变化较明显,而随投苗高度的变化不明显,说明穴苗倾角是影响投苗成功率的重要因素,穴苗倾角的值为85°± 5°时投苗高度为170 mm。由图12c可知,当穴苗倾角变化时,投苗成功率有明显变化,而投苗速率变化时成功率变化不明显,说明穴苗倾角对成功率影响显著。
图13为各因素两两交互作用对基质破损率的响应曲面图。由图13a可知,基质破损率随投苗高度减小而明显减小,投苗速率减小时,基质破损率也随之变化,但其变化程度不如前者明显,说明投苗高度是影响基质破损率的主要因素,同时投苗速率也会对基质破损率有影响。投苗高度为150 mm时投苗速率为65 株/min。由图13b可知,基质破损率随投苗高度的下降明显减小,而穴苗倾角变化对基质破损率影响不大,说明投苗高度是影响基质破损率的主要因素。投苗高度为150 mm时穴苗倾角为85°± 5°。由图13c可知,当投苗速率减小时,基质破损率随之减小,但变化不明显,说明投苗速率对基质破损率有影响,而穴苗倾角变化对基质破损率没有影响。对比图13可知,投苗高度与投苗速率是影响基质破损率的主要因素,而穴苗倾角对破损率影响不显著。
4.5 参数优化与验证
为使分苗装置具有更好的投苗效果,以投苗成功率最高、基质破损率最低为优化目标,利用Mintab17[27]进行优化求解,目标函数与约束条件为
优化后的投苗作业参数为:投苗高度150 mm,投苗速率65 株/min,穴苗倾角为85°± 5°。在该作业参数下,投苗成功率的拟合值为97.33%,基质破损率的拟合值为1.58%。
结合优化后的最佳参数和相关规范[28-30]对分苗装置作业性能进行验证试验,试验采用苗龄33 d的“里格尔87-5”番茄穴苗,在石河子大学精准农业试验室进行,图14为分苗试验装置。共进行5次试验,每次试验128株穴苗,试验结果如表6所示。
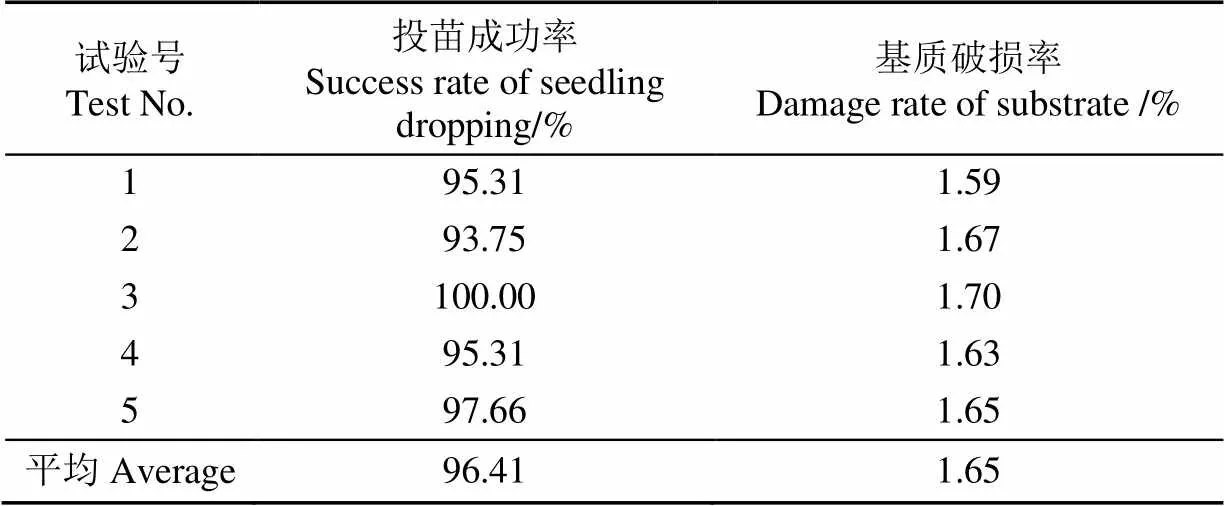
表6 作业性能验证试验结果
5次试验的投苗成功率平均值为96.41%,基质破损率平均值为1.65%,该分苗装置可以实现自动投苗作业。
5 结 论
1)根据单行移栽的移栽机作业方式,设计了一种新型分苗装置,该装置由2个工作台构成,在气缸推动下交替切换至投苗位,实现连续分苗,无间断投苗作业,可以有效提升分苗投苗环节的工作效率。
2)建立分苗装置投苗运动的微分方程,分别得出水平和竖直两方向的速度和位移函数。分析落苗位置与落苗动能,将投苗成功率和基质破损率作为评价指标,得到影响分苗投苗作业的主要因素:投苗高度、投苗速率和穴苗倾角。
3)通过单因素试验,得到分苗作业的最佳参数,并在此基础上进行正交试验,从方差分析的结果可知:影响投苗成功率因素的顺序依次为穴苗倾角、投苗速率和投苗高度,影响基质破损率因素的顺序依次为投苗高度、投苗速率和穴苗倾角。根据响应曲面分析结果,得出穴苗倾角和投苗高度分别是影响成功率和破损率的主要因素。在优化参数条件下进行试验,当投苗高度为150 mm,投苗速率为65 株/min,穴苗倾角85°± 5°时,平均投苗成功率为96.41%,平均基质破损率为1.65%。台架试验结果与优化结果基本一致,分苗装置能够满足分苗投苗作业需求,可为全自动穴苗移栽机分苗装置设计提供参考。
[1]王帅. 育苗移栽机具的发展现状及趋势[J]. 农业科技与装备,2019(2):58-59.
Wang Shuai. Development situation and trend of seedling transplanting machine[J]. Agriculture Science & Technology and Equipment, 2019(2): 58-59. (in Chinese with English abstract)
[2]毛灿,罗海峰,朱毅,等. 钵苗移栽机械研究现状与发展趋势[J]. 中国农机化学报,2020,41(1):215-222.
Mao Can, Luo Haifeng, Zhu Yi, et al. Research ststus and development trend of seedling transplanting machinery[J]. Journal of Chinese Agricultural Mechanization, 2020, 41(1): 215-222. (in Chinese with English abstract)
[3]何亚凯,颜华,崔巍,等. 蔬菜自动移栽技术研究现状与分析[J]. 农业工程,2018,8(3):1-7.
He Yakai, Yan Hua, Cui Wei, et al. Research situation and analysis on transplanting technology for vegetable seedling[J]. Agricultural Engineering, 2018, 8(3): 1-7. (in Chinese with English abstract)
[4]杨传华,方宪法,杨学军,等. 基于PLC的蔬菜钵苗移栽机自动输送装置[J]. 农业机械学报,2013,44(1):19-23,18.
Yang Chuanhua, Fang Xianfa, Yang Xuejun, et al. Automatic delivery mechanism of potted-seedling for vegetable transplanter based on PLC[J]. Transactions of the Chinese Society for Agricultural Machinery (Transactions of the CSAE), 2013, 44(1): 19-23, 18. (in Chinese with English abstract)
[5]韩长杰,杨宛章,张学军,等. 穴盘苗移栽机自动取喂系统的设计与试验[J]. 农业工程学报,2013,29(8):51-61.
Han Changjie, Yang Wanzhang, Zhang Xuejun, et al. Design and test of automatic feed system for tray seedlings transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(8): 51-61. (in Chinese with English abstract)
[6]严宵月,胡建平,吴福华,等. 整排取苗间隔放苗移栽机设计与试验[J]. 农业机械学报,2013,44(1):7-13.
Yan Xiaoyue, Hu Jianping, Wu Fuhua, et al. Design and experiment of full-row-pick-up and single-dropping seedling transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1): 7-13. (in Chinese with English abstract)
[7]石新异,杨启志,徐莉,等. 一种新型直动式钵苗分苗装置的设计与试验[J]. 江苏大学学报:自然科学版,2019,40(3):301-306,312.
Shi Xinyi, Yang Qizhi, Xu Li, et al. Design and experiment of a new direct action pot seedling separating equipment[J]. Journal of Jiangsu University: Natural Science Edition, 2019, 40(3): 301-306, 312. (in Chinese with English abstract)
[8]倪有亮,金诚谦,刘基. 全自动移栽机取送苗系统的设计与试验[J]. 农业工程学报,2015,31(23):10-19.
Ni Youliang, Jin Chengqian,Liu Ji. Design and experiment of system for picking up and delivering seedlings in automatic transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(23): 10-19. (in Chinese with English abstract)
[9]崔财豪,曹卫彬,李树峰,等. 基于PLC的移栽机整排取送苗控制系统的设计[J]. 农机化研究,2019,41(4):91-95.
Cui Caihao, Cao Weibin, Li Shufeng, et al. Design of picking seedling and feeding seedling control system for whole row of seedlings transplanting machine based on PLC[J]. Journal of Agricultural Mechanization Research, 2019, 41(4): 91-95. (in Chinese with English abstract)
[10]曹卫彬,王侨,张振国. 穴盘苗自动取苗机构的研究[C]中国农业机械学会:2012中国农业机械学会国际学术年会论文集,杭州,2012:229-232.
Cao Weibin, Wang Qiao, Zhang Zhenguo. The research on automatic pick-up plug seedlings mechanism[C]. Chinese Society for Agricultural Machinery: Proceedings of the 2012 China Agricultural Machinery Society International Academic Conference, Hangzhou,2012: 229-232. (in Chinese with English abstract)
[11]胡建平,常航,杨丽红,等. 自动移栽机整排取苗间隔投苗控制系统设计与试验[J]. 农业机械学报,2018,49(6):78-84.
Hu Jianping, Chang Hang, Yang Lihong, et al. Design and experiment of control system for automatic transplanter picking up and spacing casting whole row of seedlings[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(6): 78-84. (in Chinese with English abstract)
[12]胡先朋. 油菜钵苗移栽机分苗装置设计与试验[D]. 武汉:华中农业大学,2016.
Hu Xianpeng. Design and Experiment on Seedling Detaching Device for Rape Pot Seedling Transplanter[D]. Wuhan: Huazhong Agricultural University, 2016. (in Chinese with English abstract)
[13]马锐. 穴盘苗整排自动取苗机构控制系统设计研究[D]. 石河子:石河子大学,2018.
Ma Rui. The Design and Research on the Full-Row-Pincette- Type Picking-Up Mechanism and Control System of Potted-Seedling Automatic Transplanter[D]. Shihezi: Shihezi University, 2018. (in Chinese with English abstract)
[14]王宁,李江全,任玲,等. 基于三菱触摸屏的整排穴盘苗输送控制系统设计[J]. 农机化研究,2020,42(9):50-57.
Wang Ning, Li Jiangquan, Ren Ling, et al. Design of whole row plug seedling delivery control system based on mitsubishi touch screen[J]. Journal of Agricultural Mechanization Research, 2020, 42(9): 50-57. (in Chinese with English abstract)
[15]任玲,曹卫彬,马锐,等. 基于LabVIEW的苗盘输送控制系统设计[J]. 农机化研究,2019,41(9):104-109.
Ren Ling, Cao Weibin, Ma Rui, et al. Seedling tray conveying control system design based on LabVIEW[J]. Journal of Agricultural Mechanization Research, 2019, 41(9): 104-109. (in Chinese with English abstract)
[16]任玲,王宁,曹卫彬,等. 番茄钵苗整排取苗机械手定位的模糊PID控制[J]. 农业工程学报,2020,36(8):21-30.
Ren Ling, Wang Ning, Cao Weibin, et al. Fuzzy PID control of manipulator positioning for taking the whole row seedlings of tomato plug seedlings[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(8): 21-30. (in Chinese with English abstract)
[17]袁挺,王栋,文永双,等. 蔬菜移栽机气吹振动复合式取苗机构设计与试验[J]. 农业机械学报,2019,50(10):80-87.
Yuan Ting, Wang Dong, Wen Yongshuang, et al. Design and experiment of seedlings unloading mechanism based on methods of air-blowing and vibration for vegetable transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(10): 80-87. (in Chinese with English abstract)
[18]马晓晓,李华,曹卫彬,等. 番茄钵苗移栽机自动取苗装置作业参数优化与试验[J]. 农业工程学报,2020,36(10):46-55.
Ma Xiaoxiao, Li Hua, Cao Weibin, et al. Optimization and experiment of working parameters of automatic seedling picking device for tomato seedlings transplanting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(10): 46-55. (in Chinese with English abstract)
[19]中华人民共和国农业部.油菜移栽机质量评价技术规范:NY/T 1924—2010 [S]. 北京:中国农业出版社,2010.
[20]中华人民共和国工业和信息化部.旱地栽植机械:JB/T 10291—2013 [S]. 北京:机械工业出版社,2013.
[21]廖庆喜,胡先朋,张照,等. 油菜移栽机分苗装置分苗过程与钵苗钵体完整性分析[J]. 农业工程学报,2015,31(16):22-29.
Liao Qingxi, Hu Xianpeng, Zhang Zhao, et al. Analysis on detaching process of detaching device and seedling pot integrity about rape transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(16): 22-29. (in Chinese with English abstract)
[22]刘姣娣,曹卫彬,田东洋,等. 基于苗钵力学特性的自动移栽机执行机构参数优化试验[J]. 农业工程学报,2016,32(16):32-39.
Liu Jiaodi, Cao Weibin, Tian Dongyang, et al. Optimization experiment of transplanting actuator parameters based on mechanical property of seedling pot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(16): 32-39. (in Chinese with English abstract)
[23]谢守勇,阳尚宏,刘军,等. 蔬菜移栽机斜插夹钵式取投苗装置研制[J]. 农业工程学报,2020,36(6):1-10.
Xie Shouyong, Yang Shanghong, Liu Jun, et al. Development of the seedling taking and throwing device with oblique insertion and plug clipping for vegetable transplanters[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 36(6): 1-10. (in Chinese with English abstract).
[24]王立军,张志恒,刘天华,等. 玉米收获机割台砍劈式茎秆粉碎装置设计与试验[J]. 农业机械学报,2020,51(7):109-117.
Wang Lijun, Zhang Zhiheng, Liu Tianhua, et al. Design and experiment of device for chopping stalk of header of maize harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(7): 109-117. (in Chinese with English abstract)
[25]肖名涛,肖仕雄,陈斌,等. 油菜钵苗开沟槽水平推苗栽植机构设计与试验[J]. 农业机械学报,2019,50(10):56-63,71.
Xiao Mingtao, Xiao Shixiong, Chen Bin, et al. Design and experiment of horizontal push seedling transplanting mechanism for rapeseed seedling opening groove[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(10): 56-63, 71. (in Chinese with English abstract)
[26]王金武,关睿,高鹏翔,等. 胡萝卜联合收获机单圆盘对顶切割装置设计与试验[J]. 农业机械学报,2020,51(9):73-81.
Wang Jinwu, Guan Rui, Gao Pengxiang, et al. Design and experiment of single disc to top cutting device for carrot combine harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 73-81. (in Chinese with English abstract).
[27]马逢时,吴诚鸥,蔡霞,等. 基于MINITAB的现代实用统计[M]. 北京:中国人民大学出版社,2009.
[28]任露泉. 试验优化设计与分析[M]. 北京:高等教育出版社,2003.
[29]韩长杰. 农机试验设计[M]. 北京:中国农业科学技术出版社,2018.
[30]金鑫,陈凯康,姬江涛,等. 基于模态置信度准则的插秧机支撑臂模态分析与结构优化[J]. 农业工程学报,2018,34(18):93-101.
Jin Xin, Chen Kaikang, Ji Jiangtao, et al. Modal analysis and structure optimization of transplanter support arm based on modal assurance criterion[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(18): 93-101. (in Chinese with English abstract)
Design of double-rotation seedlings separating device for transplanters
Ren Ling, Zhao Bindong, Cao Weibin※, Wang Jikui, Wang Ning, Song Wenbin
(1.,,832003,; 2.,832003,)
Transplanting has become a common practice in tomato cultivation, where seedlings grown in doors are replanting into a final planting location for the growing season. Most tomato planting is distributed in Xinjiang of northwest China, due mainly to high difference in temperature, long sunshine, and less rainfall. Weather factors such as hail and cold in early spring seriously determined the survival of tomato seedlings. However, a combination of semi-automatic machine and manual transplanting was generally adopted in current tomato planting, indicating low transplanting efficiency and high labor intensity. Therefore, it is necessary to develop a high-speed automatic transplanter suitable for large-scale tomato planting. Since the picking speed can reach 120 plants per minute in previous automatic transplanters, the planting speed is not so high, the maximum of only 60 plants per minute. Furthermore, the planting speed also determined the transplanting speed of the automatic transplanting machine. In this study, a double-row seedling cast device was designed with high efficiency, continuity, and damage resistance in transplanting seedlings. The specific procedure was as follows: 1)Two workstations were alternately utilized to implement the continuous casting of seedlings. The assembled cylinder in front of the base was used to push the rotation of the cast around the bearing center that connected to the base. 2)A coordinate system was established from the side view of cast movement, considering the influence of air resistance on the motion. 3)Motion equations were set in two dimensions (the horizontal and vertical) to determine the main factors of seedling injection, including the inclination angle of seedling ,the height, and speed of the cast. A three-level single factor orthogonal test was carried out to evaluate the influence of each single factor. The experimental procedure was that: 1)Five height levels were taken as test variables, showing that the damage rate was low, whereas, the success rate was high, at the height between 125 mm to 160 mm. 2)Five cast speeds were chosen between 40 to 120 plants per minute, showing that the damage rate was going up as the cast speed increased. The best success rate was achieved, when the cast speed reached 60 plants per minute. 3)The success rate was found higher, as the inclination angle of seedlings was higher. The results showed that the influence of each factor on the success rate was ranked: the inclination angle, cast speed, and height. The order of damage rate was like this: cast height, cast speed, and inclination angle. Then, a Box-Benhken response surface method (RSM) was used to determine the interaction of three factors, indicating that the main factor of success rate was the inclination angle, whereas the damage rate was the cast height. Besides, an optimal combination of three factors was obtained after the working parameters were optimized in theMinitab platform. Finally, a field test was conducted to verify the operating parameters, where the success rate of seedling planting was 96.41%, while the matrix damage rate was 1.65%, meeting the requirements of the seedling throwing operation. The findings can provide a promising reference to develop high-speed automatic transplanters in tomato cultivation.
agricultural machinery; automation; experiments; seedlings transplanters; seedling dividing mechanism; double-rotation type
任玲,赵斌栋,曹卫彬,等. 穴苗移栽机双旋转式分苗装置设计[J]. 农业工程学报,2021,37(8):10-18.doi:10.11975/j.issn.1002-6819.2021.08.002 http://www.tcsae.org
Ren Ling, Zhao Bindong, Cao Weibin, et al. Design of double-rotation seedlings separating device for transplanters[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(8): 10-18. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.08.002 http://www.tcsae.org
2020-10-16
2021-03-29
国家自然科学基金项目(51765059);兵团优秀青年教师项目(CZ027213)
任玲,博士,教授,研究方向为农业自动化与信息化。Email:2542958572@qq.com
曹卫彬,教授,博士生导师,研究方向为农业机械设计及自动化技术。Email:Wbc828@163.com
10.11975/j.issn.1002-6819.2021.08.002
S223.92
A
1002-6819(2021)-08-0010-09
猜你喜欢
新农业(2022年20期)2022-11-07
橡塑技术与装备(2022年10期)2022-10-03
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
农村百事通(2020年21期)2020-11-23
学苑创造·B版(2020年5期)2020-07-06
锻压装备与制造技术(2020年1期)2020-03-11
电子制作(2019年9期)2019-05-30
山东工业技术(2016年15期)2016-12-01
科学中国人(2016年36期)2016-07-12